


BETAFPV F4 2-3S 20A AIO 飛控 V1,串列 ELRS 2.4G,9V/5V BEC,DJI O3 6-Pin PMU
BETAFPV F4 2-3S 20A AIO 飛控 V1,串列 ELRS 2.4G,9V/5V BEC,DJI O3 6-Pin PMU
BETAFPV
定價
$81.99 USD
定價
售價
$81.99 USD
單價
每
已包含稅額。
結帳時計算運費。
無法載入取貨服務供應情況
概述
主要特點
- 輸入電壓:2-3S
- 雙 BEC 輸出:9V@2A(DJI O3)和 5V@3A(外部設備)
- DJI O3 6-pin PMU 以便於 HD VTX 安裝(連接器無需焊接)
- 內建 ESC:20A 持續,25A 峰值;信號支持 D-shot300 / D-shot600
- MCU:STM32F405RGT6 @ 168MHz
- 板載接收器:串行 ELRS 2。4G (CRSF 協議)
- IMU (SPI): ICM42688P / ICM42605 (圖形註解顯示“@8K”)
- 16MB 黑匣子;氣壓計;電壓& 電流感測
- USB 端口移至後方 (SH1.0 4-pin)
- UART3 可釋放 (TX3/RX3),並且可以通過以下描述的硬體修改切斷板載 RX 電源
規格
| 重量 | 5.58g (不含馬達連接器和電源線);5.92g (含馬達連接器) |
| 安裝孔尺寸 | 26mm x 26mm |
| CPU | STM32F405RGT6 (168MHz) |
| 六軸 IMU (SPI) | ICM42688P / ICM42605 |
| 接收器 (RX) | 串行 ELRS 2.4G 接收器 |
| RX 韌體版本 | BETAFPV AIO 2400 RX ELRS V3.3. |
| 天線 | 搪瓷線 |
| 黑盒記憶體 | 16MB |
| 感測器 | 氣壓計 (BMP280 / DSP310); 電壓 & 電流 |
| 5V BEC | 5V 3A@8V supply * |
| 9V BEC | 9V 2A@8V supply * |
| USB端口 | SH1.0 4針 |
| 內建ESC電流 | 20A持續; 峰值25A |
| ESC輸入電壓 | 2-3S |
| FC固件版本 | Betaflight_4.4.1_BETAFPVF405 |
| ESC固件 | C_X_70_48_V0.19.2.hex (BB51 Bluejay硬體) |
| ESC信號支持 | D-shot300, D-shot600 |
* BEC的輸出電流會隨著溫度的升高而減少。
接線 / 引腳重點 (來自電路板圖)
- 電池接點:Batt+ (2-3S),Batt-
- HD數位VTX端口(連接器);VCC註明:9V(默認)/ 5V
- I2C接點:SCL,SDA
- UART接點顯示:T1/R1,T6/R6,TX3/RX3,TX4/RX4;也顯示SBUS接點
- 蜂鳴器接點:BUZZ+和BUZZ-;顯示LED接點
- 氣壓計標記:BMP280/DSP310
- 接收器相關標記顯示:SX1280/SX1281,ESP8285,WiFi天線,RX LED(綠色),FC LED(藍色)
- 底部圖示標記:FC/接收器BOOT按鈕,RGB LED 1 / RGB LED 2,5V BEC,板載電流感測器
- 底部圖示顯示的USB接點:D-,D+,GND,USB 5V
- 底部圖示顯示的ESC MCU標記:EFM8BB51(FW C_X_70);在ESC區域周圍顯示“20A MOS”;ESC1/ESC2/ESC3/ESC4標籤
設置說明(接線圖中顯示的文字)
- 對於HD數位VTX,UART4需要啟用Configuration/MSP。
- 如果使用外部接收器,請將 UART1/6 配置為串行 RX。
- GPS:在 UART1/6 中將傳感器輸入設置為“GPS”,然後在 GPS 標籤下啟用 GPS,並選擇正確的 GPS 模塊協議。
- SBUS 協議 RX:將接收器模式設置為“基於串行的接收器”,並將串行接收器提供者設置為“SBUS”。
- CRSF 協議 RX:將接收器模式設置為“基於串行的接收器”,並將串行接收器提供者設置為“CRSF”。
- 顯示的 HD 數字 VTX 示例:Caddx Vista / Runcam Link VTX,Walksnail VTX,HDZero VTX。
- 顯示的 SBUS 協議 RX 示例:Frsky XM+ / Futaba AC900 / Flysky RX2A Pro。
- 顯示的 CRSF 協議 RX 示例:TBS Nano / ELRS 系列 RX。
- 注意:某些 HD 數字 VTX 單元可能包括集成的 SBUS 接收器(與 DJI 無線電兼容)。使用外部接收器時,數字 VTX 的 SBUS 接線可能不是必需的。
常見問題 / 硬體選項
- 斷電: 移除晶片珠可斷開電源;要重新使用板載 ELRS 接收器,請將焊盤焊接在一起以恢復電源。
- UART3 釋放: 移除焊盤上的兩個電阻可釋放 UART3(左:TX3,右:RX3)。要重新連接,請在重新使用板載 ELRS 接收器時將焊盤焊接在一起。
- 電壓開關(HD VTX 連接器): HD VTX 連接器的默認電壓為 9V。要使用 WalkSnail Avatar HD mini 1s 和 Lite,請確保電源為 5V,方法是將晶片珠從 9V 位置移至 5V 位置(或使用焊接代替晶片珠在 5V 和 9V 焊盤之間切換)。
- 馬達選擇注意事項: 避免使用超過 20,000KV 的馬達。
韌體 / 下載
如有建造、接線或韌體問題,請聯繫 https://rcdrone.top/ 或 [email protected].
- FC 韌體 (STM32F405 版本): Betaflight_4.4.1_BETAFVF405
- 韌體 & CLI 備份下載: https://support.betafpv.com/hc/en-us/articles/21884915967513-CLI-for-F4-2-3S-20A-Flight-Controller-ELRS-V1-0-
- Betaflight 4.4.1 發布: https://github.com/betaflight/betaflight/releases/tag/4.4.1
ESC 韌體說明
- 基於 BLHeliSuite16714903 的 BB51 ESC 解決方案,搭配 Bluejay ESC 韌體。
- 支持在 Betaflight 中的雙向 D-shot 和 RPM 過濾。
- PWM 頻率選項: 24kHz, 48kHz, 96kHz; 默認出廠設置: 48kHz。
- 由於可能的馬達空轉設置問題,提供的說明中不建議使用 96kHz。
- 提供的警告: 請勿以較短的間隔閃存韌體,因為這可能導致停滯並損壞飛行控制器。
- ESC-配置器: https://preview.esc-configurator.com/
- BLHeliSuite16714903: https://github.com/4712/BLHeliSuite/releases/tag/16714903
- Bluejay 固件版本: https://github.com/bird-sanctuary/bluejay/releases (注意顯示: 選擇 C_X_70.HEX)
串行 ELRS 2.4G RX (綁定 & 更新說明)
- 在接收器和飛行控制器之間使用 CRSF 協議。
- 通過三次開關電源進入綁定狀態(插入並拔出飛行控制器三次)。
- 綁定模式指示: RX LED 快速雙閃; 已綁定: 固定亮燈。
- 接收器更新方法說明: Wi-Fi 或 Betaflight 串行直通。
- 直通更新說明: 將 FC 插入電腦,不要連接到 Betaflight 配置器; 選擇目標 “BETAFPV 2.4GHz AIO RX”; 使用 Betaflight 直通在 ExpressLRS 配置器中閃存。
- 固件閃存指南:https://support.betafpv.com/hc/en-us/articles/4404231679129-How-to-Flash-Firmware-of-ELRS-RX-TX
包含內容
- 1 x F4 2-3S 20A AIO FC V1
- 4 x M2*10 機械螺絲
- 4 x M2*10 尼龍螺絲
- 4 x M2 螺母
- 4 x 減震球
- 4 x JST1.25mm 角插座
- 4 x JST1.25mm 直插座
- 1 x SH1.0 4針適配器線
- 1 x Type-C 轉 SH1.0 轉接頭
- 1 x XT30 電源線
- 1 x 濾波電容
- 1 x 30mm 雙頭 VTX 連接線
- 1 x 60mm 單頭 VTX 連接線
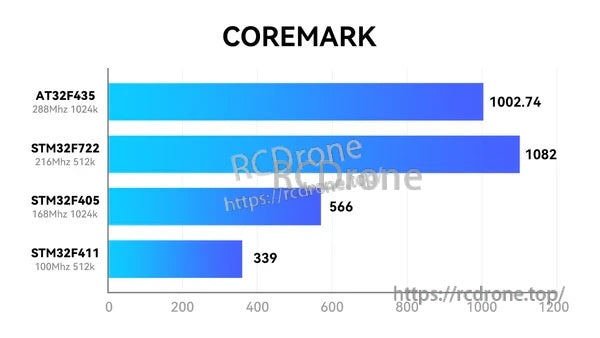
參考(產品圖形中顯示的 CoreMark 圖表)
| AT32F435 (288MHz 1024k) | 1002.74 |
| STM32F722 (216MHz 512k) | 1082 |
| STM32F405 (168MHz 1024k) | 566 |
| STM32F411 (100MHz 512k) | 339 |
詳細

一個緊湊的2–3S AIO解決方案,將F4飛行控制器與20A ESC配對,適用於HD whoop風格的建設。

清晰的上方焊盤圖幫助識別DJI數字VTX連接器、電池焊盤、UART和蜂鳴器/LED連接,在焊接之前。
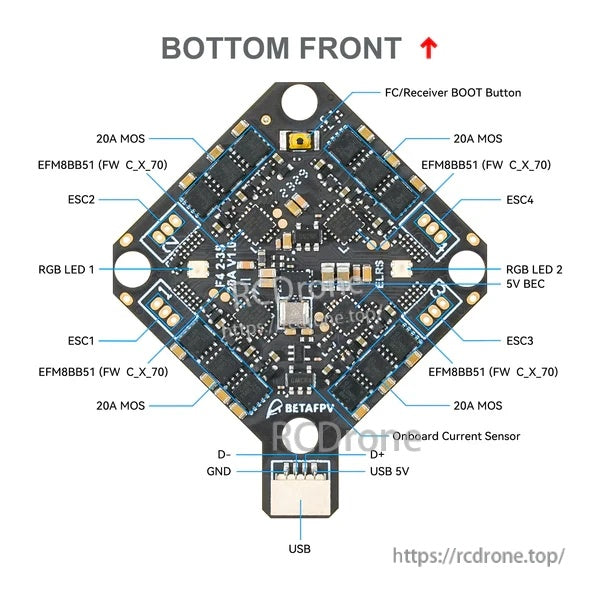
底部佈局突顯了ESC部分、啟動按鈕、RGB LED焊盤、板載電流傳感器和USB接線點。
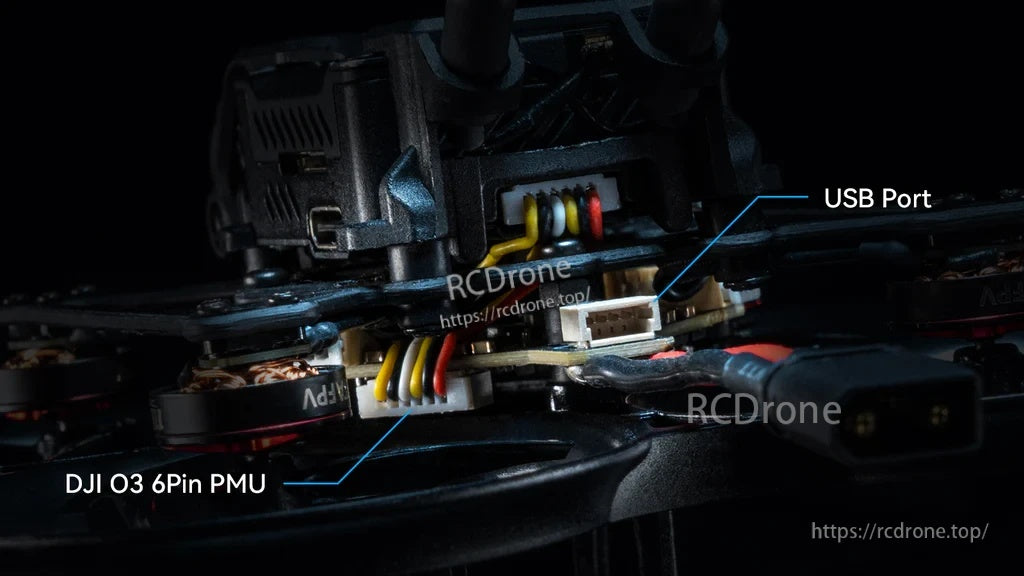
後置USB端口和DJI O3 PMU連接器使緊湊框架上的接線保持整潔。


HD VTX連接器默認設置為9V,通過小的焊接更改可選擇5V選項。

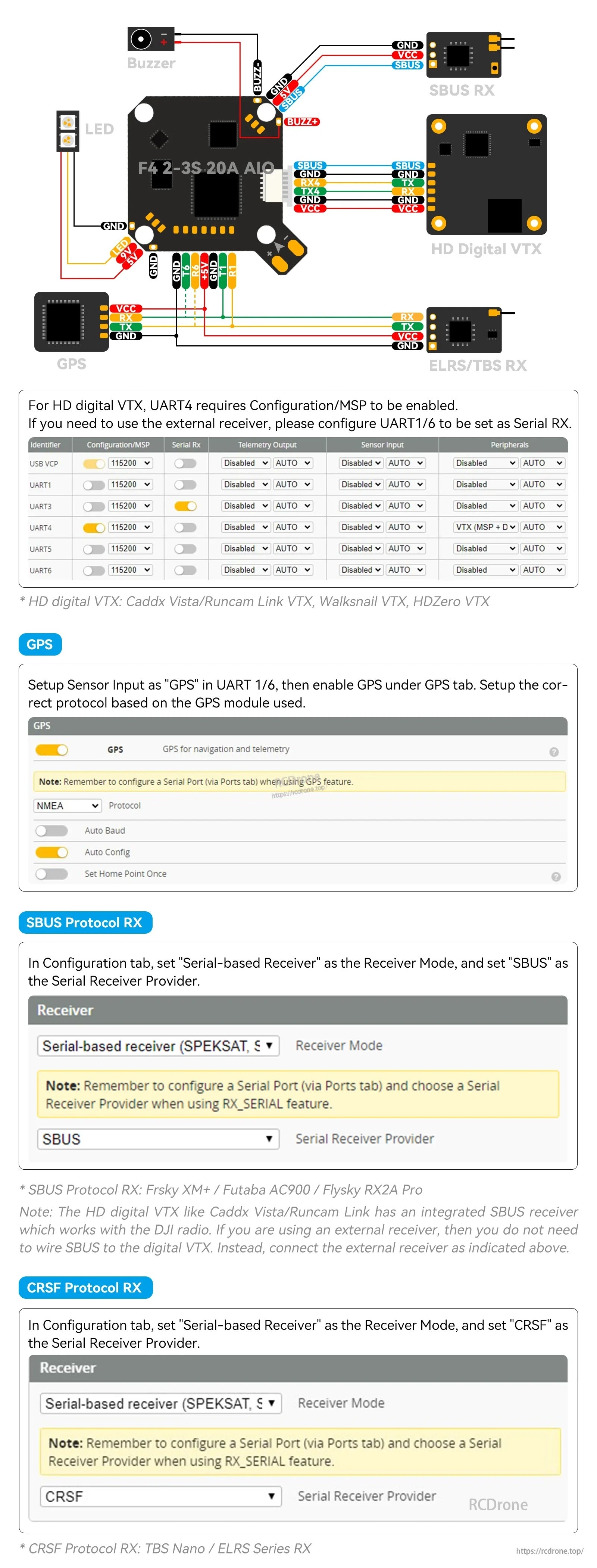
一個接線範例和 Betaflight 接收器設置指南簡化了數位 VTX 構建和串行接收器配置的設置。

Related Collections


