













LINKERBOT Linker Hand L10 機器人手,10 自由度,CAN/RS485 控制,蝸輪驅動,80N 抓力,DC24V±10%
LINKERBOT Linker Hand L10 機器人手,10 自由度,CAN/RS485 控制,蝸輪驅動,80N 抓力,DC24V±10%
LINKERBOT
無法載入取貨服務供應情況
概述
LINKERBOT Linker Hand L10 是一款設計用於靈活操作和精確控制的機器人手。它具有 10 個自由度,配備螺旋齒輪傳動,並通過 CAN/RS485 進行通信,以便可靠地集成到研究和工業系統中。
主要特點
- 10 DoF 靈巧手,配備螺旋齒輪傳動以實現穩定驅動。
- 控制接口:CAN 和 RS485。
- 重複定位精度 < +/-0.2mm;典型開/關時間 1.2s。
- 力量能力:最大拇指指尖力量 15N,最大四指指尖力量 15N,最大五指抓握力量 80N。
- 產品手冊中的控制模式和實用工具:位置控制、速度控制、通過指尖傳感器的觸覺反饋(力量控制)以及在線固件升級。
- 生態系統(每個產品材料):支持的機器手臂 UR、Franka、XArm、RealMan、AgileX;支持的模擬器 Pybullet、Isaac、MuJoCo;使用範例包括 ROS1、ROS2、Python、C++;數據獲取方法包括遙操作手套、外骨骼手套、液態金屬感應手套、視覺和虛擬現實(Meta Quest 3)。
如需預售或整合支持,請聯繫 [email protected] or 或訪問 https://rcdrone.top/。
規格
| 自由度 (DoF) | 10 |
| 關節數量 | 20 (10 主動 + 10 被動) |
| 傳動模式 | 螺旋齒輪傳動 |
| 控制介面 | CAN/RS485 |
| 重量 | 800克 |
| 最大負載 | 25公斤 |
| 工作電壓 | DC24V+/-10% |
| 靜態電流 | 0.2A |
| 平均電流 (無負載運動) | 0.5A |
| 最大電流 | 3A |
| 重複定位精度 | < +/-0.2mm |
| 開合時間 | 1.2s |
| 最大拇指指尖力量 | 15N |
| 最大四指指尖力量 | 15N |
| 最大五指抓握力量 | 80N |
壓力傳感器
| 壓電電阻陣列 | 6*12 |
| 傳感器承載面積 | 9.6*14.4mm |
| 觸發力 | 5g |
| 測量範圍 | 20N |
| 使用壽命 | 100,000 次循環 |
| 通信幀率 | 200FPS |
電容式傳感器(可選)
| 取樣頻率 | >=50Hz |
| 測量範圍 | 0-30N |
| 過載限制 | 60N |
| 壓力敏感度 | 0.1N |
| 測量解析度 | 0.5%FS |
| 測量精度 | 2%FS |
| 壓力解析度 | 0.25N |
| 方向解析 | 45° |
| 檢測距離 | 1cm(金屬,人體) |
包含內容
- USB轉CAN調試線 x1
- 連接線 XT30(2+2)x1
- 電源適配器 x1
- 電源線 x1
- 連接器手 L10 x1
應用
- 使用ROS1/ROS2和模擬器(Pybullet,Isaac,MuJoCo)的靈巧操作研究和教育。
- 通過手套、外骨骼手套、液態金屬感應手套、視覺和虛擬現實(Meta Quest 3)進行遠程操作。
- 精密組裝、基於路徑的操作、螺絲緊固、薄片抓取和一般物體處理。
手冊
Linker_Hand_L10_Product_Manual.pdf
詳情

Linker Hand L10 提供 10 自由度,通過連接機構和自定義電機驅動器實現精確運動。支持 UR、Franka、ROS、Python、VR、Pybullet、CAN 等多種機器人集成和控制方式。
Linker Hand L10 提供高靈活性,每根手指提供 4 個自由度以進行精確操作。其多傳感器系統配備攝像頭和電子皮膚,提供全面的環境感知和自適應互動。通過端雲集成,用戶可以通過無需編碼的技能庫雲服務快速部署手部,實現高效定制,同時降低操作複雜性。這些功能共同支持各種複雜應用,提升精度和易用性,而無需大量編程或設置。

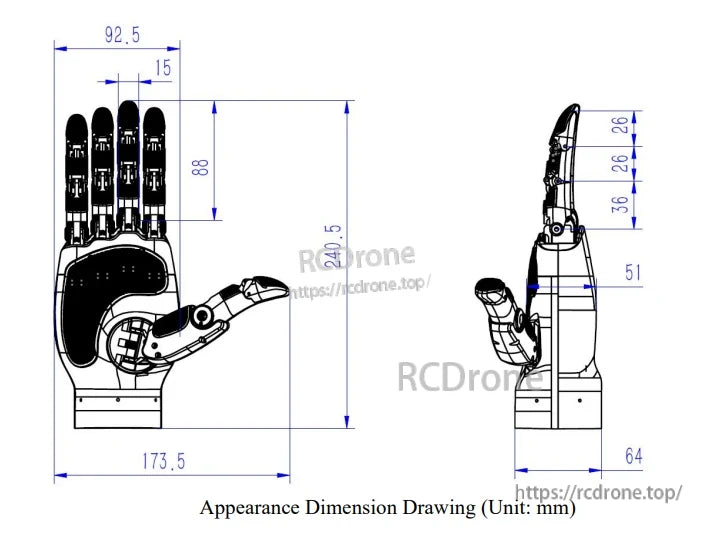
機器人手的尺寸以毫米為單位,顯示前視圖和側視圖,並提供設計和組裝的精確測量。
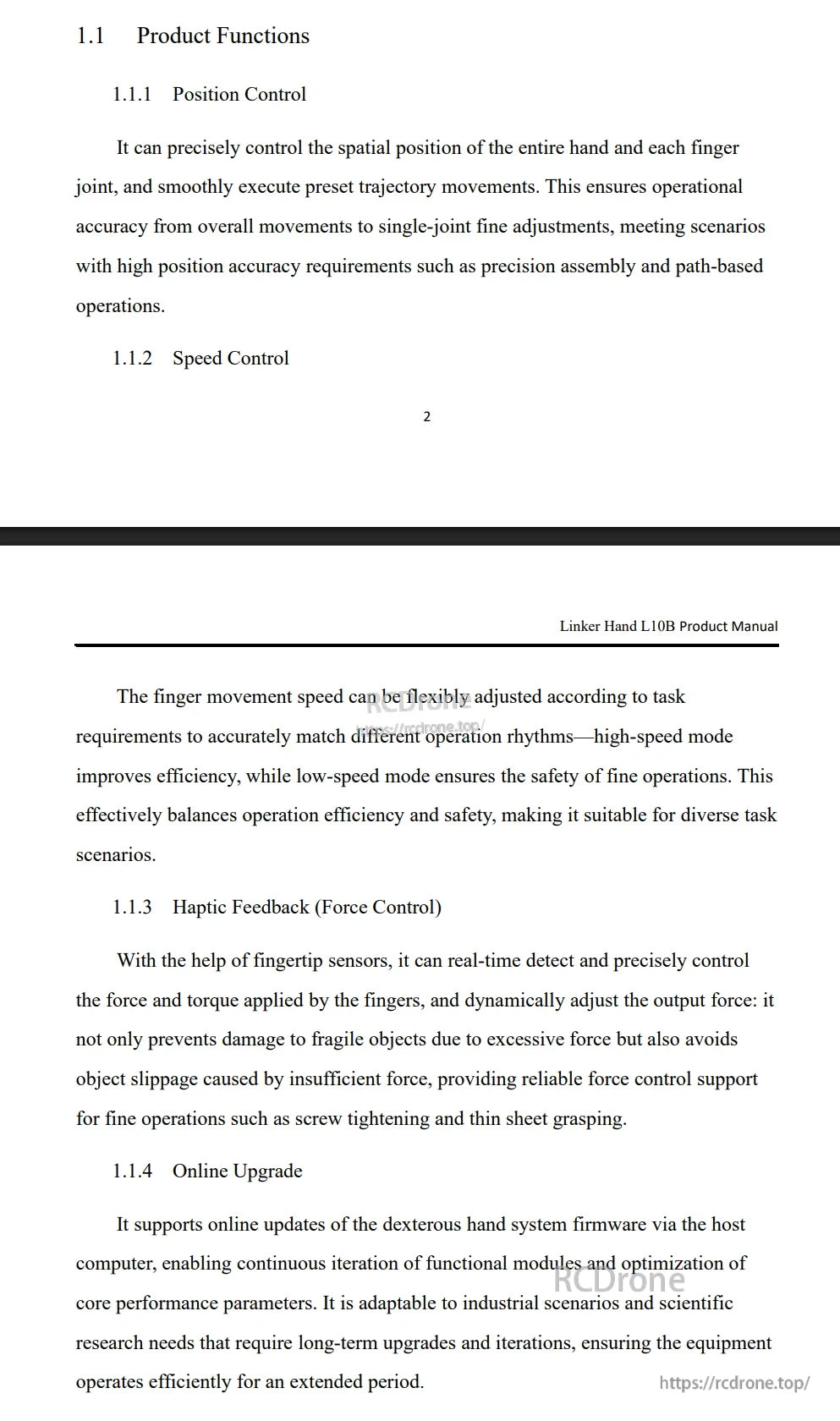
Linker Hand L10B 提供精確的位置和速度控制,觸覺反饋以管理力量,並支持在線固件升級。設計旨在實現準確性、安全性和適應性,適用於需要精細操作和長期性能的工業和研究應用。
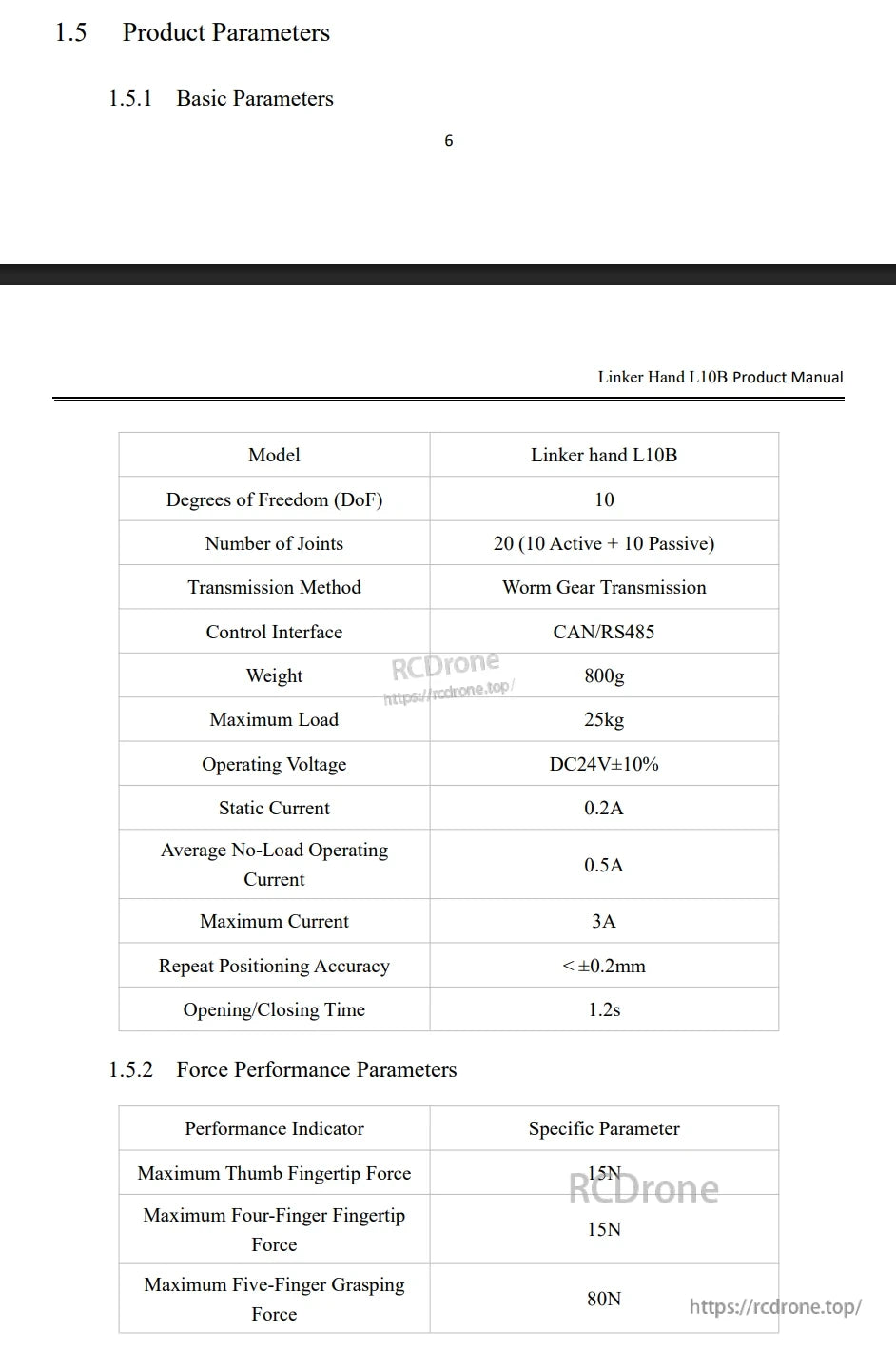
Linker Hand L10B 提供 10 自由度,20 個關節,螺旋齒輪傳動,並支持 CAN/RS485 控制。重達 800 克,能夠在 DC24V 下處理高達 25 公斤的負載,提供精確的定位和高達 80N 的抓取力量。

具備 6x12 壓阻陣列(20N 範圍,100k 週期)。可選的電容傳感器:≥50Hz 取樣,0–30N 範圍,45° 方向解析度,能在 1cm 處檢測金屬或人體。
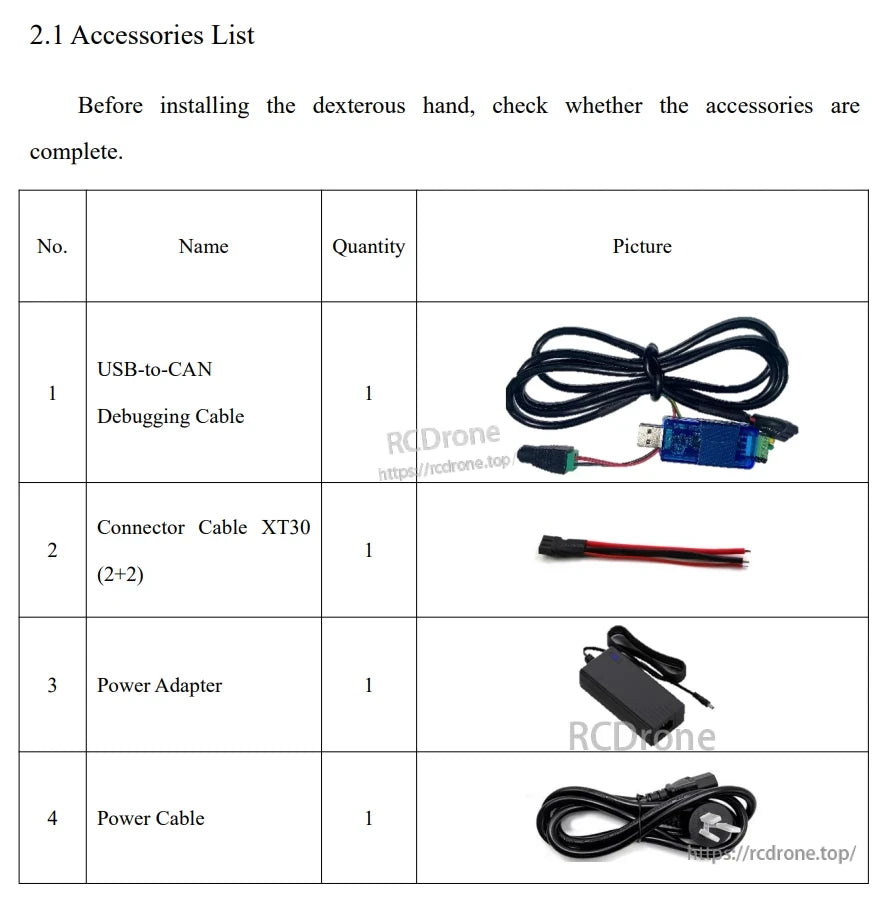
靈巧手安裝的配件清單:USB轉CAN電纜、XT30連接器、電源適配器和電源電纜,每種數量為一個。













