

高扭力 HTDW-5047-36-NE-JC 馬達,36:1 減速機,額定扭矩 4Nm,14位編碼器,12-48V
高扭力 HTDW-5047-36-NE-JC 馬達,36:1 減速機,額定扭矩 4Nm,14位編碼器,12-48V
HIGH TORQUE
定價
$308.80 USD
定價
售價
$308.80 USD
單價
每
已包含稅額。
結帳時計算運費。
無法載入取貨服務供應情況
概述
該高扭矩 HTDW-5047-36-NE-JC 馬達是一個緊湊的齒輪馬達模組(交叉滾子版本),專為機器人和自動化系統中的精確低速、高扭矩運動控制而設計。
應用
- 人形機器人
- 機器手臂
- 外骨骼
- 四足機器人
- 自動導引車輛
- ARU 機器人
主要特點
- 型號識別顯示:HTDW-5047-36-JC / HTDW-5047-36-NE-JC
- 減速比:36
- 提供低回程和定位精度參數以便於減速器/模組整合
- 14位輸入編碼器解析度和14位輸出編碼器解析度
- 快速響應時間:≤200微秒
- 控制頻率:3kHz
如需售前和整合支持,請聯繫https://rcdrone.top/ 或發送電子郵件至[email protected].
規格
| 長度和寬度 | 60mm |
| 高度 | 52.4mm |
| 重量 | 374g |
| 背隙 | <10弧分 |
| 重複定位精度 | <12弧分 |
| 絕對定位精度 | <15弧分 |
| 扭矩常數 | 0.062Nm/A |
| 極對數 | 14 |
| 減速比 | 36 |
| 鎖定轉矩 | 21Nm |
| 空載轉速 | 60RPM |
| 額定轉矩 | 4Nm |
| 額定轉速 | 40RPM |
| 評級 | 17W |
| 電壓範圍 | 12-48V |
| 峰值電流 | 10A |
| 速度控制精度 | ±15% |
| 輸入編碼器解析度 | 14位 |
| 波特率 | 5Mbps |
| 額定電流 | 2A |
| 控制精度 | ±15% |
| 響應時間 | ≤200us |
| 輸出編碼器解析度 | 14位元 |
| 控制頻率 | 3kHz |
手冊 & 文件
- 高扭矩馬達調試助手用戶手冊 (PDF)
- 調試手冊 (PDF)
- 1.2 fdcan 協議分析 (PDF)
- 用戶手冊 (PDF)
- 高扭矩 HTDW-5047-36-NE-JC 馬達 3D 模型 (STP, ZIP)
詳細資訊

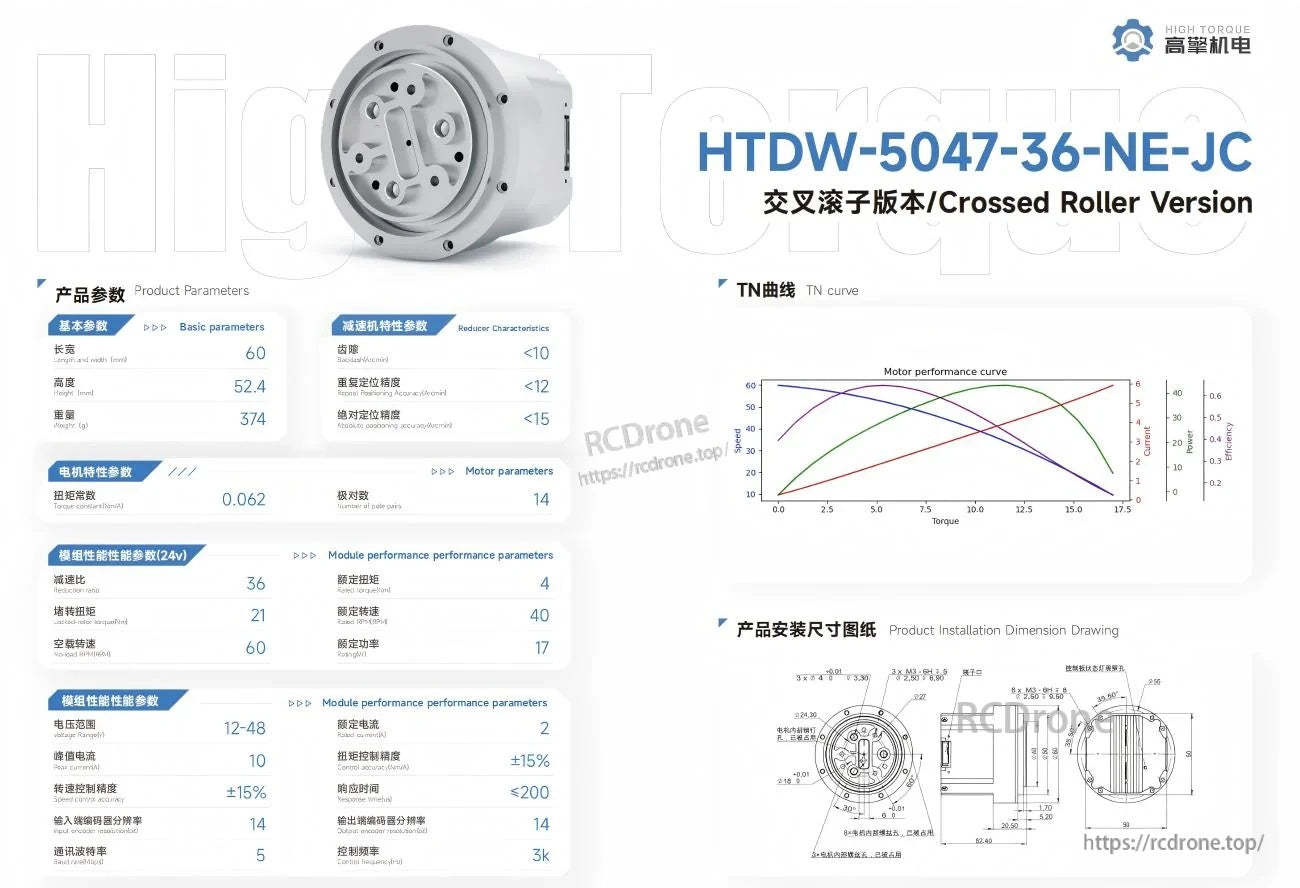
交叉滾子減速機模組概述,包括關鍵參數、馬達性能曲線和安裝尺寸圖,以便進行整合規劃。

