







Feetech STS3215 - 7.4V 20KG 360° 25T 磁編碼器 序列匯流排舵機 多轉舵機 高精度步進模式舵機
Feetech STS3215 - 7.4V 20KG 360° 25T 磁編碼器 序列匯流排舵機 多轉舵機 高精度步進模式舵機
Feetech
定價
$25.31 USD
定價
售價
$25.31 USD
單價
每
已包含稅額。
結帳時計算運費。
無法載入取貨服務供應情況
Feetech STS3215 - 7。4V 20KG 360°舵機規格
品牌名稱:Feetech
產地:中國大陸
材質:塑膠
塑膠型:PC
遙控零件和配件:電池 - 鋰電池
尺寸:10*10*10
對於車輛類型:汽車
使用:車輛與遙控玩具
升級零件/配件:鋰電池
遠端控制週邊設備/設備:遙控器
工具用品:電池
數量:1 件
技術參數:KV1100
型號:STS3215
四輪驅動屬性:馬達
軸距:螺絲
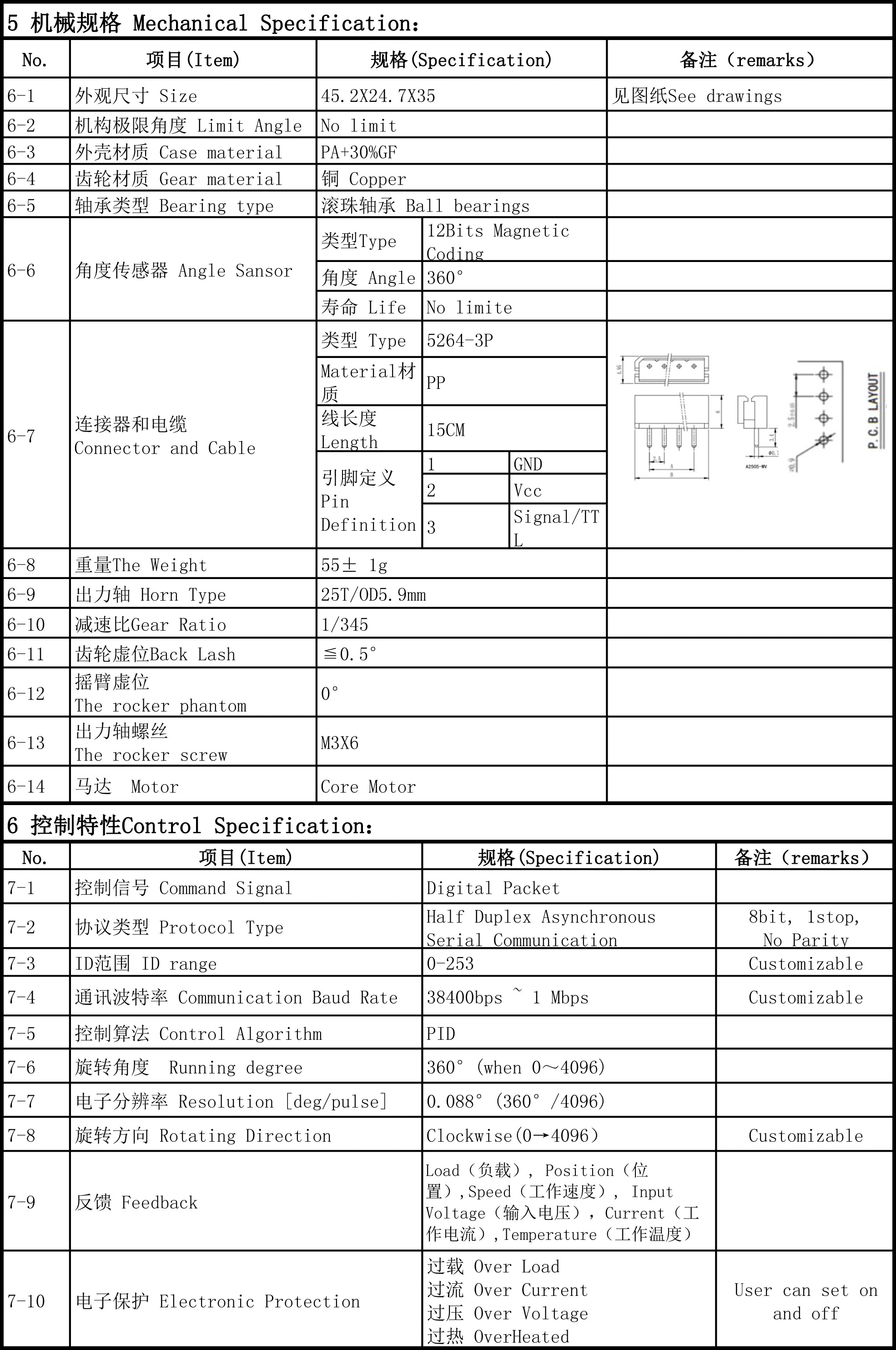
型號:STS3215
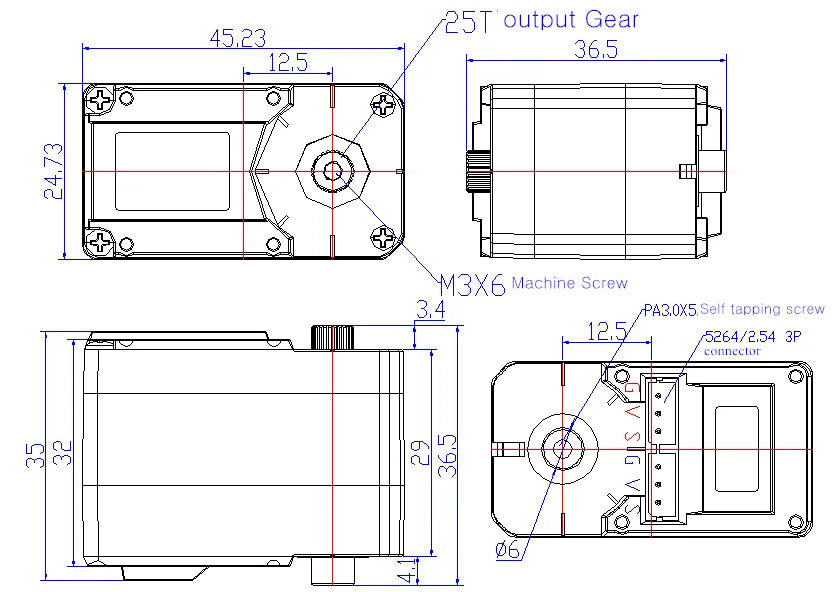
大小:45。2×24。7×35毫米
重量:55±1g
齒輪型:銅
限制角度:無限制
軸承:滾珠軸承
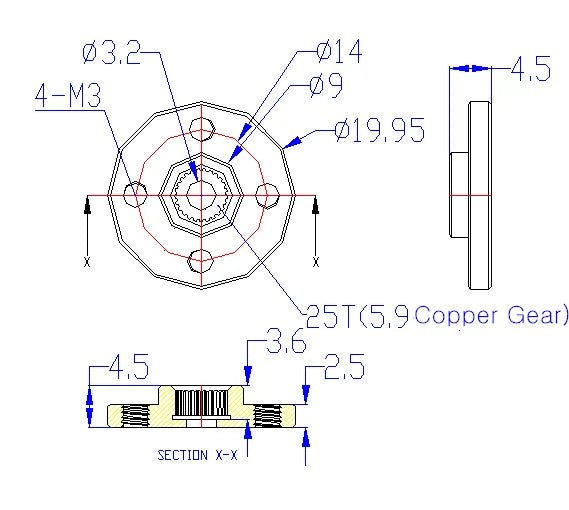
喇叭齒輪花鍵:25T
馬達:空心杯馬達
工作電壓範圍:6-7。4V
峰值失速扭力:19。5公斤。厘米@6V
額定扭力:6。5公斤。厘米@6V
協定類型:半雙工非同步串列通訊
|
產品名稱
|
Feetech 2020新產品STS3215磁編碼器360°序列匯流排伺服評估
|
|
尺寸
|
45。2X24。7X35mm
|
|
重量
|
55±1g
|
|
失速扭力
|
19。5公斤。厘米@7。4V
|
|
失速速度
|
52RPM@7。4V
|
|
回饋
|
負載/位置/速度/電壓/電流/溫度
|
|
電子保護
|
過熱/過流/過壓/過載保護
|
|
專注於ODM和OEM
|
Y
|
|
壽命測試
|
>100000
|
|
馬達噪音
|
45±5dB
|
|
轉向器雜訊
|
60±5dB
|
|
防水性能
|
否
|
|
協定類型
|
半雙工非同步串列通訊
|
-
結構特徵:
-
外殼採用強度更高的工程塑膠外殼,優化中心距,整體結構更緊湊,舵機齒輪採用1:345銅齒輪組合,扭力更高;相同扭力下,與標準舵機相比尺寸,外觀較低矮(5mm),機身採用雙軸結構設計,圓線排列實心的結構特點,雙出線配金屬主副舵角的接線方式,適合四足機器人、蛇類應用機器人、桌面機器人、仿人機器人和機械手臂。
我們的產品已通過CE和ROHS認證,大部分已申請外觀專利和實用新型專利

專業從事 ODM 和 OEM 和定制 1.您的商標標籤或印刷品
2。伺服線
3.包裝:PE袋,彩盒,塑膠盒,帶有
您的標誌
4。電纜連接器
5.客製化各種寬工作電壓舵機
2。伺服線
3.包裝:PE袋,彩盒,塑膠盒,帶有
您的標誌
4。電纜連接器
5.客製化各種寬工作電壓舵機
產品用途
電子控制功能:
1.加速啟動停止功能:速度和加速度值可設定,運動效果更平緩。
2。高精度,360度絕對位置4096位元精度,最高位置解析度為0。088度,如果控制為90度,則輸入4096 / 360 * 90 = 1024,如果控制為180度,則輸入4096 / 360 * 180 = 2048,以便計算。
3。有四種工作模式切換(模式0位置伺服、模式1速度閉環、模式2速度開環、模式3步進伺服)。
1)、Mode 0:定位模式,預設模式。 此模式下可實現360度絕對角度控制。 支持加速運動。
2)、模式1:速度閉環,在程式介面中,運行模式設定為1,切換到速度閉環模式,在速度欄輸入對應的速度即可運作。
3)、模式2:速度開環,在程式介面中,運作模式設定為2,切換到速度開環模式,在時間欄輸入對應的時間即可運作。
4)、Mode3:步進模式:在程式介面中,最大/最小角度限制設定為0,運行模式設定為3。 切換到步進模式。 在位置欄中輸入位置即可邁向目標位置。 再次按一下該位置可繼續朝同一方向邁進。
4、多圈模式,360度絕對控制與回授,最高精度下,絕對位置控制可正負7圈,但不保存通電次數,只保存絕對位置回授值保留。
5、一鍵校準,360度任一位置角度安裝,(40(十進位)位址輸入128(十進位))一鍵校正目前位置為中間(2048(十進位))。
6、TTL通訊電平,半雙工非同步通訊,匯流排協定支援調整讀寫參數,增加同步讀取功能(發送指令依序接收總線上各舵機的回讀指令) 。)
7、多重保護,(過載、過流、過壓、過熱、開關設定、條件參數改變)
1)、過載保護:透過位置偵測,在從啟動開始的運動過程中位置到目標位置,遇到障礙物阻擋後偵測到目前位置不是目標位置時,卸載力持續2S(預設阻擋力的20%)。 直到新的指令觸發,解除保護
2)、過電流保護:透過設定的電流值,檢查電流是否達到設定的電流值。 當達到設定電流值時,釋放力(預設扭力為0)。 直到新的指令觸發,解除保護
3)、過壓保護:偵測目前電壓值。 如果超過設定的電壓值,則會顯示過壓警報。
4)、過熱保護:偵測目前馬達溫度。 如果溫度超過設定值,則會顯示過熱警報。
8:多重回授:
1)負載回饋:電流控制輸出驅動馬達的電壓佔空比,滿量程為1000 = 100%扭力輸出。
2)電流回饋:伺服工作電流,1=6。5mA
3)電壓回授:舵機工作電壓,70=7V,0.1V
4)溫度回饋:目前舵機內部工作溫度(測量溫度)。 >9、開啟PID參數。
1.加速啟動停止功能:速度和加速度值可設定,運動效果更平緩。
2。高精度,360度絕對位置4096位元精度,最高位置解析度為0。088度,如果控制為90度,則輸入4096 / 360 * 90 = 1024,如果控制為180度,則輸入4096 / 360 * 180 = 2048,以便計算。
3。有四種工作模式切換(模式0位置伺服、模式1速度閉環、模式2速度開環、模式3步進伺服)。
1)、Mode 0:定位模式,預設模式。 此模式下可實現360度絕對角度控制。 支持加速運動。
2)、模式1:速度閉環,在程式介面中,運行模式設定為1,切換到速度閉環模式,在速度欄輸入對應的速度即可運作。
3)、模式2:速度開環,在程式介面中,運作模式設定為2,切換到速度開環模式,在時間欄輸入對應的時間即可運作。
4)、Mode3:步進模式:在程式介面中,最大/最小角度限制設定為0,運行模式設定為3。 切換到步進模式。 在位置欄中輸入位置即可邁向目標位置。 再次按一下該位置可繼續朝同一方向邁進。
4、多圈模式,360度絕對控制與回授,最高精度下,絕對位置控制可正負7圈,但不保存通電次數,只保存絕對位置回授值保留。
5、一鍵校準,360度任一位置角度安裝,(40(十進位)位址輸入128(十進位))一鍵校正目前位置為中間(2048(十進位))。
6、TTL通訊電平,半雙工非同步通訊,匯流排協定支援調整讀寫參數,增加同步讀取功能(發送指令依序接收總線上各舵機的回讀指令) 。)
7、多重保護,(過載、過流、過壓、過熱、開關設定、條件參數改變)
1)、過載保護:透過位置偵測,在從啟動開始的運動過程中位置到目標位置,遇到障礙物阻擋後偵測到目前位置不是目標位置時,卸載力持續2S(預設阻擋力的20%)。 直到新的指令觸發,解除保護
2)、過電流保護:透過設定的電流值,檢查電流是否達到設定的電流值。 當達到設定電流值時,釋放力(預設扭力為0)。 直到新的指令觸發,解除保護
3)、過壓保護:偵測目前電壓值。 如果超過設定的電壓值,則會顯示過壓警報。
4)、過熱保護:偵測目前馬達溫度。 如果溫度超過設定值,則會顯示過熱警報。
8:多重回授:
1)負載回饋:電流控制輸出驅動馬達的電壓佔空比,滿量程為1000 = 100%扭力輸出。
2)電流回饋:伺服工作電流,1=6。5mA
3)電壓回授:舵機工作電壓,70=7V,0.1V
4)溫度回饋:目前舵機內部工作溫度(測量溫度)。 >9、開啟PID參數。
FEETECH 7。4V 20公斤CM塑殼金屬齒輪磁編碼器雙軸TTL序列匯流排伺服
詳細圖片












