




DFRobot SEN0142 MPU6050 六自由度陀螺儀加速度計 IMU 模組,具備 I2C 數位運動處理器,適用於 Arduino 機器人 &
DFRobot SEN0142 MPU6050 六自由度陀螺儀加速度計 IMU 模組,具備 I2C 數位運動處理器,適用於 Arduino 機器人 &
DFRobot
定價
$25.00 USD
定價
售價
$25.00 USD
單價
每
已包含稅額。
結帳時計算運費。
無法載入取貨服務供應情況
概述
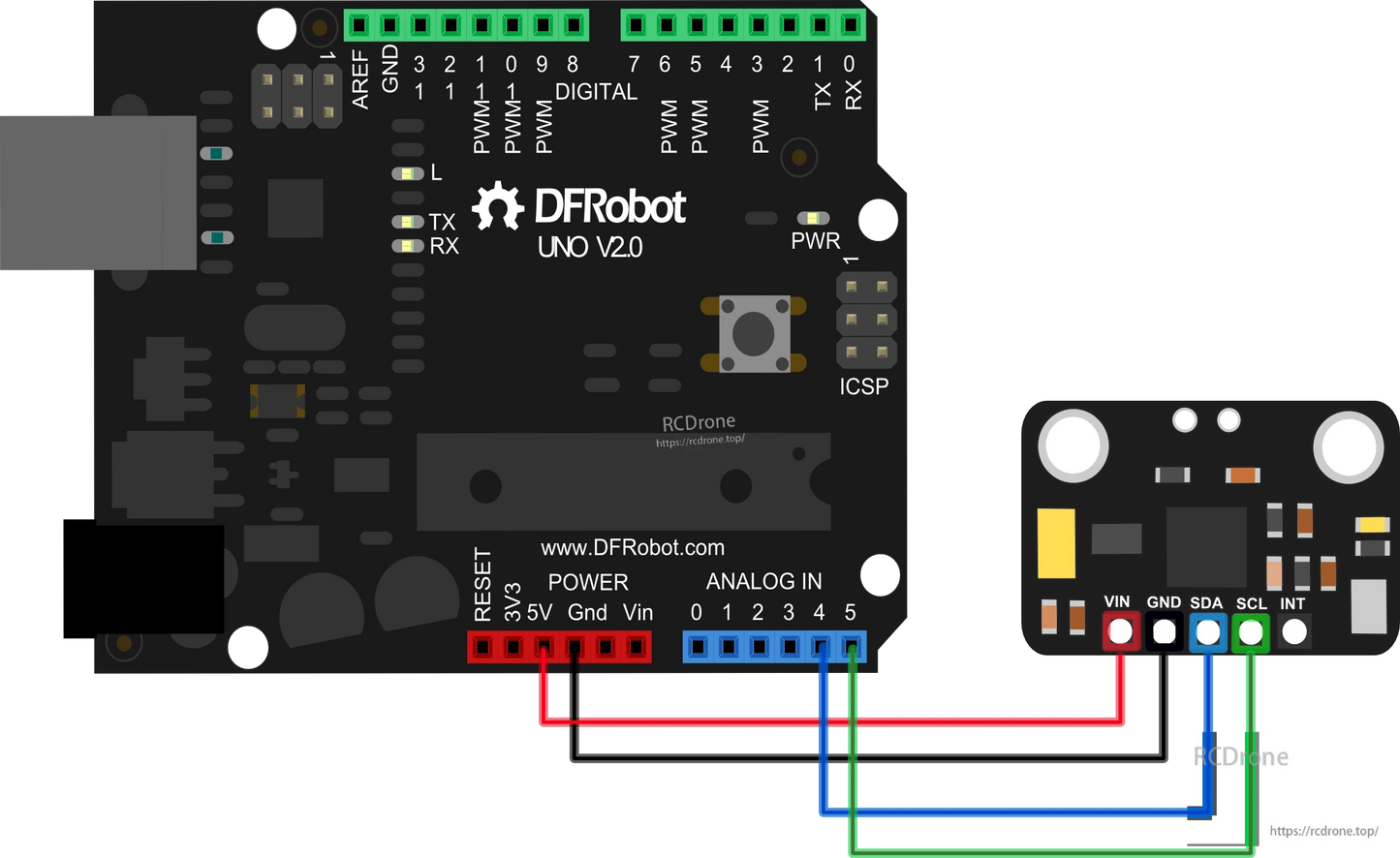
這款 DFRobot SEN0142 MPU6050 6 DOF IMU 模組 整合了 3 軸陀螺儀 和 3 軸加速度計,在單一晶片上提供準確的運動感測,適用於機器人、無人機、可穿戴設備及 Arduino 專案。該模組具備 數位運動處理器 (DMP),支援先進的 6 軸和 9 軸運動融合演算法,能夠輸出四元數、歐拉角及原始感測器數據。MPU6050 的輸入電壓範圍廣泛,為 3V–5V,可直接連接至 Arduino 和其他微控制器,以實現即時運動追蹤和手勢檢測。
主要特點
-
將 三軸陀螺儀 和 三軸加速度計 集成於一個芯片
-
可編程加速度計範圍: ±2g, ±4g, ±8g, ±16g
-
陀螺儀靈敏度: ±250, ±500, ±1000, ±2000 dps
-
數字運動處理器 (DMP) 用於板載運動融合和手勢識別
-
I2C數字接口 支持矩陣、四元數、歐拉角和原始數據格式
-
嵌入式偏置 &放大器和指南針校準 以提高準確性
-
與 Arduino 和可穿戴電子設備 通過 I2Cdevlib
兼容
規格
-
工作電壓: 3–5 V
輸出: I2C 數位 (6/9 軸運動融合數據)
-
加速度計: ±2g / ±4g / ±8g / ±16g 可編程範圍
-
陀螺儀: ±250 / ±500 / ±1000 / ±2000 dps 靈敏度
-
數據格式: 旋轉矩陣、四元數、歐拉角、原始數據
-
尺寸: 14 × 21 mm
應用
-
機器人運動感應
-
Arduino &和 DIY 電子項目
-
人機互動 (HCI)
-
可穿戴設備和手勢控制
-
導航和平衡系統 (e.g., Segway型運輸工具)
-
無人機穩定和運動追蹤
詳細資訊



範例代碼
請先下載 庫 以便使用所有IMU傳感器!




- 選擇項目後,整個頁面將重新整理。
- 在新視窗中開啟。