Holybro X500 v2 PX4 開發套件 - 碳纖維無人機套件,附 Holybro Pixhawk 6C / 6X、M8N GPS、SiK 遙測無線電、工業無人機
Holybro X500 v2 PX4 開發套件 - 碳纖維無人機套件,附 Holybro Pixhawk 6C / 6X、M8N GPS、SiK 遙測無線電、工業無人機
HolyBro
定價
$769.00 USD
定價
售價
$769.00 USD
單價
每
已包含稅額。
結帳時計算運費。
無法載入取貨服務供應情況
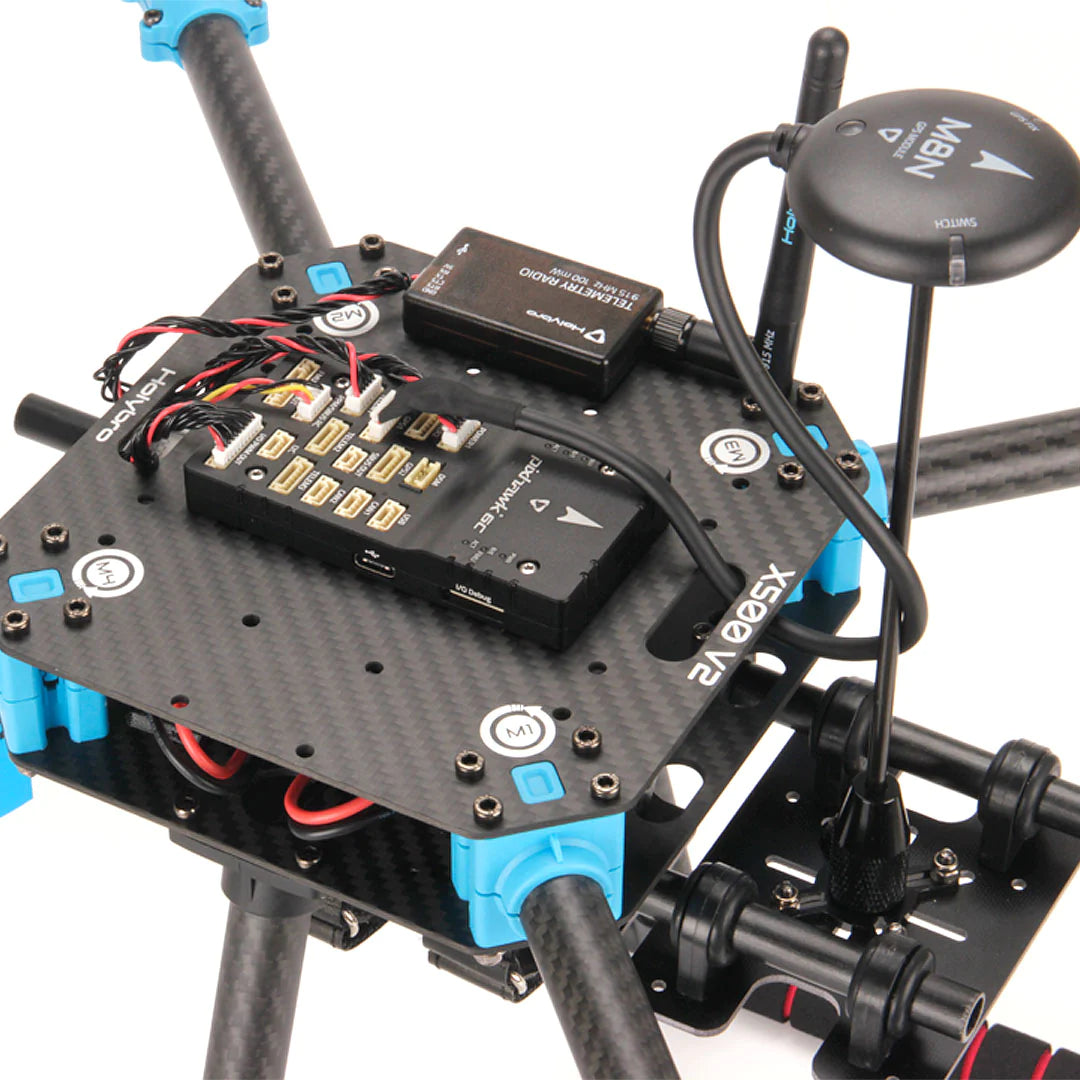
PX4 開發套件- X500 v2 是一款經濟實惠、輕巧且堅固的碳纖維專業開發無人機套件,配備最新的Holybro Pixhawk 6C 或 Pixhawk 6X 自動駕駛儀飛行控制器、M8N GPS 和即插即用 SiK 遙測無線電。它的組裝過程快速簡單(約 30 分鐘),無需焊接,因此您可以將更多時間用於飛行和開發。它配備了 X500 V2 框架套件和馬達、電調、配電板和額外的螺旋槳。無人機手臂預先安裝了馬達和 ESC,因此可以直接插入配電板,無需焊接。
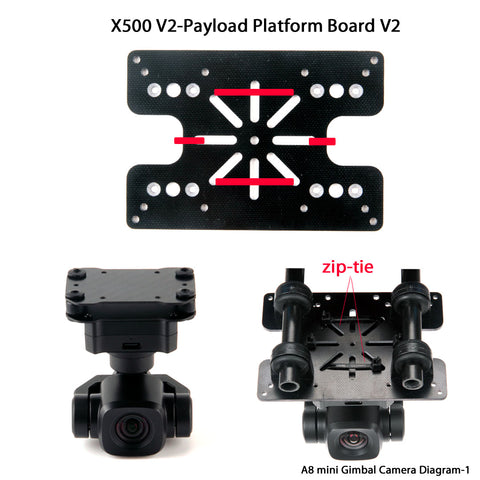
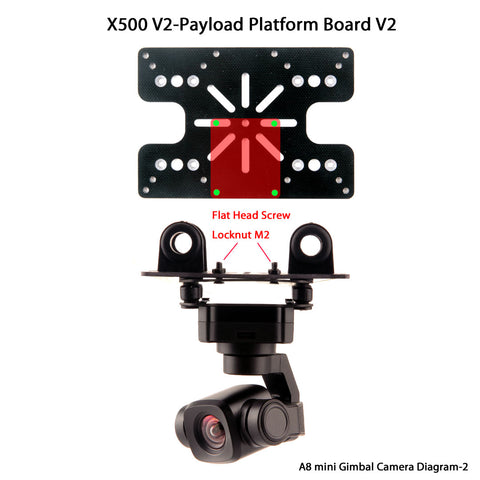
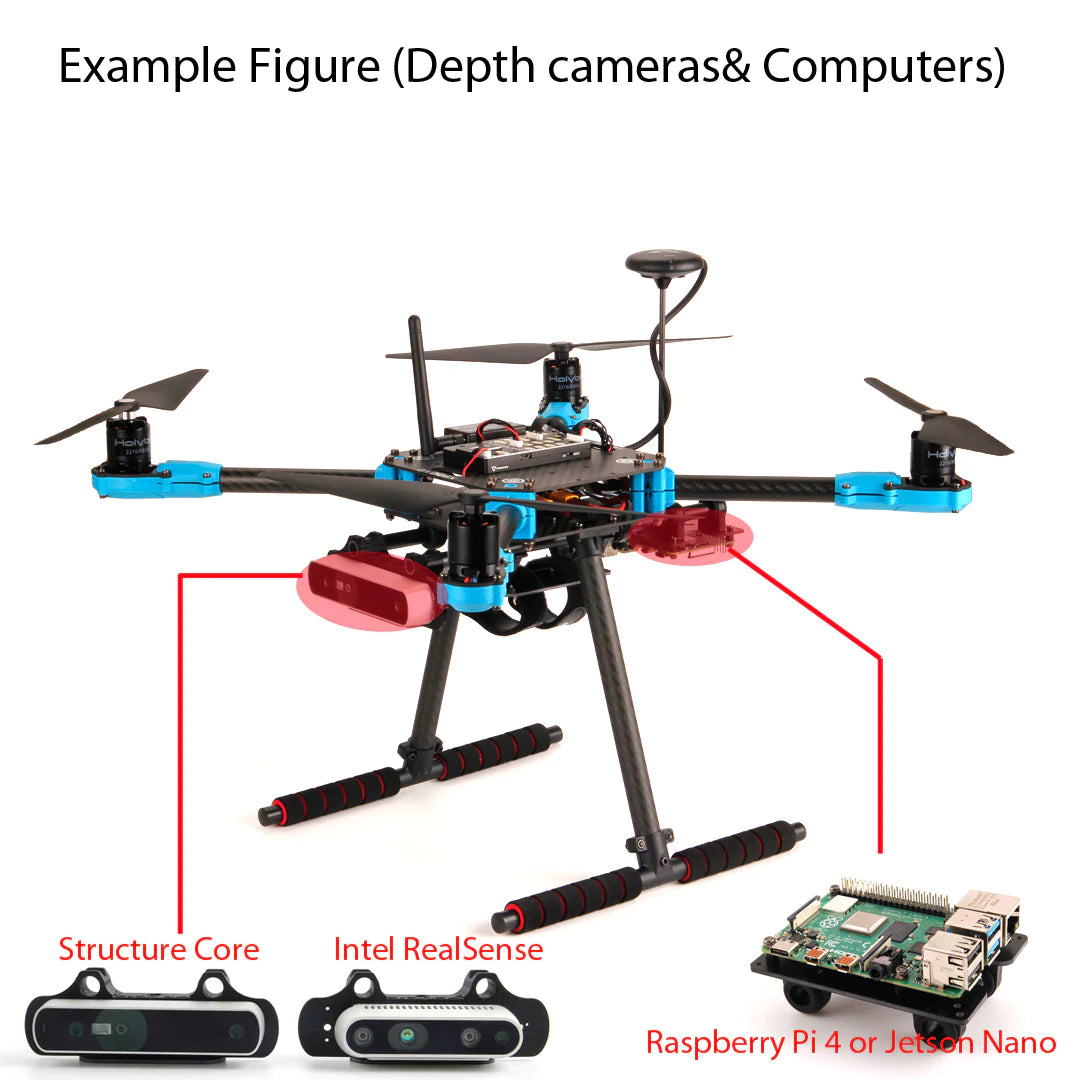
框架(X500 v2)採用全碳纖維斜紋布製成,碳纖維管臂由新設計的纖維增強尼龍連接器支撐,連接器上帶有方便的凹口馬達和車身兩側,提供更簡單、更直接的安裝。起落架由16 毫米和10 毫米直徑的碳纖維管組成,連接器經過加厚和加固。孔。有一個可選深度攝影機安裝座(單獨購買)適用於各種深度攝影機,例如英特爾實感系列和 Structure Core 深度攝影機。頂部和底部碳纖維板之間的間距已增加,以便更容易接近。可調式電池安裝板已加大,可支援更大的電池,從而實現更長的飛行時間。導軌安裝系統可容納大量相機支架和萬向節,用於各種應用。軟體包中提供了所有安裝工具。
注意:Pixhawk 6C 飛行控制器與 PX4 和 Ardupilot 相容,但附帶 PX4 開源 Autopilot 韌體。
特徵:
- 全新Pixhawk 6C 或 Pixhawk 6X 飛行控制器 帶 M10含 M10 M10 M10
- 全新框架設計,組裝時間最短(約 30 分鐘),不需焊接
- 帶有纖維增強尼龍連接器的碳纖維框架,安裝簡單直接
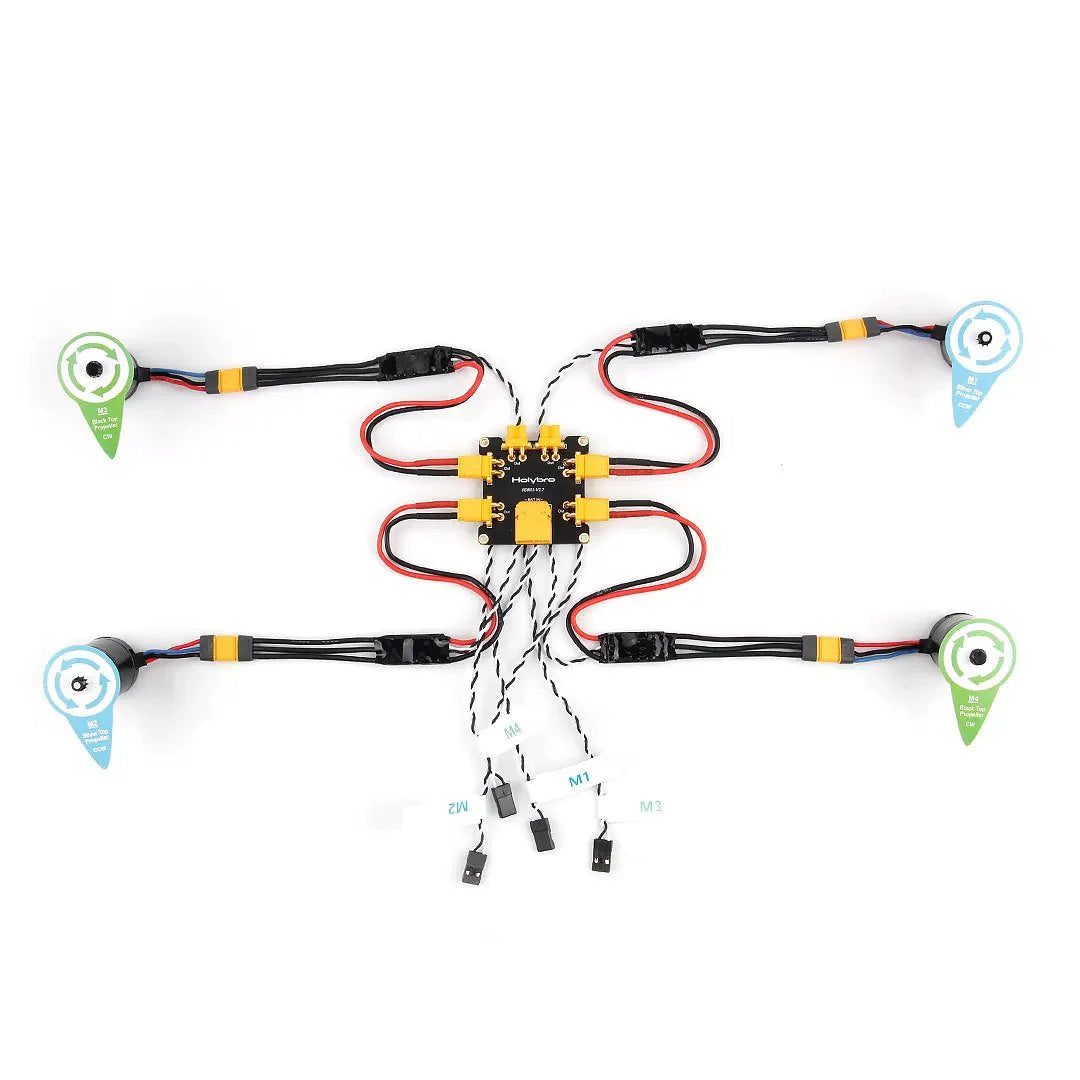
- 預裝馬達和電調,帶有用於 PDB 的簡單 XT30 電源插頭
- XT60 和 XT30 插頭的配電板 (PDB)
- 安裝配套計算機,例如 Raspberry Pi 和 Nvidia Jetson Nano
- 適用於英特爾實感和 Structure Core 的可選深度攝影機安裝座
註:
- Pixhawk 6X 版本現在附 PM02D-HV(高電壓)版本。在 PX4 中,您必須設定 SENS_EN_INA228 才能啟用此。 此 HV 版本僅在 ardupilot 4.4 及更高版本中支援。可在此處找到設定指南。
M10 GPS 的韌體支援:需要 PX4 1.14 和 ArduPilot 4.3 或更高版本。
PX4 開發套件 - X500 v2 包含:
- 自動駕駛儀飛行控制器:Pixhawk 6C(塑膠外殼)和 PM02 V3 或 Pixhawk 6X(標準底座)和 PM02D
- M10 GPS 模組
- SiK 遙測無線電 V3 433/915MHz
- X500 V2 框架套件 (SKU30120)
-
預安裝項目:
- 馬達 - Holybro 2216 KV920 馬達(4 件),搭配 XT30 插頭(馬達規格可在此處找到)
- 電調 - BLHeli S 電調 20A(4 件),附 XT30 插頭 - 相容 4S 電池
- 1045 螺旋槳(6 個)
- 配電板(電池的 XT60 插頭和用於 ESC 及週邊設備的 XT30 插頭)
-
其他選購商品(單獨販售)
- RadioMaster TX16S RC 控制器
- RadioMaster R81 接收器
- 深度攝影機安裝座
X500 V2 框架套件詳細資料 (SKU30120):
- 主體 - 全碳纖維頂板與底板(144 x 144mm,2mm 厚)
- 手臂 - 高強度、超輕量 16 毫米碳纖維管,配有新設計的纖維增強尼龍連接器
- 起落架 - 16mm 和 10mm 直徑碳纖維管,帶有強化和改進的塑膠 T 形連接器。
- 平台板 - 帶有用於 GPS 和流行配套電腦(例如 Raspberry Pi 4 和 Jetson Nano)的安裝孔
- 雙 10mm Ø 桿 x 250 mm 長導軌安裝系統
- 有兩個電池帶的電池安裝座
- 安裝手動工具
機械規格:
- 軸距:500mm
- 馬達安裝圖案:16x16mm
- 框體:144x144mm,2mm厚
- 起落架高度:215mm
- 頂板與底板之間的間距:28mm
- 重量:610g
- 飛行時間:約 18 分鐘懸停,無額外有效載荷。使用 5000mAh 電池進行測試。
- 有效負載:1500g(不含電池,70%油門)
- 電池推薦:4S 3000-5000mAh 20C+,附 XT60 鋰電池(不含)

X500 v2 組裝指南
參考:
馬達規格
3D 列印:
Holybro_X500_V2_3D列印設定指南:
idorobotics文章
PX4 設定指南
Ardupilot 設定指南
一些提示: