







LINKERBOT Linker Hand O6 機械手,6自由度,11關節,CAN/RS485,130N抓力,±0.2mm精度,DC24V±10%
LINKERBOT Linker Hand O6 機械手,6自由度,11關節,CAN/RS485,130N抓力,±0.2mm精度,DC24V±10%
LINKERBOT
無法載入取貨服務供應情況
概述
LINKERBOT Linker Hand O6 是一款設計用於緊湊集成和精確操作的機器手。它提供 6 自由度,擁有 11 個關節(6 個主動 + 5 個被動),螺旋齒輪傳動以實現穩定的驅動,CAN/RS485 控制,並可選擇觸覺感應。靈活的結構在 DC24V±10% 的工作電壓下提供高達 130N 的五指抓握力,重複定位精度為 ±0.2mm。輕量化的 370g 結構和小型佔地面積支持物流處理、工業組裝和不規則形狀的抓取場景。
主要特點
緊湊 &和靈活
緊湊的結構設計減少了設備負載,同時增強了在狹小空間中精確抓取的靈活性。
高耐用性
採用鋁合金製成,輕巧堅固且耐磨,支持長期穩定性能。
設備-雲端整合
設備-雲端整合通過基於雲端的技能庫實現快速部署,簡化操作和自定義。
規格
| 型號 | LINKERBOT Linker Hand O6 |
| 自由度 (DoF) | 6 |
| 關節數量 | 11 (6 主動 + 5 被動) |
| 傳動模式 | 螺旋齒輪傳動 |
| 控制介面 | CAN/RS485 |
| 重量 | 370克 |
| 最大負載 | 30公斤 |
| 工作電壓 | DC24V±10% |
| 重複定位精度 | ±0.2mm |
| 觸覺感應器 | 可選擇 |
| 最大拇指尖力 | 28N |
| 四指尖的最大力量 | 33N |
| 五指的最大握力 | 130N |
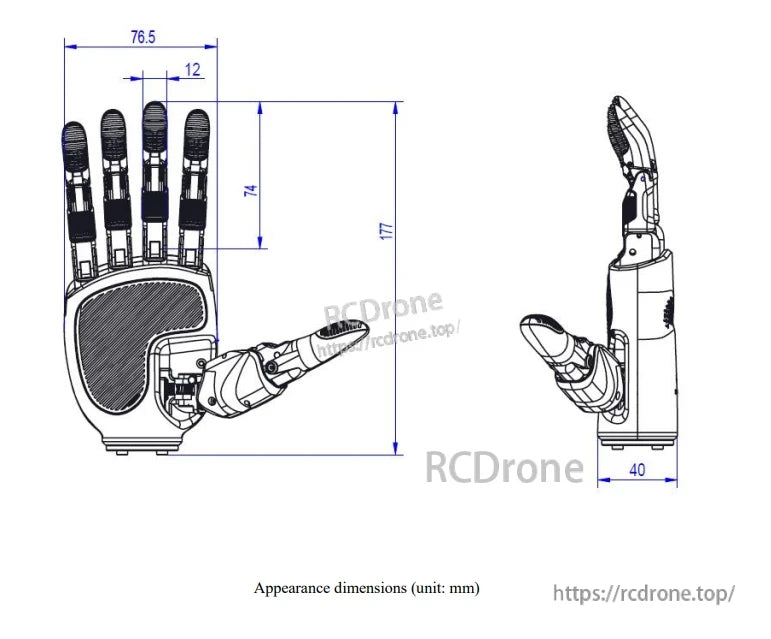
| 尺寸(外觀) | 高度 177mm;寬度 76。5mm; 厚度 40mm |
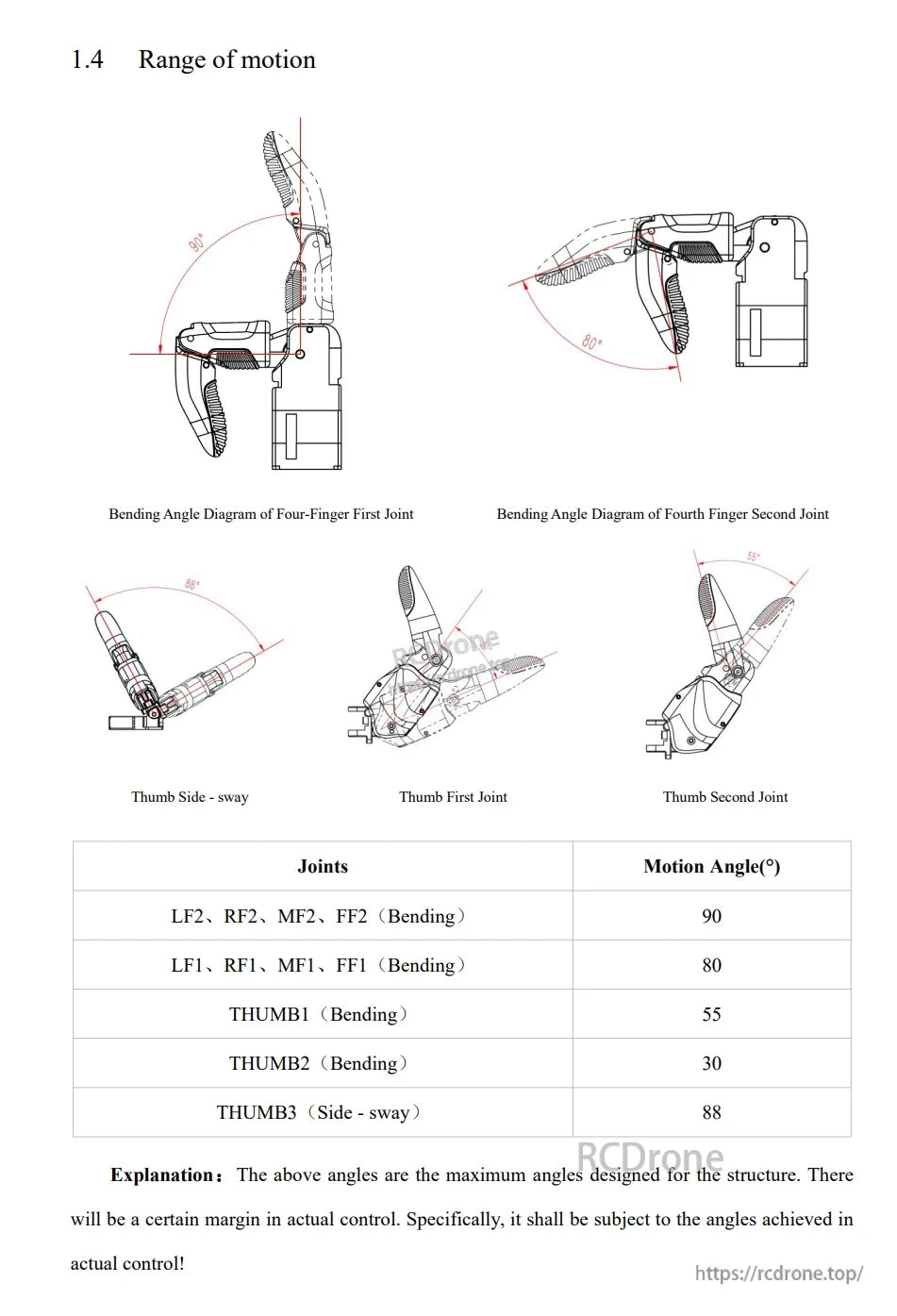
活動範圍
| LF2, RF2, MF2, FF2 (彎曲) | 90° |
| LF1, RF1, MF1, FF1 (彎曲) | 80° |
| THUMB1 (彎曲) | 55° |
| THUMB2 (彎曲) | 30° |
| THUMB3 (側向 - 擺動) | 88° |
包含內容
- USB轉CAN調試線 ×1
- 連接線 XT30 (2+2) ×1
- 電源適配器 ×1
- 電源線 ×1
- 連接手 O6 x1
如需銷售或技術支持,請聯繫 [email protected] or 或訪問 https://rcdrone.top/。
應用
- 物流處理和物料轉移
- 工業組裝和工具操作
- 穩定抓取不規則形狀和消費品
手冊
Linker_Hand_O6_Product_Manual.pdf
詳情

Linker Hand O6 提供 6 個主動關節和 5 個被動關節,實現精確、強力的抓握。緊湊耐用的鋁合金設計適合物流、組裝和不規則抓取。具備雲端整合,便於無需編碼的 AI 訓練。


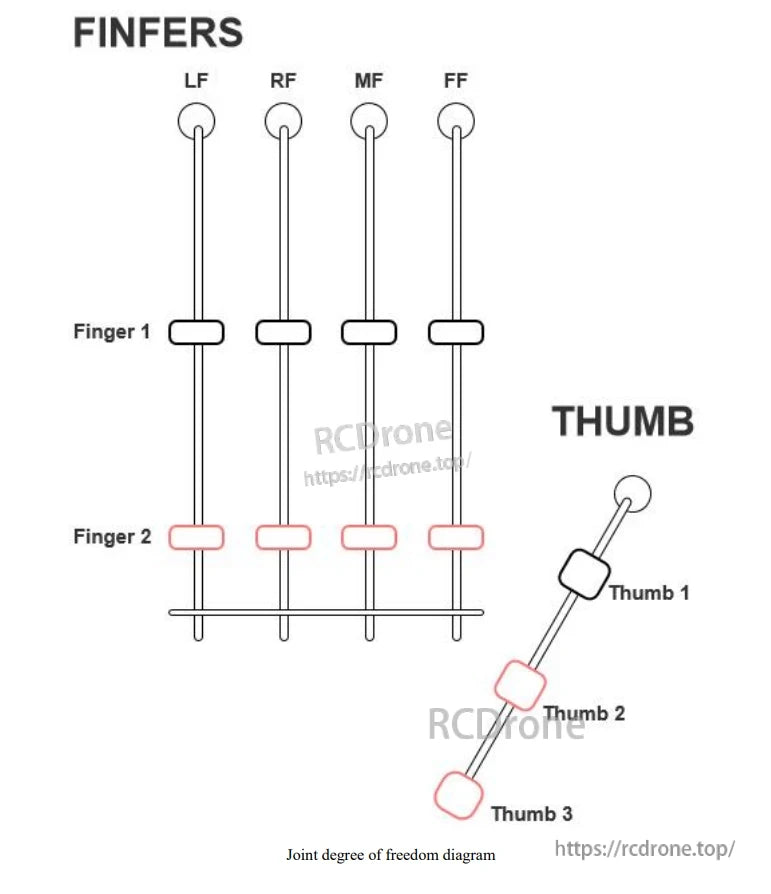
手指和拇指關節自由度圖
手指彎曲 80–90°,拇指彎曲 30–55°,側向擺動達 88°。這些是設計的最大角度;實際控制可能會略有不同。
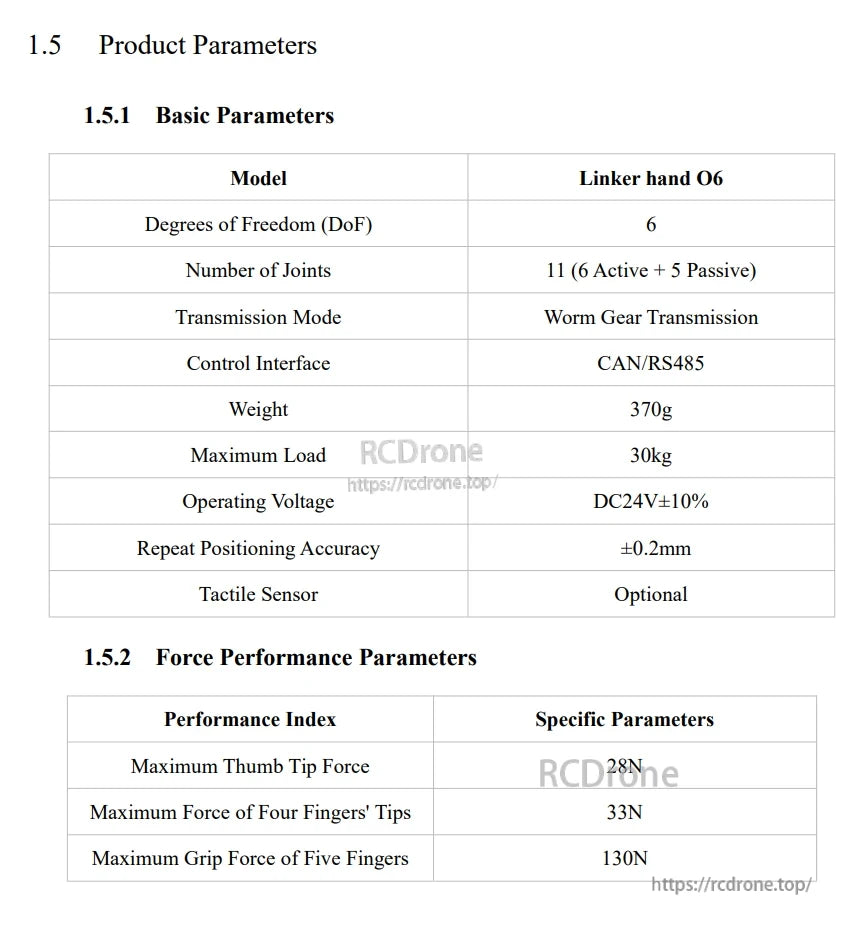
Linker Hand O6 機器手臂擁有 6 自由度,11 個關節,螺旋齒輪傳動,CAN/RS485 控制,重量 370 克,最大承載 30 公斤,工作電壓 DC24V±10%,精度 ±0.2 毫米,並提供可選的觸覺傳感器,具備特定的力性能。

靈巧手安裝的配件清單:USB轉CAN電纜、XT30連接器、電源適配器和電源電纜——每種數量均為一個。







