Holybro Pixhawk 6X-RT -(開發者版)自動駕駛飛行控制器標準/迷你套裝
Holybro Pixhawk 6X-RT -(開發者版)自動駕駛飛行控制器標準/迷你套裝
HolyBro
定價
$379.00 USD
定價
售價
$379.00 USD
單價
每
已包含稅額。
結帳時計算運費。
無法載入取貨服務供應情況
概論
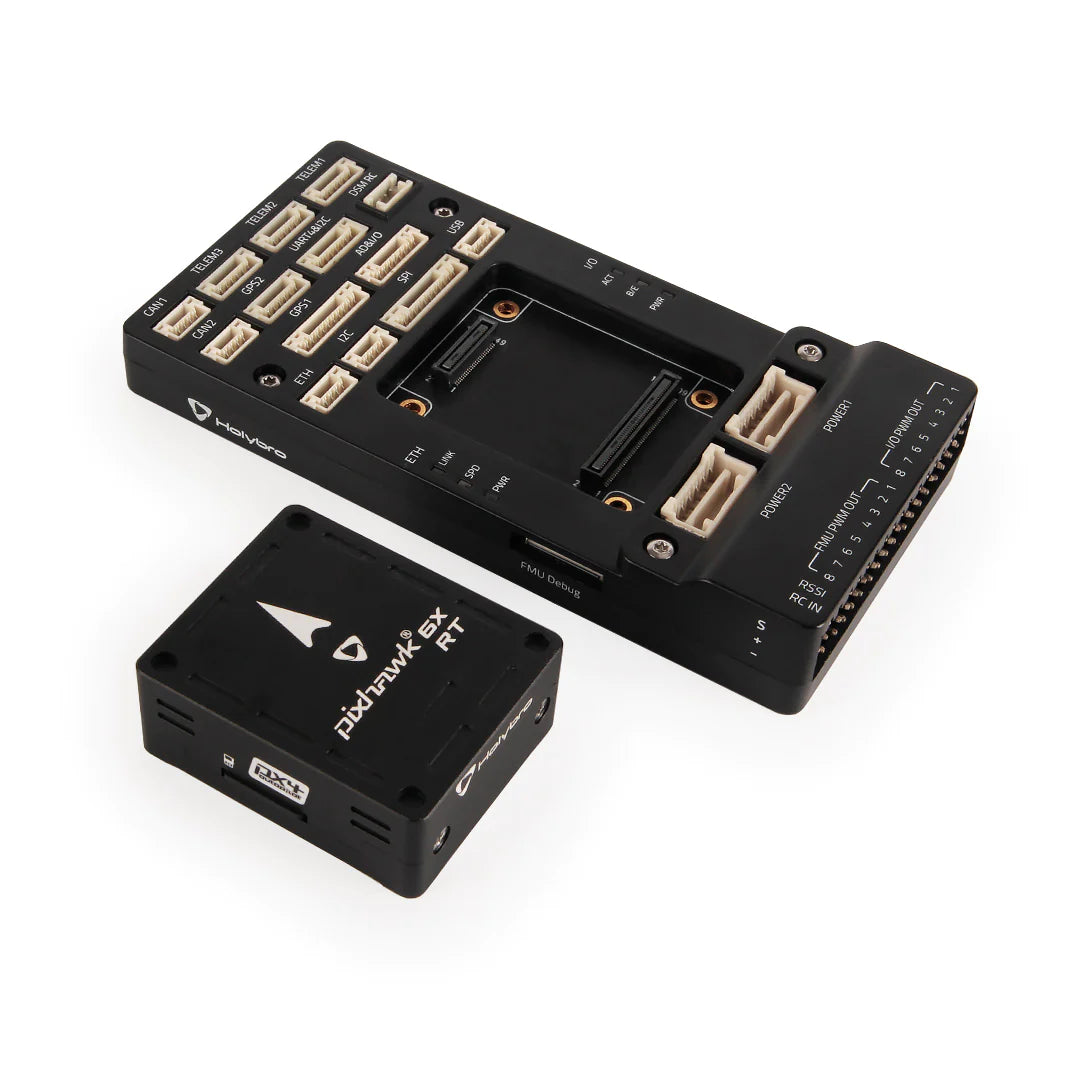
Pixhawk 6X-RT 基於 Pixhawk® FMUv6X-RT 開放標準和 Pixhawk® 自動駕駛儀匯流排標準。 它預先安裝了 PX4 Autopilot®。 在 Pixhawk 6X-RT 飛行控制器內部,您可以找到一個基於 NXP 的 i.MXRT1176 MCU 與 Bosch® 和 InvenSense® 的感知器技術相結合,為您提供控制任何自動駕駛車輛的靈活性和可靠性。
i。MXRT1176 微控制器包含一個 1 GHz 的 Arm® Cortex-M7 和一個 400 MHz 的 Cortex-M4。 它具有 2MB SRAM 和 64MB 八路 SPI 快閃記憶體。 由於更新的處理能力,開發人員可以提高開發工作的生產力和效率,從而允許複雜的演算法和模型。
它包括專為提高穩定性而設計的高性能、低噪音 IMU,並在單獨的總線上具有三重冗餘 IMU 和雙冗餘氣壓計。 當自動駕駛儀偵測到感測器故障時,系統會無縫切換到另一個感測器以保持飛行控制的可靠性。 獨立的 LDO 透過獨立的電源控制為每個感測器組供電。 隔振系統可濾除高頻振動並降低噪音,確保讀數準確,使飛行器達到更好的整體飛行性能。 整合的 Microchip 乙太網路 PHY 現在可以透過乙太網路與任務電腦進行高速通訊。
Pixhawk 6X-RT 非常適合企業研究實驗室、新創公司、學術界(研究人員、教授、學生)和商業應用的開發人員。 此飛行控制器與任何使用 Pixhawk Autopilot 總線的底板相容,例如 Pixhawk 底板、 Pixhawk Mini 底板和 Pixhawk RPi CM4 底板。
設計要點
- 高性能雙核心 i。MXRT1176 處理器,採用 Cortex-M7 @ 1GHz – Cortex-M4 @ 400MHz
- 模組化飛行控制器:獨立的 IMU、FMU 和基礎系統透過 100 針和 50 針 Pixhawk® 自動駕駛儀匯流排連接器連接。
- 冗餘:獨立匯流排上的 3x IMU 感知器與 2x 氣壓計感知器
- 三重冗餘域:完全隔離的感測器域,具有單獨的匯流排和單獨的電源控制
- 隔振系統可濾除高頻振動並降低噪音,確保讀數準確
- 用於高速任務電腦整合的乙太網路介面
- IMU 透過板載加熱電阻進行溫度控制,使 IMU 達到最佳工作溫度
- 硬體安全元件 NXP EdgeLock SE051 廣泛信任的 EdgeLock SE050 Plug & Trust 安全元件系列的擴充,支援現場小程式更新並提供經過驗證的安全性,通過CC EAL 6+ 認證,帶有AVA_VAN。5 直至操作系統級別,針對最新的攻擊場景提供強有力的防護。 乙g 安全儲存操作員 ID
注意:
- 此開發者版本適合早期採用者,同時我們將繼續累積飛行測試時間
- 此飛行控制器目前僅在 PX4 Flight Stack 中支援。 (韌體目標:FMUv6xrt)。 Ardupilot 不支援。
- 此飛控使用數位電源模組(與 Pixhawk 6X 相同,完整清單可在此處找到)電源模組比較表
規格
-
MCU:i。MXRT1176
-
Cortex-M7 @ 1GHz
-
Cortex-M4 @ 400MHz
-
2MB SRAM
-
64MB 八路 SPI 快閃記憶體
-
IO 處理器:STM32F103
-
32 位元 Arm® Cortex®-M3、72MHz、64KB SRAM
-
板載感測器
-
加速/陀螺儀:BMI088
-
加速/陀螺儀:ICM-42670-P
-
加速/陀螺儀:ICM-42686-P
-
彈匣:BMM150
-
氣壓計:2x BMP388
- 硬體安全元件
- NXP EdgeLock SE051C2
- SDHC 介面
- 12 頻道 PWM
- 8x UART
- 4x I2C
- 6x SPI
- 3x CAN-FD
- RMII 100M 乙太網路
- USB
- 開源軟體支援
- PX4 自動駕駛儀
- NuttX RTOS
- Zephyr RTOS
SKU20257 標準套裝/ SKU258 迷你套裝包含:
-
Pixhawk 6X-RT 飛行控制器模組
-
Pixhawk 標準底座/Pixhawk 迷你底座
- PM02D 高壓電源模組
-
電纜套件
參考連結:
- 韌體刷寫說明(Github)
- NXP IMXRT1176 1 GHz MCU 上的 PX4 - NXP 的簡報投影片
- 我。MX RT1176 – 產品頁面 具有 Arm® Cortex® 核心的 1 GHz 交叉 MCU
- EdgeLock® SE051:經過驗證、易於使用的物聯網安全解決方案,支援可更新性和自訂小程式
Related Collections