Holybro DroneCAN M8N GPS模組-STM32G4處理器BMM150指南針3GNSS支援DroneCAN協議
Holybro DroneCAN M8N GPS模組-STM32G4處理器BMM150指南針3GNSS支援DroneCAN協議
HolyBro
定價
$98.00 USD
定價
售價
$98.00 USD
單價
每
已包含稅額。
結帳時計算運費。
無法載入取貨服務供應情況
描述
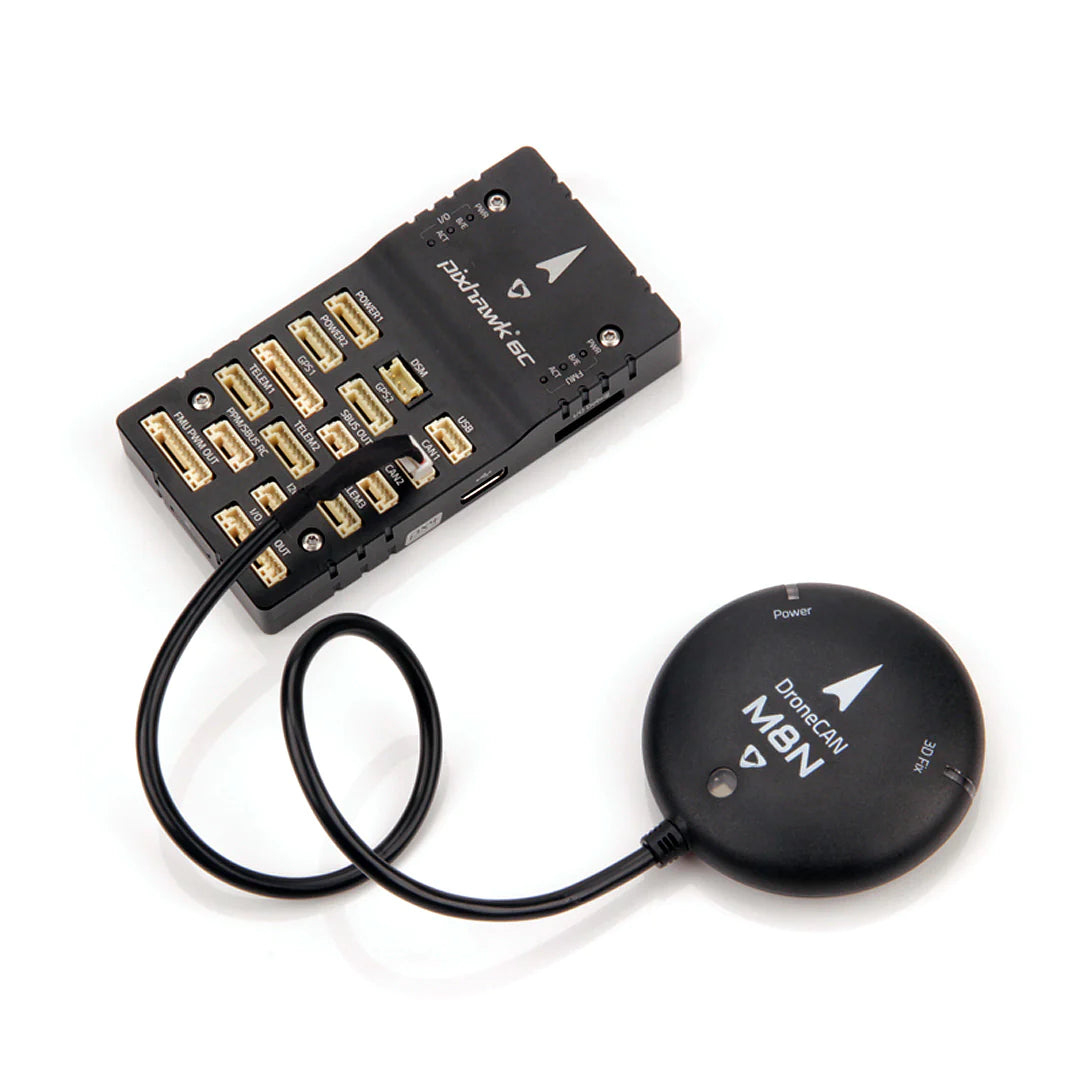
Holybro DroneCAN GPS 具有 UBLOX M8N 或 M9N 模組、BMM150 指南針、三色 LED 指示燈。它具有STM32G4處理器,並採用DroneCAN協定進行通信,使其比串行連接更可靠,並且更好地應對電磁幹擾。不佔用飛控任何串口,不同的CAN設備可以透過CAN分線板連接到同一條CAN總線上。
規格:
| DroneCAN M8N | |
| GNSS 接收器 | Ublox NEO M8N |
| 併發 GNSS 數量 | 最多 3 隻 GNSS(GPS、Galileo、GLONASS、北斗) |
| 處理器 | STM32G4(170MHz,512K 快閃記憶體) |
| 指南針 | BMM150 |
| 頻段 | GPS:L1C/A GLONASS:L10F 北斗:B1I 伽利略:E1B/C |
| GNSS增強系統 | SBAS:WAAS、EGNOS、MSAS、QZSS |
| 導航更新 | 5Hz 預設(最大 10Hz) |
| 準確度 | 2.5m |
| 速度精度 | 0.05 m/s |
| 最大衛星數 | 22+ |
| 通訊協定 | DroneCAN @ 1 Mbit/s |
| 支援自動舵韌體 | PX4、Ardupilot |
| 連接埠類型 | GHR-04V-S |
| 天線 | 25 x 25 x 4 mm 陶瓷貼片天線 |
| 功耗 | 小於 200mA @ 5V |
| 電壓 | 4.7-5.2V |
| 工作溫度 | -40~80C |
| 尺寸 | 直徑:54mm 厚度:14.5mm |
| 重量 | 36g |
| 電纜長度 | 26cm |
| 其他註解 | - LNA MAX2659ELT+ 射頻放大器 - 可充電法拉電容 - 低雜訊 3.3V 穩壓器 |
有關其他技術信息,請訪問https://docs.holybro.com/
DroneCAN
DroneCAN 是 ArduPilot 和 PX4 專案用於與 CAN 週邊通訊的主要 CAN 協定。它是一個開放協議,具有開放的通訊、規範和多種開放的實現。
DroneCAN 開發
DroneCAN 專案擁有活躍的開發社群。
- https://dronecan.org/discord 中關於不和諧的討論
- 在 github 上進行開發:https://github.com/DroneCAN