


Inspire Robots RH56DFTP 靈巧機械手 – 6 自由度,30N 抓力,觸覺& 力感測器,ModbusTCP+CAN 控制
Inspire Robots RH56DFTP 靈巧機械手 – 6 自由度,30N 抓力,觸覺& 力感測器,ModbusTCP+CAN 控制
Inspire Robots
無法載入取貨服務供應情況
概述
Inspire Robots RH56DFTP 智能仿生機器手是一款高精度的五指靈巧手,專為先進的機器人應用而設計。它具備6個自由度、12個關節,以及結合了6個力傳感器和17個觸覺傳感器,提供類人靈巧性和觸覺感知。其指尖力量達到30N(≈每根手指3公斤),具備高速角度運動和無縫的ModbusTCP+CAN (RS485)通訊,這款手非常適合用於研究、工業自動化和仿生機器人領域。
主要特點
-
類人觸覺精度:集成的觸覺傳感器提供實時感知,以實現精確的物體操作。
-
強大而穩定的抓握力:每根手指提供高達3公斤的驅動力,能夠可靠地抓取各種物體。
-
斷電自鎖: 在斷電時保持位置,消除啟動時重新歸零的需求。
-
高速操作: 拇指運動超過130°/s,而四指運動達到200°/s,實現靈敏控制。
-
耐用可靠: 專為在研究實驗室、機器人平台和工業環境中長期使用而設計。
規格
| 參數 | 數值 |
|---|---|
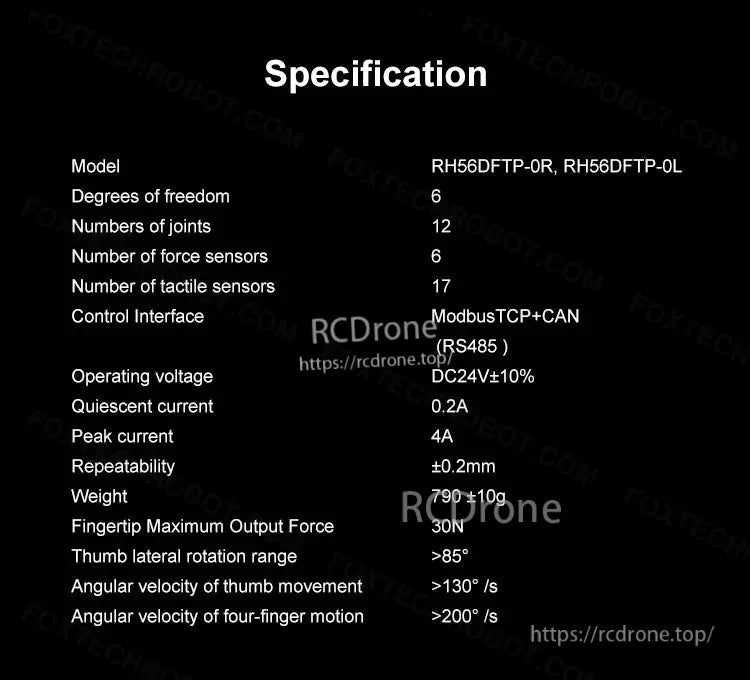
| 型號 | RH56DFTP-0R, RH56DFTP-0L |
| 自由度 | 6 |
| 關節數量 | 12 |
| 力傳感器 | 6 |
| 觸覺傳感器 | 17 |
| 控制介面 | ModbusTCP + CAN (RS485) |
| 工作電壓 | 直流 24V ±10% |
| 靜態電流 | 0.2A |
| 峰值電流 | 4A |
| 重複性 | ±0.2mm |
| 重量 | 790g ±10g |
| 指尖最大輸出力 | 30N (≈3 kg) |
| 拇指側向旋轉範圍 | >85° |
| 角速度 – 拇指 | >130°/s |
| 角速度 – 四指 | >200°/s |
應用
-
研究與開發: 大學和實驗室中的先進機器人研究。
-
工業自動化: 高精度的組裝和處理任務。
-
仿生解決方案: 假手研究和類人機器人。
-
人工智慧與機器學習: 需要準確實時反饋的觸覺感知和操作項目。
亮點
RH56DFTP 在需要 精確力控 和 精細操作 的任務中表現出色,例如在不造成損壞的情況下採摘藍莓、櫻桃番茄或葡萄。它還能處理高強度的抓握,適用於堅固的工業應用,使其成為複雜操作任務的多功能解決方案。
詳細資訊
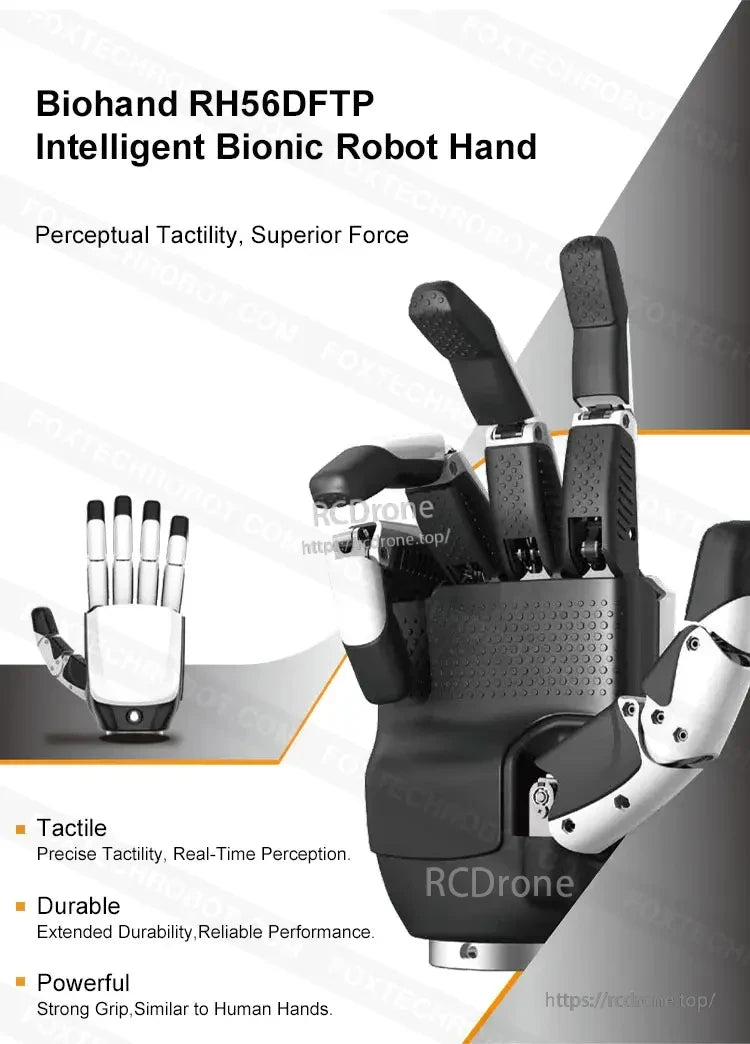
Biohand RHS6DFTP 智能仿生機器手提供感知觸覺、卓越的力量和實時精確觸覺,具有耐用的延長耐用性,確保可靠的性能和類似人手的強大抓握力。

具備六自由度的機器手,設計用於精確和靈活,完美適用於手術、組裝或實驗室工作等各種應用。

強大的抓握力,類人表現。每根手指的驅動力為3公斤。靈巧的機器人手,具備先進的設計和精密的工程技術。


功率損失自鎖機制使位置穩定可靠,啟動或關閉時無需重新歸零。


多功能手工具配備力感測器,適合摘取和夾持小型水果,如藍莓、櫻桃番茄和葡萄。

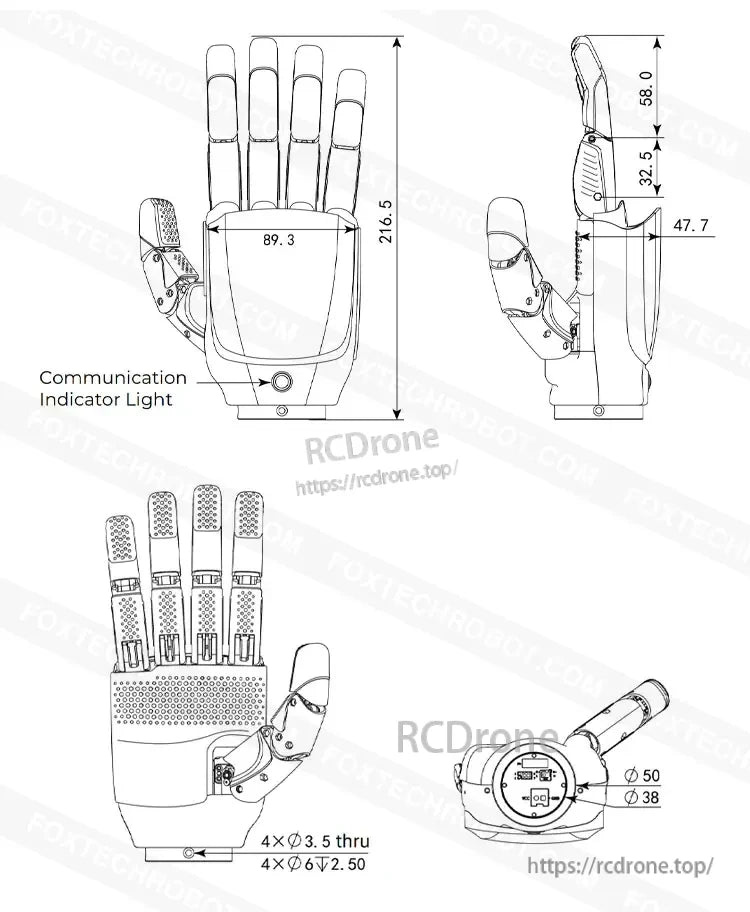
通訊指示燈,尺寸為 8 x 47.7 mm,長度 89 mm,無 LED,5x5: 38-4x03.5 至 4xp6v2,50 歐姆,2 層
RHS6DFTP-OR 和 RHS6DFTP-OL 規格型號具備 3 個自由度、12 個關節以及 17 個力感測器和觸覺感測器。它使用 Modbus TCP+CAN (RS485) 控制介面,工作電壓為 DC24V +10%。





