F450-4B Raspberry Pi 可編程無人機開發套件 - Pixhawk DIY Ardupilot 工業開源無人機平台
F450-4B Raspberry Pi 可編程無人機開發套件 - Pixhawk DIY Ardupilot 工業開源無人機平台
RCDrone
無法載入取貨服務供應情況
概述
這 F450-4B 樹莓派無人機 是一種先進的 DIY 無人機套件 結合了強大的 樹莓派4B 具有多功能功能的機載計算機 Pixhawk 2.4.8 飛行控制器,使其成為高度可自訂的和 可編程無人機 平台。這 開源無人機平台 支援尖端工具,例如 Dronekit-python,使開發人員能夠創建自主任務、即時資料傳輸和人工智慧驅動的影像處理應用程式。 F450 無人機套件擁有堅固的 450mm 框架、200MP 高清攝影機、可飛行長達 20 分鐘的 3S 5200mAh 電池以及高度保持、返航和繞圈模式等高級飛行模式,是您的理想選擇尋求創新無人機開發體驗的愛好者、研究人員和教育工作者。
主要特點
高效能硬體
- 樹莓派4B:搭載 64 位元 1.5GHz 四核心處理器,支援 4K 視訊輸出和高速 WiFi 通信,運作可靠。
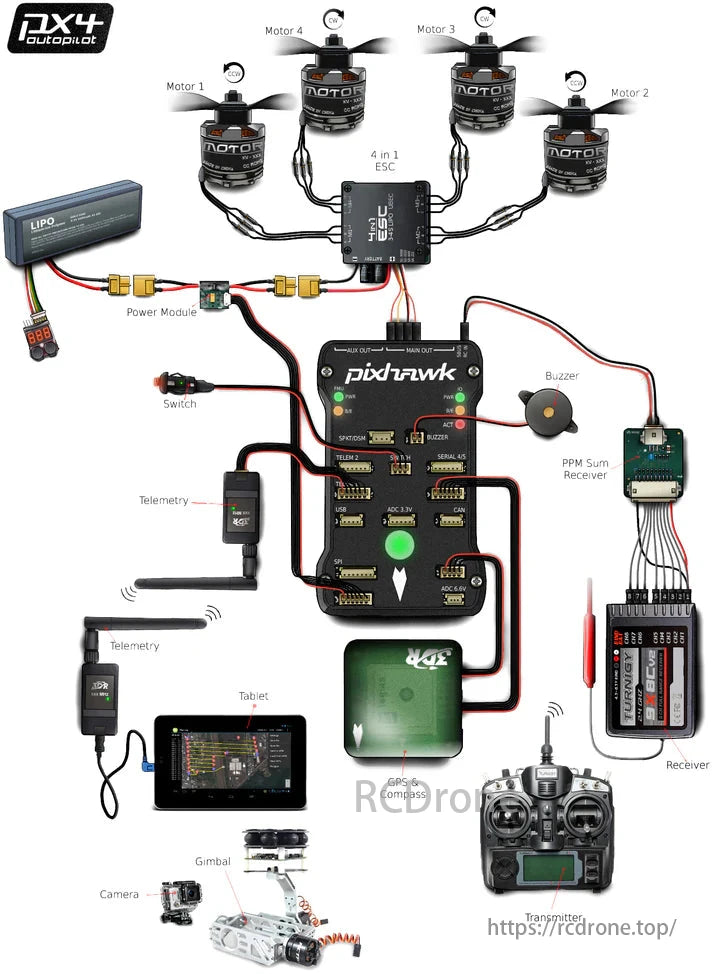
- Pixhawk 2.4.8 飛行控制器:配備多個整合式感測器,確保精確的姿態控制、懸停和任務規劃。
- 視野擴展支援:搭配單眼相機和OpenCV工具,套件滿足即時影像傳輸和處理需求。
多種飛航模式
- 高度保持 (AltHold):保持穩定的飛行高度。
- 徘徊:提供精確的固定懸停。
- 回到家(返回):訊號遺失或電量不足時自動返回起點。
- 著陸(陸地):執行平穩的自主著陸。
- 穩定模式:自動調整飛行姿態。
- 循環模式:圍繞目標進行環形飛行。
- 無頭模式:消除方向限制以便於控制。
- 失控回歸:訊號遺失時返回預設位置。
- 低功率著陸:在電池電量不足的情況下安全著陸。
資料傳輸和影像處理
- 透過內建熱點建立本地WiFi網絡,無需外部路由器,實現資料和影像的即時傳輸。
- 支援基於OpenCV的視訊串流和分析,非常適合影像監控和智慧應用。
規格
無人機參數
| 範圍 | 細節 |
|---|---|
| 姓名 | F450 無人機套件 |
| 軸距 | 450毫米 |
| 重量 | 1493g(含電池和Raspberry Pi 4B) |
| 飛行控制器 | 像素鷹 2.4。8個開源飛控 |
| 機上電腦 | 樹莓派4B |
| 相機 | 200MP 高清 1080P |
| 懸停支持 | 光流模組和雷射距離感測器 |
| GPS模組 | m8n GPS |
| 飛行時間 | 約 20 分鐘(取決於環境和任務) |
| 電池 | 3S 5200mAh(11.1V) |
| 有效負載能力 | 500克 |
| 抗風能力 | 3-4級 |
| 引擎 | 晴天A2212 |
| ESC鍵 | 好盈20A電調(支援3S-4S鋰電池) |
| 螺旋槳 | T1045自鎖螺旋槳 |
| 最大海拔高度 | 2000m(無幹擾) |
| 飛行範圍 | 1000米 |
| 飛行場景 | 室內/室外 |
Pixhawk 2.4.8 飛控規格
- 處理器:32位元ARM STM32F427 Cortex M4,168MHz,256KB RAM
- 感應器:
- L3GD20 3軸6自由度陀螺儀
- LSM303D 3軸14位元加速度計/磁力計
- MPU6000 6軸加速度計/磁力計
- MS5611高精度氣壓計
- 地面控制相容性:QGroundControl、任務規劃器
- 方面:81毫米×47毫米×16毫米;重量:37克
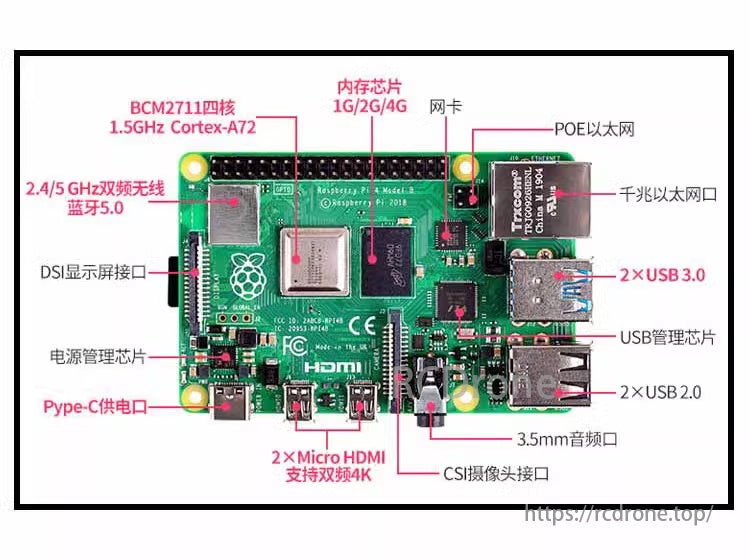
樹莓派 4B 規格
- 晶片組:博通 BCM2711
- 中央處理器:64位1.5GHz四核
- 圖形處理器:500MHz VideoCore VI
- 記憶體:4GB DDR4
- 介面:2 個 USB 3.0、2 個 USB 2.0
- 視訊輸出:雙微型 HDMI 端口,支持 4K@60Hz
- 溝通:藍牙5.0、WiFi 5(2.4/5GHz)
- 電源:USB Type-C(5V 3A)
套餐內容
設定1:SunnySky A2212馬達搭配FlySky i6遙控與遙測
- F450 機架附起落架
- SunnySky A2212馬達(4個)
- 好盈20A電調(4個)
- T1045自鎖螺旋槳(4對)
- PIX M8n GPS 模組
- 減振板
- 飛天i6遙控器
- 3S 5200mAh電池
- B3平衡充電器
- GPS安裝座
- FS電壓遙測模組

包括: 電池紮帶、尼龍紮帶、木墊、3M膠帶、蜂鳴器、安裝工具
組裝調試影片、相關資料提供;聯絡客服取得原始碼。
配置2:帶Radiolink PRO的SunnySky A2212電機
- F450 機架附起落架
- SunnySky A2212馬達(4個)
- 好盈20A電調(4個)
- 9450自鎖螺旋槳(3對)
- PIX。M8n GPS 模組套件
- 減振板
- Radiolink PRO(R9DS接收器)
- 3S 2200mAh控制電池
- 3S 5200mAh電池
- B3平衡充電器
- GPS安裝座

包括: 電池紮帶、尼龍紮帶、木墊、3M膠帶、蜂鳴器、安裝工具
組裝調試影片、相關資料提供;聯絡客服取得原始碼。
F450 無人機套件組裝
應用場景
F450-4B 無人機開發套件非常適合:
- 無人機研發:大學研究、飛控測試、演算法開發。
- 智慧應用:路徑規劃、目標辨識、避障。
- 教育實驗:編程、硬體組裝和調試。
- 現場使用:室內懸停、室外測量、農業監測等。
細節
F450-4B Raspberry Pi 無人機開發平台
F450是經典常用無人機型號,組裝簡單方便,性價比高,實用性強,適合初學者快速上手無人機操作。

升級版樹莓派4B
樹莓派4B硬體處理能力明顯強於3B+。
Raspberry Pi配備了最新的開源系統 烏班圖20.04,相較於Ubuntu Mate系統提供更流暢的體驗。

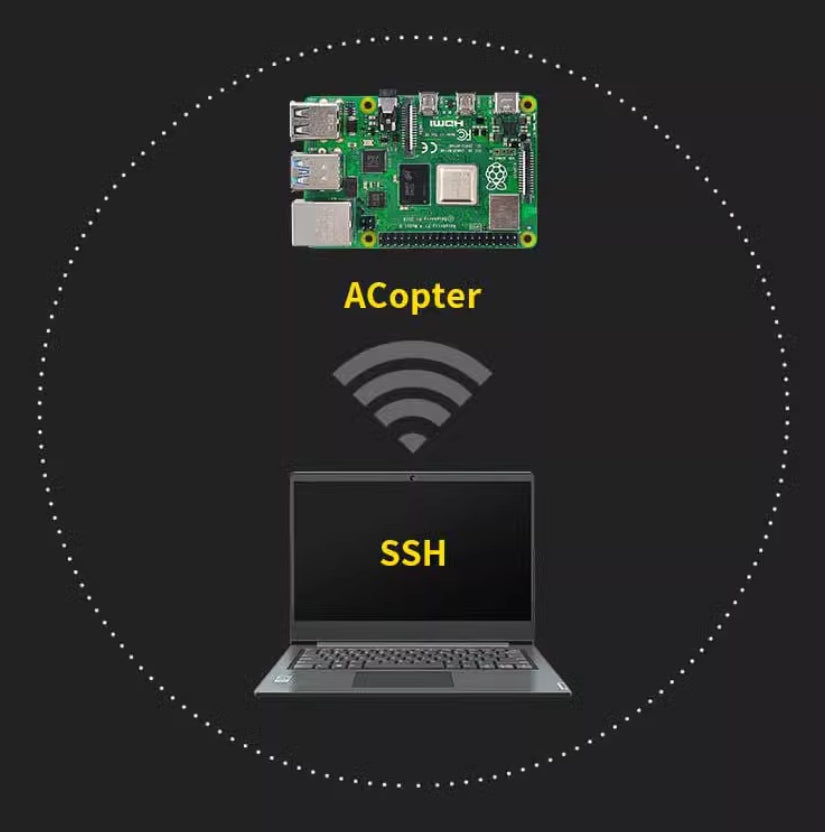
系統啟用的 WiFi 熱點 (Acopter)
利用樹莓派4B的WiFi功能,創造一個自建熱點(Acopter)。 PC可以直接連接4B的WiFi熱點組成本地網絡,並使用SSH指令遠端存取樹莓派。與需要路由器進行網路配置的 3B+ 型號不同,此設定對於初學者來說更加簡單且更用戶友好。
OpenCV 視覺處理
新增單眼相機,實現影像傳輸和後製。視訊串流可以透過 Raspberry Pi 擷取並使用 OpenCV 等工具進行處理。即時高清視訊串流還可以傳輸回 PC 進行處理或傳輸到行動裝置進行觀看。

更多擴充介面
Raspberry Pi 4B 提供多種擴充接口,包括雙 USB 3.0 連接埠、雙 4K micro HDMI 連接埠、CSI 和 DSI 介面、千兆乙太網路和 Type-C 電源,為各種應用提供卓越的多功能性。
單攝版
單相機版本包括 Raspberry Pi 4B 和單眼相機,可透過序列埠與飛行控制器進行通訊。它支援視覺處理、Python 程式設計和通訊等任務。此版本適合具有使用 Pixhawk 經驗、具有 Ubuntu (Linux)、OpenCV、Raspberry Pi 和區域網路通訊基礎知識的使用者。
除了基本功能外,單鏡頭版本還支援透過 WiFi 傳輸影像和數據,並允許透過 Dronekit-python 程式設計.

光流定位
光流定位條件下Dronekit-python室內懸停控制

該無人機開發平台支持 活性氧, Python程式設計, OpenCV影像辨識, 4G遠距離傳輸, 和 Aruco二維碼視覺引導著陸,使其具有高度的通用性和創新性。

富天i6遙控器
配備預先安裝10通道韌體的ia6b接收器、電壓遙測模組,遙控器範圍超過1000m,非常適合初學者學習和練習。

樂迪AT9S遙控器
具有10個通道,控制範圍超過2000m。配備遙測模組,可提供電池電壓、GPS衛星數、飛行高度、座標、飛行模式等數據。

常問問題
1.可以進行二次開發嗎?可以獨立編程嗎?
答案是肯定的。如前所述,Ardupilot是目前應用最廣泛的開源飛控系統,國內外許多優秀的無人機模型都是基於該系統開發的。
二次開發主要有飛控開發和外部擴展兩個方向。
- 飛行控制開發
我們使用的是Ardupilot,所以學習開源飛控開發主要就是學習Ardupilot開源專案。
- 需要強大的程式設計技能(原始碼為 C++),以及高等數學知識(離散數學、迭代、線性化)、卡爾曼濾波和嵌入式開發。
- 需要紮實的理論基礎。這為您從事無人系統開發和飛行控制研發工作做好了準備。
如果你想專注於飛控開發,大部分工作都需要在你的電腦上完成:
- 建置程式設計環境、下載飛控原始碼、研究其架構和功能模組等。
- 熟悉了程式碼框架後,就可以根據現有程式碼開始程式設計了。
從基本的飛控模型開始,參考我們提供的Ardupilot飛控教材進行指導。
- 外部拓展開發
外部擴充功能可讓您根據任務和場景,透過飛控預留介面新增外部設備。例如:
- 添加光流模組,用於室內定位懸停。
- 添加光達以避障。
- 使用遙測技術實現自主飛行和航線規劃。
- 安裝機載電腦(例如Raspberry Pi)並使用Dronekit-Python或ROS進行程式設計以控制無人機。
新增機載計算機的目標是處理更複雜的任務,例如:
- 使用Raspberry Pi攝影機進行視覺辨識(需要OpenCV、YOLO等)。
- 結合通訊協定來控制無人機的飛行。
- 透過網路傳輸飛行數據或高清視訊。
這些功能僅依靠飛控是無法實現的。
研究外擴主要以應用為主,這也是全國大多數競賽的方向。學習後,您可以探索智慧無人機的關鍵領域,例如視覺識別、人工智慧與無人機的整合等。
2、自主開發的前提是什麼?
了解無人機是一個循序漸進的過程。無人機系統是跨學科和綜合性的,涉及廣泛的知識領域。要學習無人機開發,需要具備以下基礎:
- 基本的動手技能,包括熟練使用烙鐵、各種螺絲起子和其他工具。
- 電子學基礎:電壓、電流、功率、極性、訊號等概念。
- 自動化控制基礎:PID控制、回饋、數位訊號、類比訊號等。
- 電腦基礎:驅動程式、串列埠、波特率、韌體版本、軟體版本。
- Pixhawk 無人機的基本知識。
- Ubuntu 作業系統的基本知識。
- 程式語言熟練度:如C++、Python。
如何製作Respberry PI無人機?