Holybro Pixhawk 5X 自動駕駛飛行控制器
Holybro Pixhawk 5X 自動駕駛飛行控制器
HolyBro
無法載入取貨服務供應情況
Pixhawk® 5X 是成功系列的最新更新 皮克斯霍克® 飛行控制器,基於 Pixhawk® FMUv5X 開放標準和 Pixhawk® 自動駕駛儀匯流排標準。 它預先安裝了最新的 PX4 Autopilot®®、三重冗餘、溫度控制、隔離感測器域,提供令人難以置信的性能和可靠性。
在Pixhawk® 5X 內部,您可以找到基於STMicroElectronics® 的STM32F7,與Bosch®、InvenSense® 的傳感器技術相結合,為您提供控制任何自動駕駛車輛的靈活性和可靠性,適用於學術和商業應用。 Pixhawk® 5X 的 F7 微控制器具有 2MB 快閃記憶體和 512KB RAM。 PX4 Autopilot 利用了增強的功率和 RAM。由於更新的處理能力,開發人員可以提高開發工作的生產力和效率,從而允許複雜的演算法和模型。
FMUv5X 開放標準包括高性能、低噪音的板載 IMU,旨在實現更好的穩定性。獨立總線上的三冗餘 IMU 和雙冗餘氣壓計。當 PX4 自動駕駛儀偵測到感測器故障時,系統會無縫切換到另一個感測器以保持飛行控制的可靠性。
獨立的 LDO 透過獨立的電源控制為每個感測器組供電。全新設計的隔振裝置可濾除高頻振動並降低噪音,確保讀數準確,使飛行器達到更好的整體飛行性能。 外部感測器匯流排(SPI5) 具有兩個片選線和資料就緒訊號,用於具有SPI 介面的附加感測器和有效負載,並具有整合的Microchip 乙太網路PHY (LAN8742AI-CZ-TR),可透過乙太網路與任務計算機進行高速通訊現在已支援。兩個智慧電池監控連接埠(SMBus),支援INA226 SMBus電源模組。
Pixhawk® 5X 非常適合企業研究實驗室、新創公司、學術界(研究人員、教授、學生)和商業應用的開發人員。 Pixhawk 5X 相容 PX4 自動駕駛儀 & Ardupilot 韌體。
筆記:
- Pixhawk 5X 需要 I2C 協議來獲取來自電源模組的電壓和電流數據,例如 PM02D、類比電源模組(PM02、PM06、PM07)與 Pixhawk 5X 不相容。 電源模組比較圖
- 預設情況下,它附帶 PX4 韌體。使用者也可以透過 Mission Planner 或 QGroundControl 刷新韌體來使用 Ardupilot 韌體。
設計重點
- 模組化飛行控制器:獨立的 IMU、FMU 和基礎系統透過 100 針和 50 針 Pixhawk® 自動駕駛儀匯流排連接器連接,專為靈活且可自訂的系統而設計
- 冗餘:獨立總線上的 3 個 IMU 感測器和 2 個氣壓計感測器,即使在發生硬體故障時也允許並行和連續操作
- 三重冗餘域:完全隔離的感測器域,具有獨立的匯流排和獨立的電源控制
- 隔振系統濾除高頻振動並降低噪音,確保讀數準確
- 用於高速任務計算機整合的乙太網路接口
- 自動感測器校準消除了變化的訊號和溫度
- IMU 透過板載加熱電阻進行溫度控制,實現 IMU 的最佳工作溫度
技術規格
- FMU處理器:STM32F765
- 32 位元 Arm® Cortex®-M7,216MHz,2MB 內存,512KB RAM
- IO處理器:STM32F100
- 32 位元 Arm® Cortex®-M3,24MHz,8KB SRAM
- 板載感測器
- 加速/陀螺儀:ICM-20649(硬裝)
- 加速/陀螺儀:ICM-42688P(軟安裝)
- 加速/陀螺儀:ICM-20602 或 BMI088 (軟裝)
- 彈匣:BMM150
- 氣壓計:2x BMP388
電氣數據
- 額定電壓:
- 最大輸入電壓:6V
- USB電源輸入:4.75~5.25V
- 伺服軌輸入:0~36V
介面
- 16- PWM伺服輸出
- Spektrum / DSM 的 R/C 輸入
- 用於 PPM 和 S.Bus 輸入的專用 R/C 輸入
- 專用模擬/PWM RSSI 輸入和 S.總線輸出
- 4個通用串口
- 3.具有全流量控制
- 1 個具有單獨的 1A 電流限制
- 1 條帶 I2C 和附加 GPIO 線,用於外部 NFC 讀取器
- 2 個 GPS 端口
- 1 個完整的 GPS 加安全開關端口
- 1 個基本 GPS 端口
- 1個I2C端口
- 1 個乙太網路埠
- 無變壓器應用
- 100Mbps
- 1路SPI總線
- 2 條片選線
- 2 條資料就緒線
- 1 條 SPI 同步線
- 1 SPI 復位線
- 2 個 CAN 總線用於 CAN 週邊
- CAN 總線具有單獨的靜音控製或 ESC RX-MUX 控制
- 2 個帶 SMBus 的電源輸入端口
- 1個AD&IO口
- 2 個附加類比輸入
- 1 個 PWM/捕捉輸入
- 2 條專用調試和 GPIO 線
機械數據
- 方面
- 飛控模組:38.8 x 31.8 x 14.6mm
- 迷你底板: 43.4 x 72.8 x 14.2 毫米
- 標準底板 v1:52.4 x 103.4 x 16.7mm
- 標準底板 v2A:40.2 x 92.3 x 18.4mm
- 標準底板 v2B:40.2 x 98.3 x 16.9mm
- 重量
- 飛控模組:23g
- 迷你底板:26。8克
- 標準底板 v1:51g
- 標準底板 v2A:58g
- 標準基板 v2B:58g
SKU 11045 包括:
- Pixhawk 5X 飛行控制器模組
SKU 20307/SKU 20320/SKU20310 包含:
- Pixhawk 6X 飛行控制器模組
- 標準底板 v2A/v2B 或迷你底板
- PM02D 高壓電源模組
- 電纜組
- Pixhawk 6X 飛行控制器模組
- 標準底板 v2A/v2B 或迷你底板
- PM02D 高壓電源模組
- 電纜組
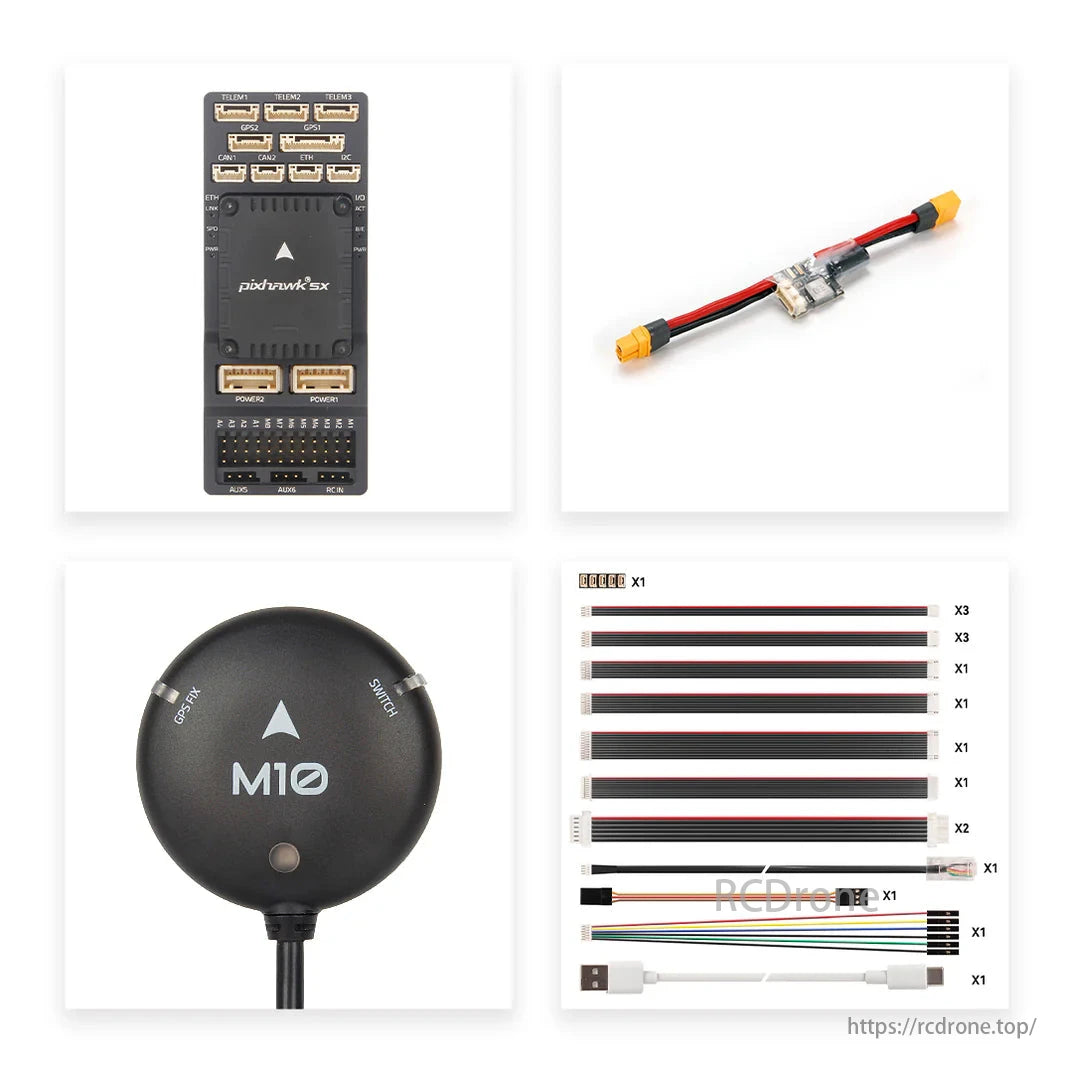
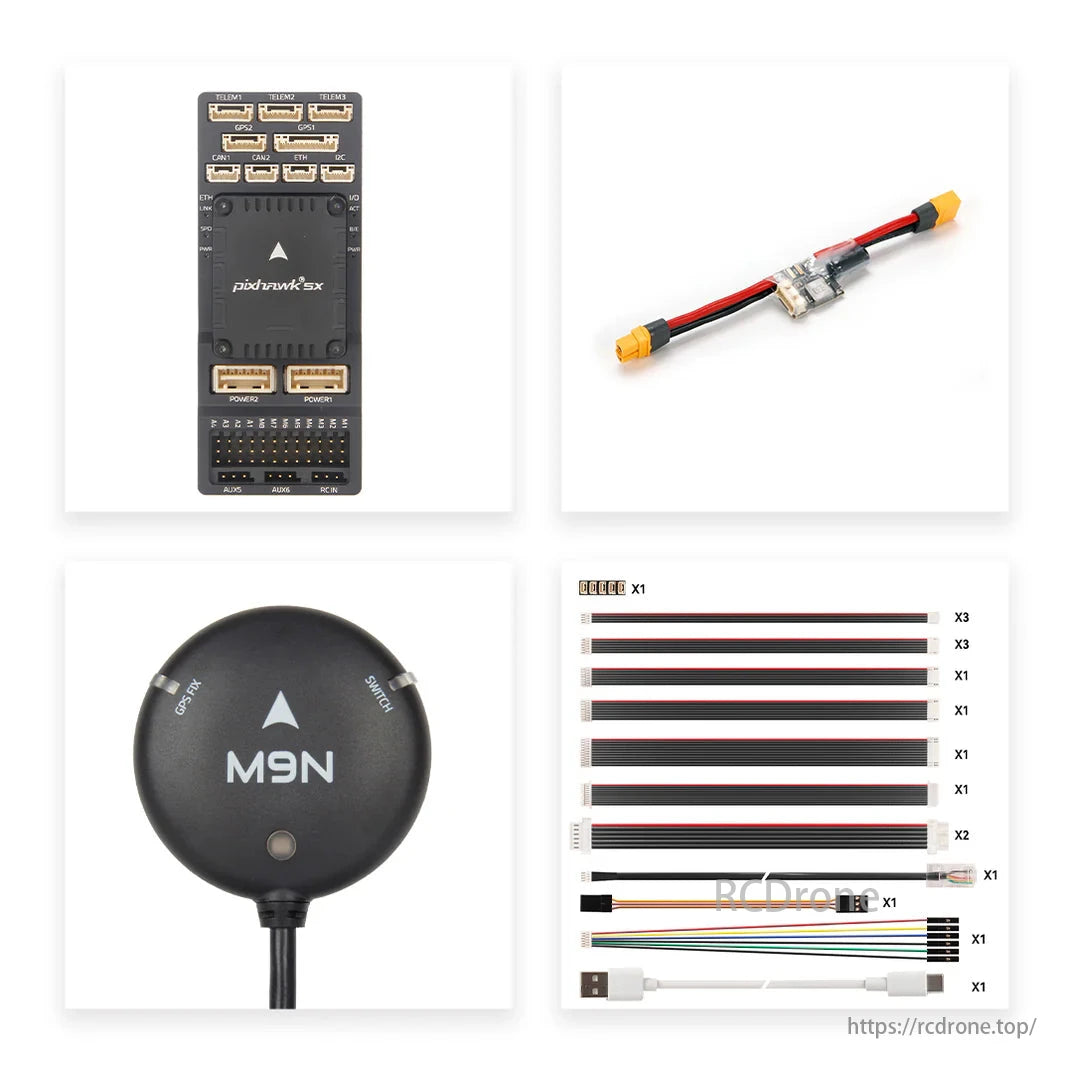
- M9N/M10 全球定位系統
顯示了 Pixhawk mini、Pixhawk Baseboard v1 和 Pixhawk Baseboard v2 的兩個變體(v2A 和 v2B)的尺寸。 mini尺寸為43.4 x 72.8毫米,v1為52 x 101.90毫米,v2A為40.2 x 92.3毫米,v2B為40.2 x 98.3毫米。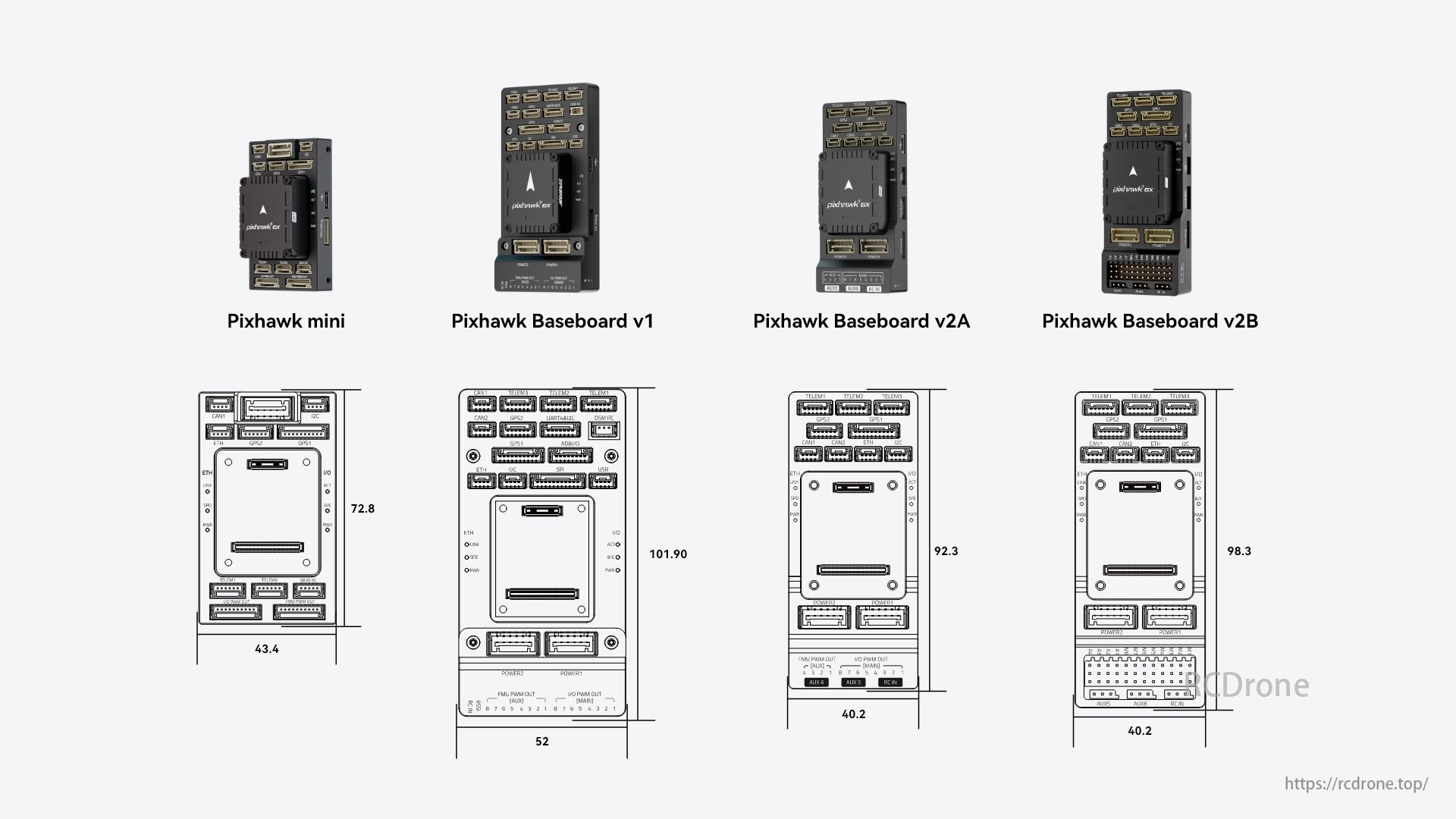
接線範例指南

Holybro Pixhawk 5X 圖包括主要和輔助 GPS、UART4 和 I2C 連接埠、CAN1 和 2、DSM RC 接收器、遙測無線電、高清 FPV IP 攝影機、電池、電源模組、ESC 和配電板。
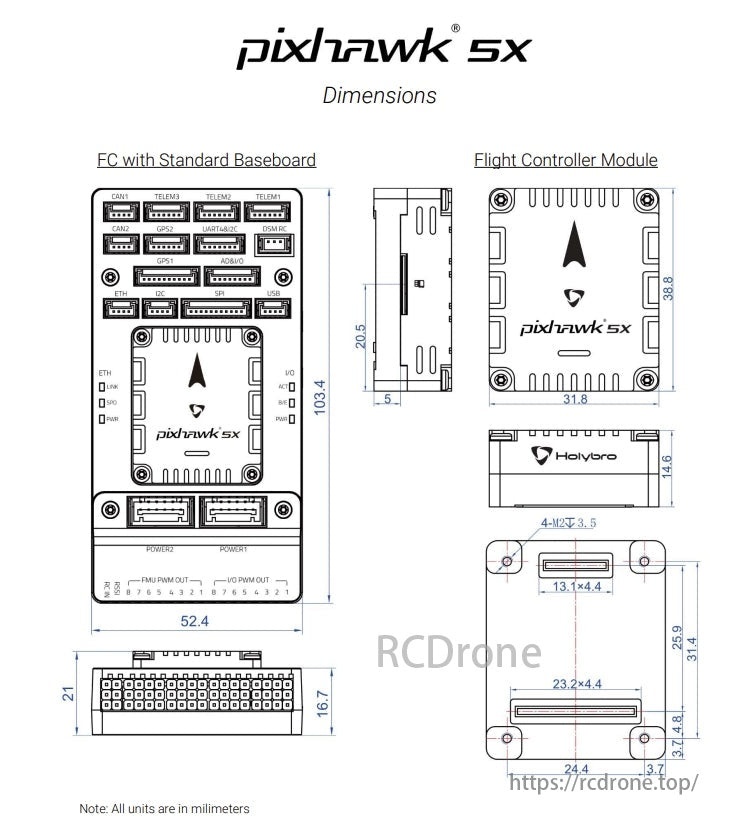
Pixhawk SX 尺寸包含飛行控制器模組和帶有標準基板的 FC。此模組尺寸為 31.8 x 38.8 毫米,而基板尺寸為 103.4 x 52.4 毫米。所有單位均為毫米。

標準底板尺寸:103.4 x 58 x 10.7 毫米,具有各種連接埠和連接器,包括 USB、乙太網路和電源輸入。


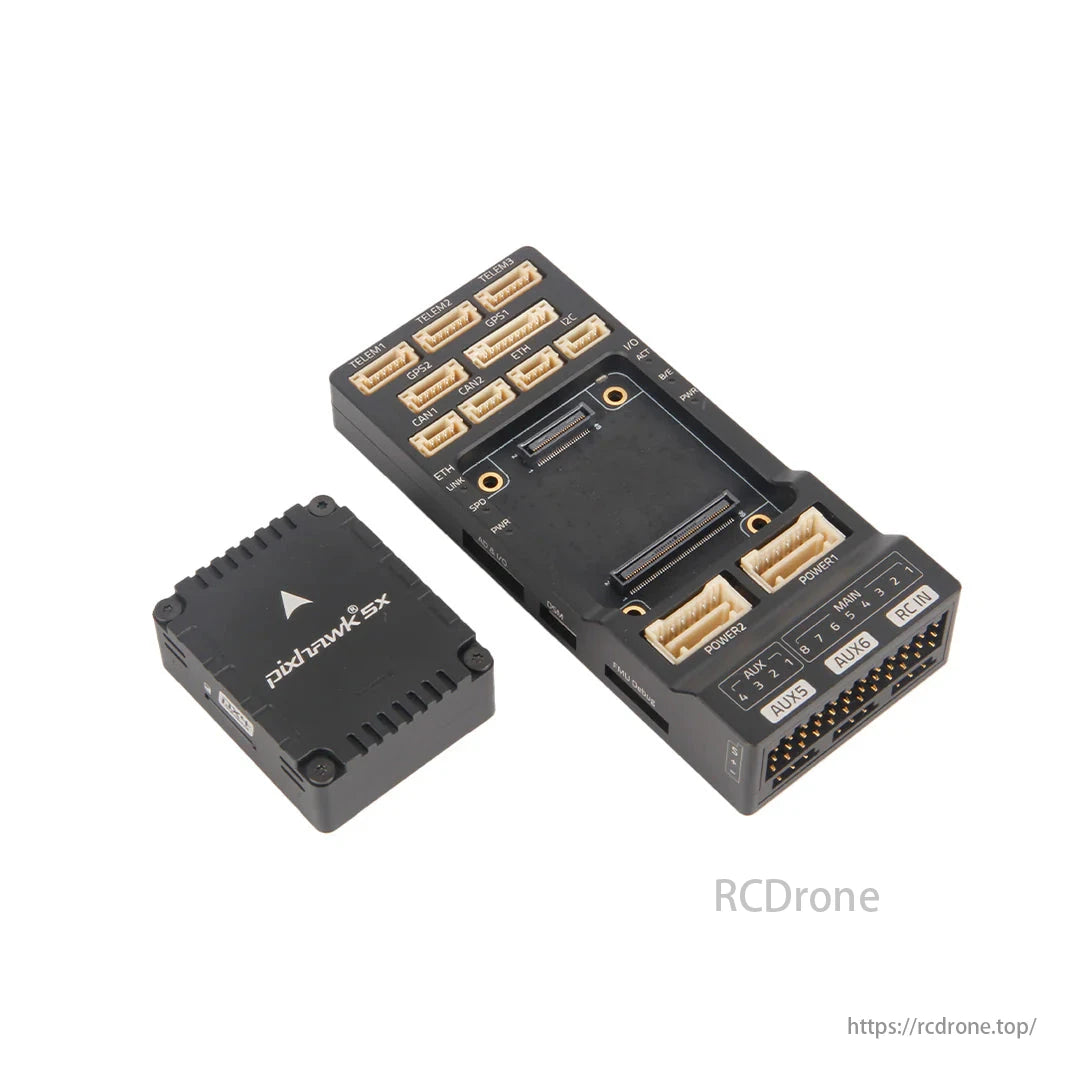
Pixhawk 5X 飛行控制器,附 TELEM1-3、GPS1-2、CAN1-2、ETH、I2C、POWER1-2、AUX5-6 和 RC IN 連接埠。
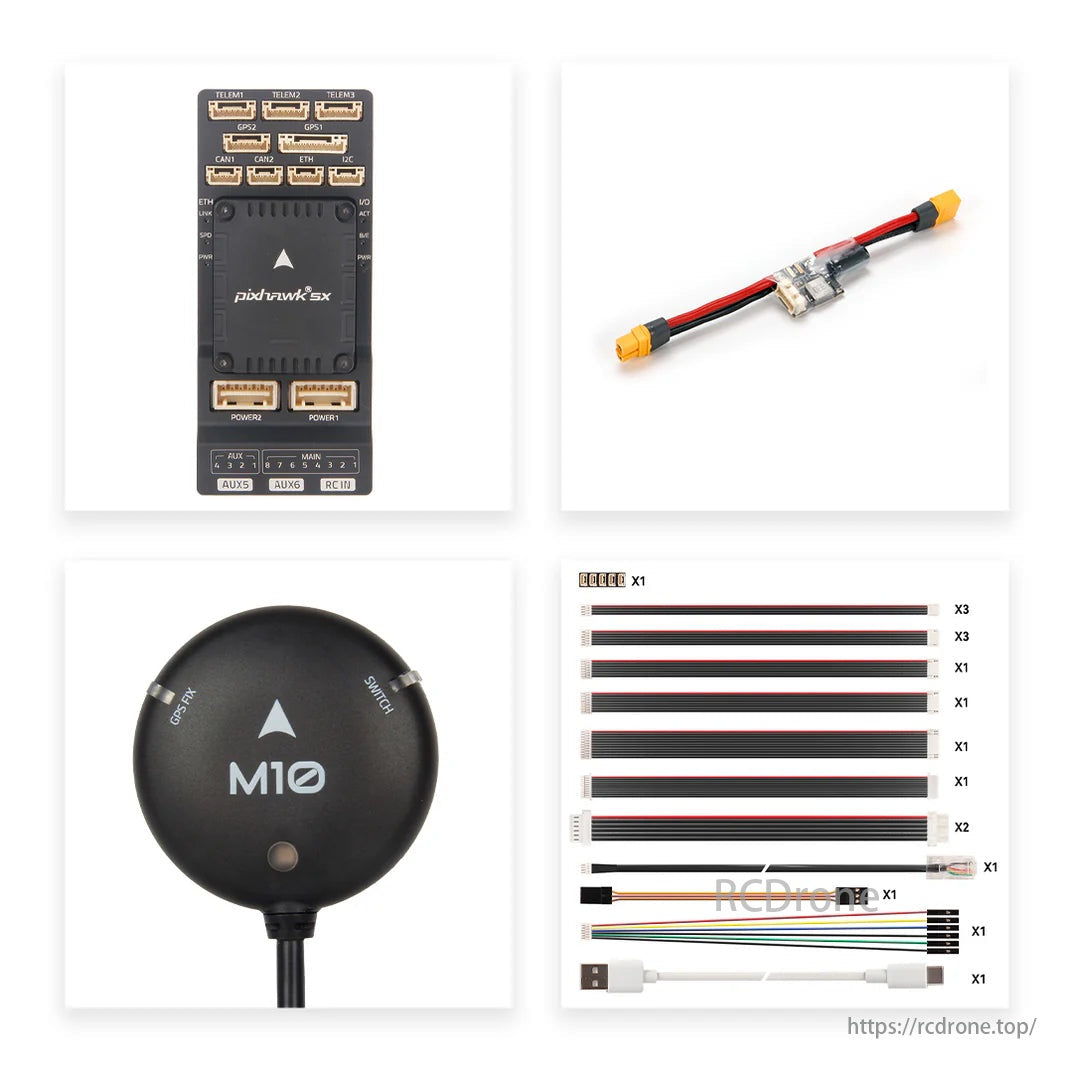
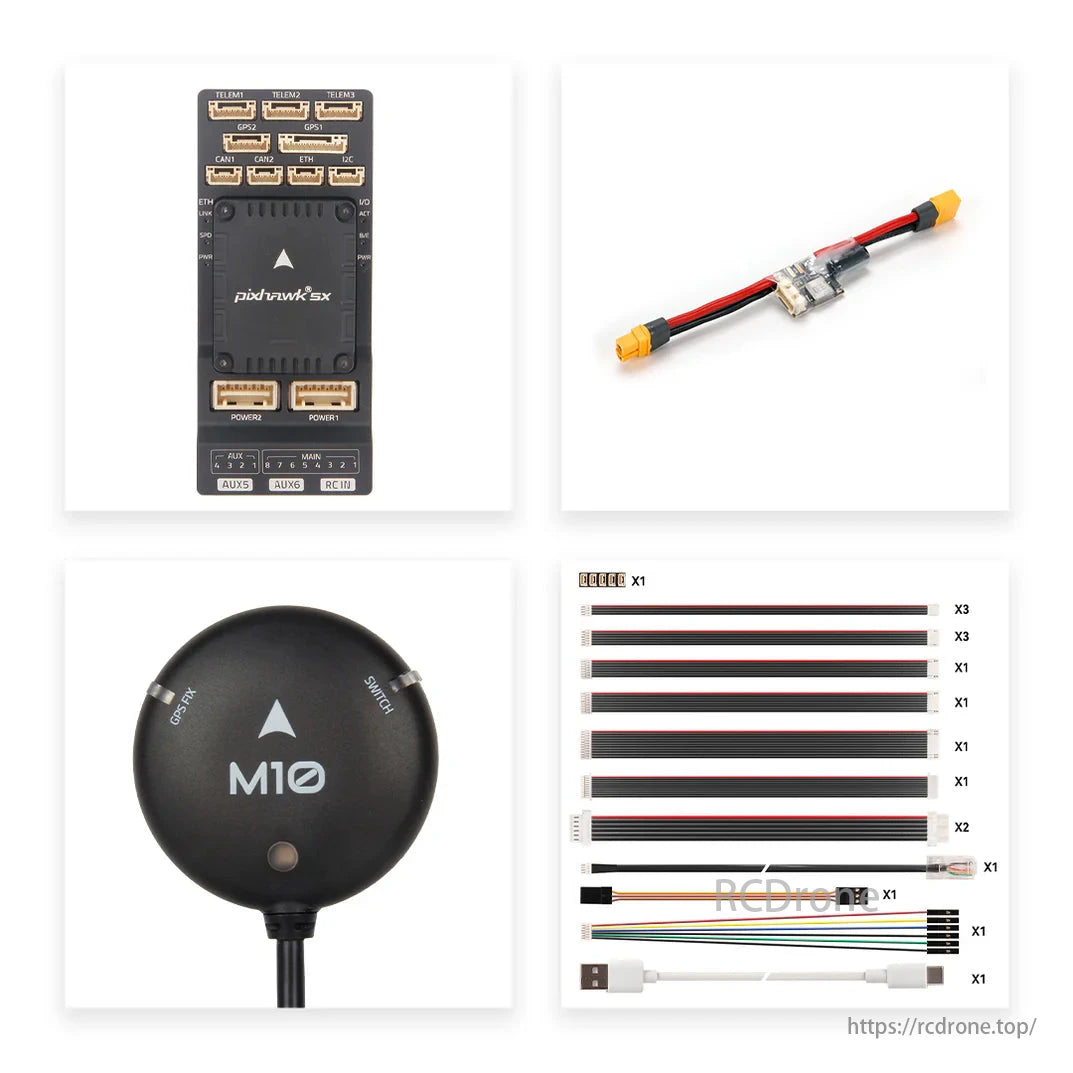
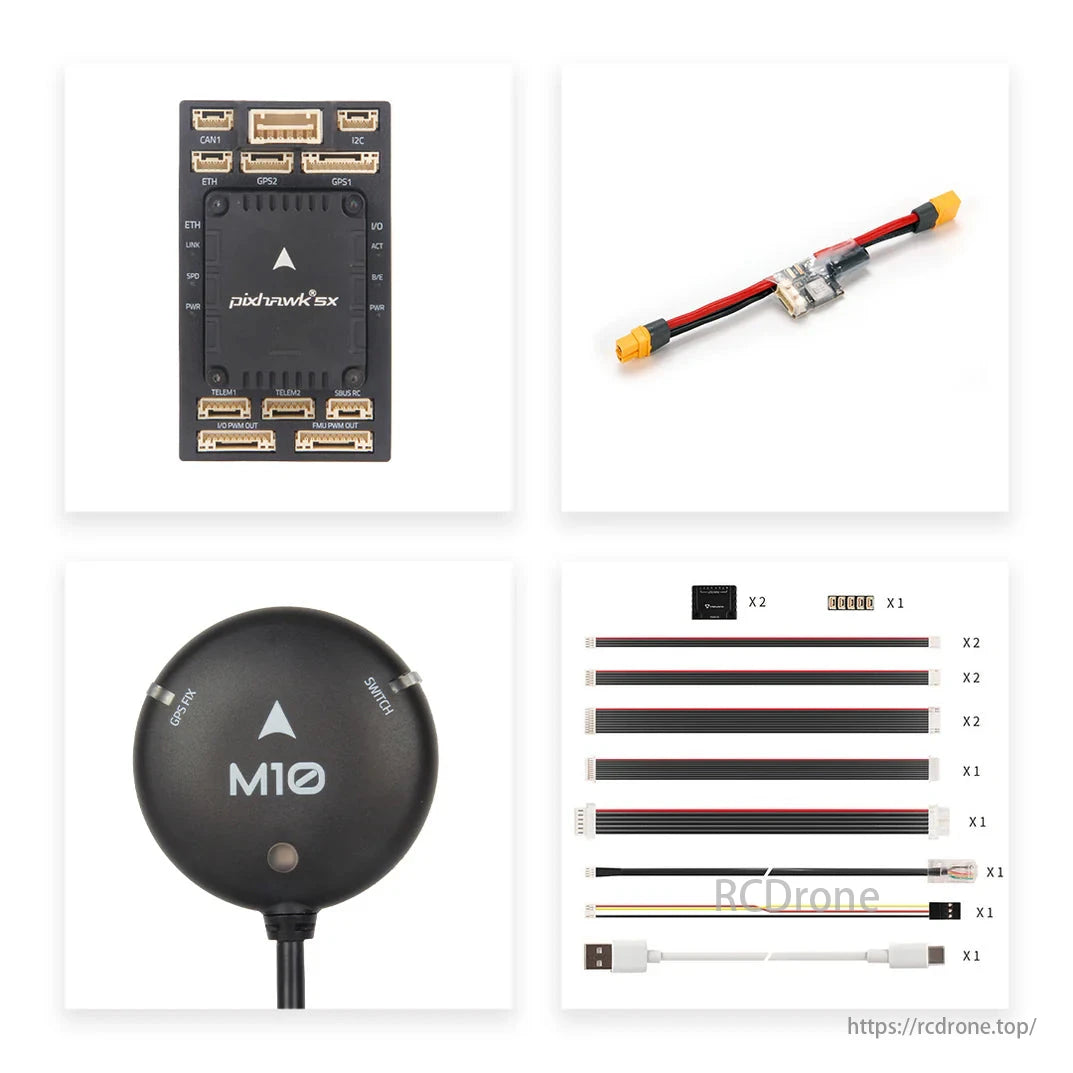
Pixhawk 5X 飛行控制器、M10 GPS 模組、電源模組以及用於無人機組裝的各種電纜。
Related Collections