Inspire Robots EG2-4C2 電動夾爪,70mm 行程,20N 力量,231g 重量,RS485 控制,具自鎖功能,適用於機器人
Inspire Robots EG2-4C2 電動夾爪,70mm 行程,20N 力量,231g 重量,RS485 控制,具自鎖功能,適用於機器人
Inspire Robots
無法載入取貨服務供應情況
概述
Inspire Robots EG2-4C2 電動夾爪是一款高精度、輕量化的雙指夾爪,專為機器人自動化應用而設計。它採用創新的線性機械連接設計,將驅動和控制集成在一個緊湊的模塊中。與EG2-4B2型號相比,EG2-4C2提供更高的最大夾持力20N(對比15N),稍重的重量(231克),以及不同的運動性能(速度較慢但力量更強)。具備力控制、位置控制、大行程和斷電自鎖等特點,EG2-4C2是對於需要可靠和精確夾持性能的工業和協作機器人的絕佳選擇。
主要特點
-
驅動 &和控制集成設計 – 簡化部署,減少外部接線和硬體。
-
力控制 &和位置控制 – 可調的抓握力範圍為0–20N,精度±1N;定位精度±0.5mm。
-
大行程 – 70mm行程,適合多樣化物體的處理。
-
增強抓握力 – 最大力可達20N,適合較重或更安全的夾持任務。
-
輕巧 &和緊湊 – 總重231克,為機器手臂和空間受限的環境進行優化。
-
斷電自鎖 – 確保在斷電期間的安全性和物體保持。
-
耐用 &和可靠 – IP40防護等級和0–40℃工作溫度範圍。
技術規格
| 參數 | 數值 |
|---|---|
| 型號 | EG2-4C2 |
| 通訊介面 | RS485 |
| 全行程(雙側) | 70mm |
| 重量 | 231g |
| 握力 | 0–20N |
| 握力精度 | ±1N |
| 操作電壓 | DC24V ±10% |
| 峰值電流 | 0.7A |
| 定位精度 | ±0.5mm |
| 最高速度 | 70mm/s |
| 全行程關閉時間 | 1.3秒 |
| 保護等級 | IP40 |
| 工作溫度 | 0–40℃ |
性能曲線
-
速度與行程: 在中間行程時達到約70 mm/s;比EG2-4B2慢。
-
夾持力與行程: 在極端位置時最大夾持力上升至近30N,整個行程表現穩定。
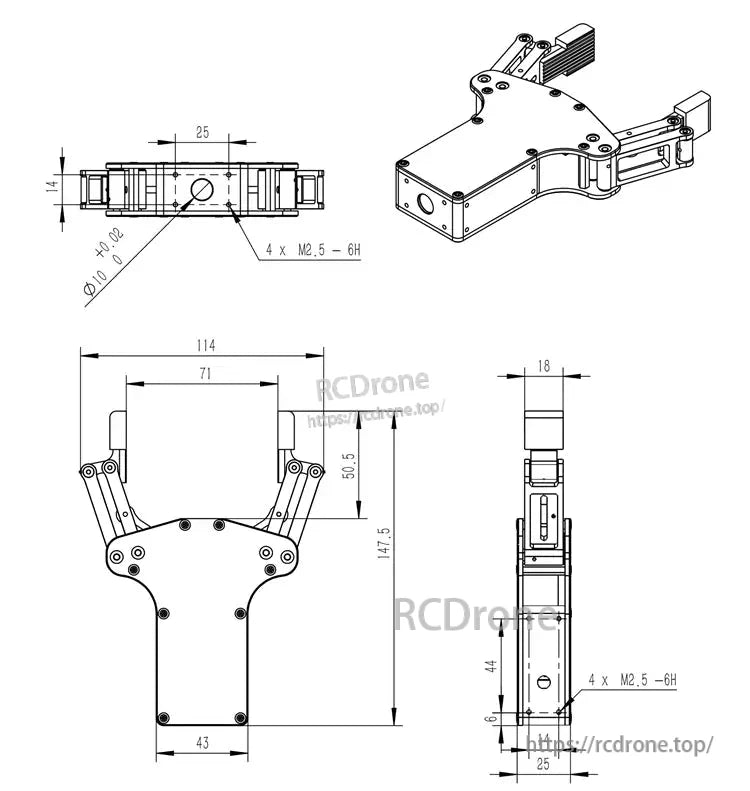
尺寸
-
總長度: 147。5mm
-
寬度(閉合狀態): 43mm
-
最大開口: 71mm (70mm 行程)
-
安裝介面: 4 × M2.5 孔
型號比較: EG2-4B2 vs. EG2-4C2
| 規格 | EG2-4B2 | EG2-4C2 | 主要差異 |
|---|---|---|---|
| 最大夾持力 | 15N | 20N | 4C2 提供更強的夾持力 |
| 重量 | 223g | 231g | 4C2 稍重 |
| 最大速度 | 97mm/s | 70mm/s | 4B2 更快 |
| 關閉時間 | 0.85s | 1.3s | 4B2 關閉速度更快 |
| 行程 | 70mm | 70mm | 相同行程 |
| 焦點 | 輕量化,更高速度 | 更高的夾持力,穩固的握持 | 不同的應用優先級 |
應用
這款 EG2-4C2 電動夾爪 非常適合於:
-
需要更高夾持力的工業和協作機器人
-
電子組裝、精密零件處理和輕型製造
-
實驗室自動化、生物醫學設備和測試系統
-
需要安全物體保持的場景,具備自鎖功能
詳細資訊
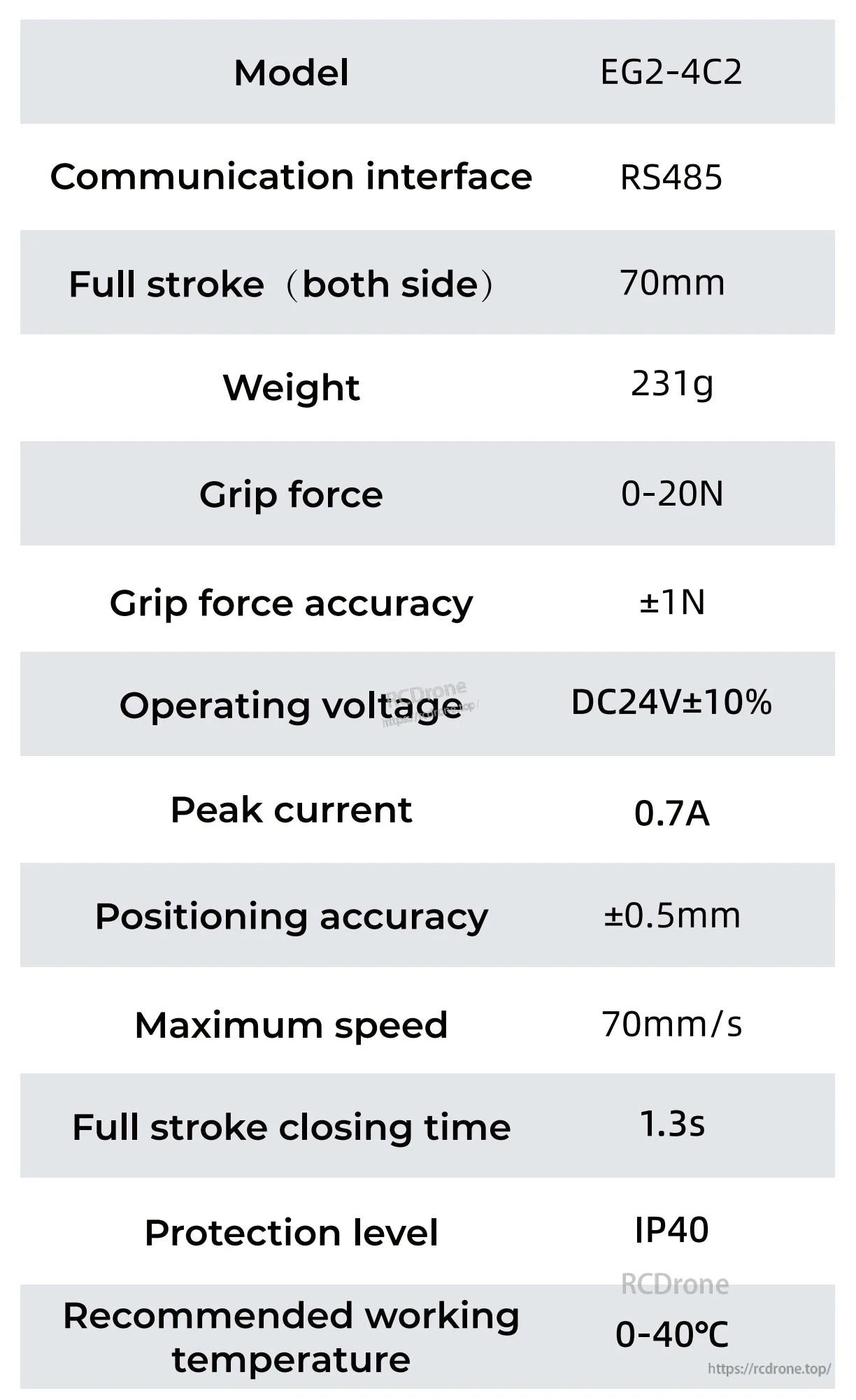
電動夾爪 EG2-4C2 提供 70mm 行程,231g 重量,0–20N 夾持力,±1N 精度,DC24V±10% 電壓,0。7A 峰值電流,±0.5mm 定位,70mm/s 速度,1.3s 關閉時間,IP40 防護,操作溫度 0–40°C。
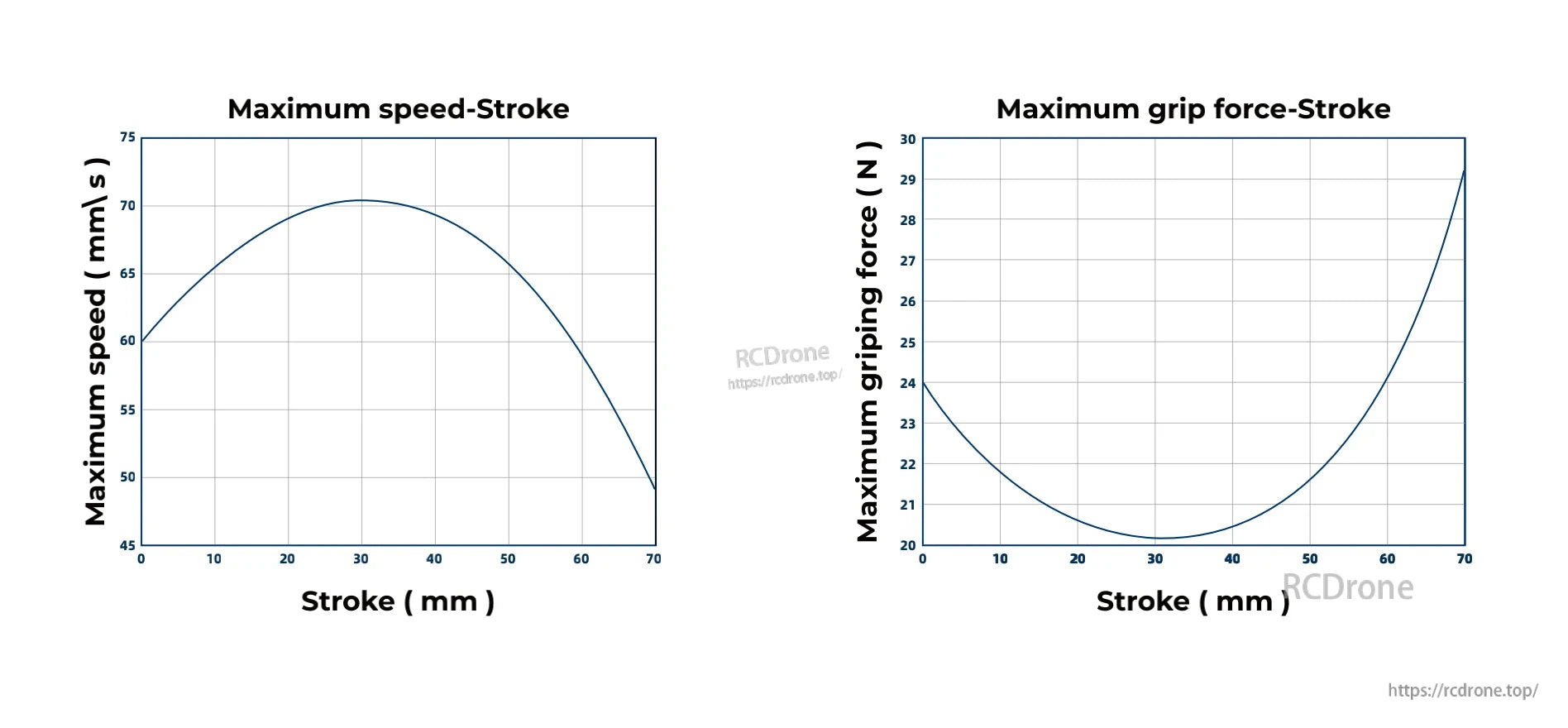
EG2-4C2 電動夾爪的性能曲線顯示在 0–70 mm 行程範圍內的最大速度和夾持力。