




LKMTECH MG4005E-i10-V3 行星齒輪馬達,24V 1:10 PG4210,RS485/CAN 雙編碼器
LKMTECH MG4005E-i10-V3 行星齒輪馬達,24V 1:10 PG4210,RS485/CAN 雙編碼器
LKMTECH
定價
$173.00 USD
定價
售價
$173.00 USD
單價
每
已包含稅額。
結帳時計算運費。
無法載入取貨服務供應情況
概述
這款LKMTECH MG4005E-i10-V3 馬達是一款行星齒輪馬達 ,專為需要緊湊齒輪、閉環反饋和總線通信的機器人運動和自動化關節而設計。它集成了一個行星齒輪減速器 (PG4210, 1:10) 和雙絕對磁性編碼器(馬達側 + 減速器側),以實現精確控制。
主要特點
- 行星齒輪馬達:高功率、大扭矩和高精度
- 無刷馬達 + 高精度行星齒輪減速器
- FOC 控制(需要驅動器/驅動裝置)
- 雙編碼器:18位單圈絕對磁性編碼器(馬達側) + 14位單圈絕對磁性編碼器(減速器側)
- 減速器側編碼器支持輸出單圈的絕對值,並在斷電後記住零點
- RS485 或 CAN 總線通信
- 支持通過 PC 軟件進行參數調整、測試和固件升級
- 支持開源開發平台:PC、MCU、PLC、工業電腦和樹莓派
- 支持多種控制模式:扭矩模式、速度模式、多圈控制模式、單圈位置 + 方向模式、增量位置模式、多圈控制模式(帶速度限制)、單圈位置 + 方向模式(帶速度限制)、增量位置模式(帶速度限制)
- 雙溫度傳感器接口實時監控電機和驅動器的溫度
- 保留剎車功能(剎車 / 剎車釋放)
- 列出多重保護功能:UVP、OVP、DTP、MTP、OCP、SCP、MSP、LIP
如需集成支持和售前確認,請聯繫 https://rcdrone.top/ 或發送電子郵件至 [email protected].
規格
| 項目名稱 | MG4005E-i10-V3 |
| 額定電壓 | 24V |
| 最大速度 | 320RPM |
| 額定扭矩 | 1 N.m |
| 額定速度 | 255RPM |
| 額定電流 | 1.8A |
| 最大功率 | 65W |
| 最大扭矩 | 2.5 N.m |
| 速度常數 | 106.3rpm/V |
| 扭矩常數 | 0.06 N.m/A |
| 圈數 | 28 |
| 繞組類型 | Y |
| 相阻抗 | 1.4Ω |
| 相電感 | 0.5mH |
| 電機極數 | 28 |
| 轉子慣性 | 140gcm² |
| 電機溫度 | 是 |
| 減速器類型 | PG4210 |
| 減速比 | 1:10 |
| 間隙 | ≤10弧分 |
| 軸承額定負載 | 1000N |
| 電機重量 | 183g |
| 推薦驅動 | DG40E |
| 驅動輸入電壓 | 7.4-32V |
| 通訊 | RS485 或 CAN |
| 通訊頻率 | RS485: 500Hz (115200bps) / CAN: 2KHz (1Mbps) |
| 編碼器 | 18位元 (馬達) + 14位元 (減速器) 磁性編碼器 |
| 編碼器波特率 (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| 波特率 (CAN) | 100K, 125K, 250K, 500K, 1M |
| 控制模式 | 扭矩迴路 (24KHz) / 速度迴路 (8KHz) / 位置迴路 (4KHz) |
| 加速曲線 | 梯形加速 |
介面定義
| 介面 | 注意 |
|---|---|
| A/H | RS485-A 或 CAN-H |
| B/L | RS485-B 或 CAN-L |
| V- | 負電源 |
| V+ | 正電源 |
| A/H | RS485-A 或 CAN-H |
| B/L | RS485-B 或 CAN-L |
| T | UART 發射器 |
| R | UART 接收器 |
| G | 信號接地 |
應用
- 類人機器人
- 機械手臂
- 外骨骼 / 可穿戴機器人
- 四足機器人 / 機器狗
- AGV 車輛 / AGV 車
- ARU 機器人
手冊 / 檔案
詳情

MG4005E-i10-V3 結合了無刷 馬達和行星減速器,具有緊湊的形式,適用於機器人關節和自動化軸。

雙單圈絕對磁性編碼器提供馬達端和輸出端的反饋,並配有專用的ID開關以便於總線設置。
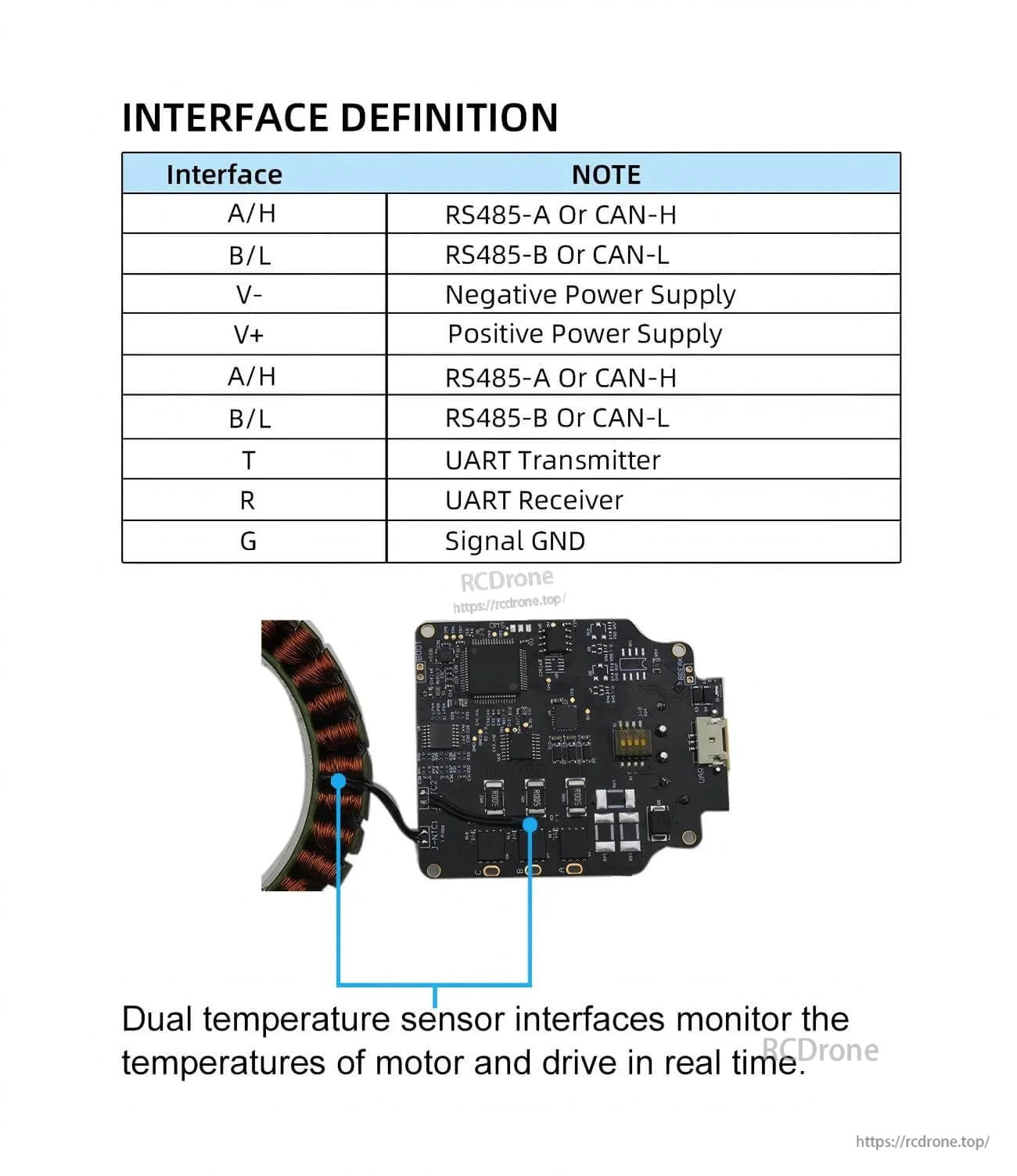
接線簡化,明確定義的端子用於電源、RS485/CAN通信和UART信號連接。
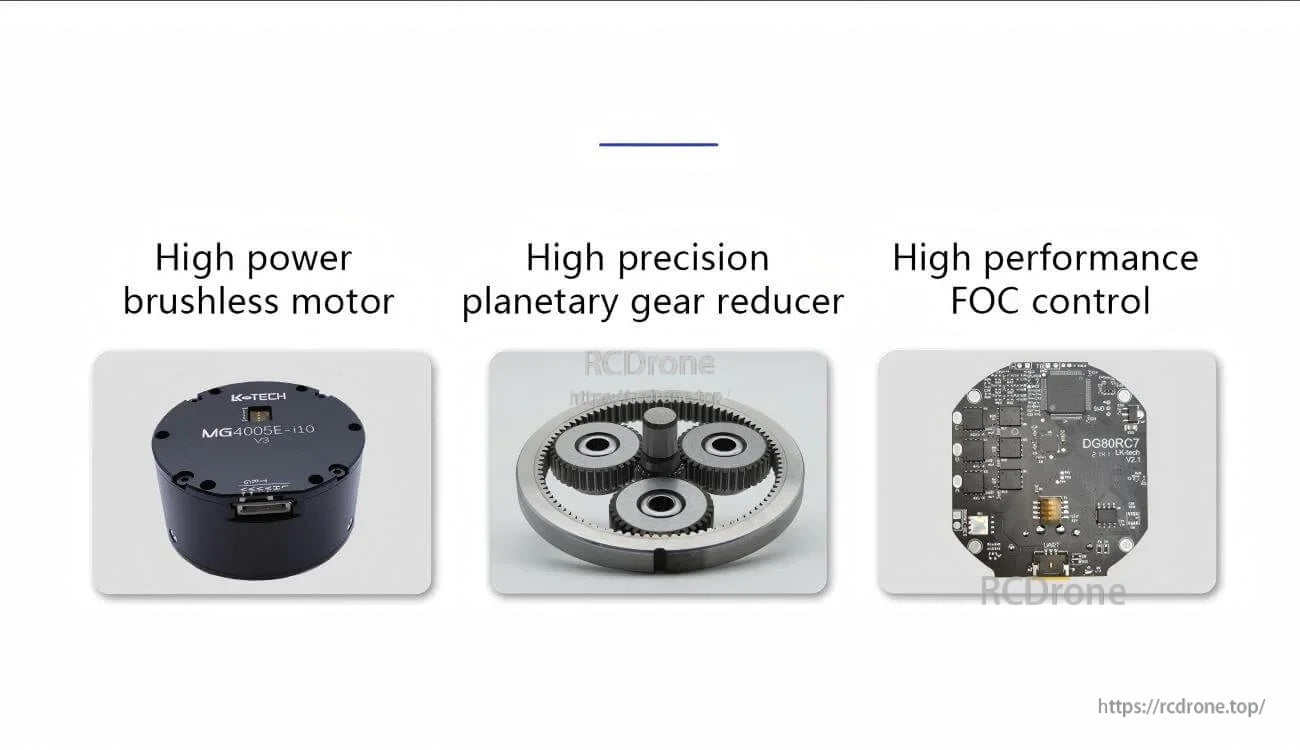
無刷馬達、精密行星齒輪和FOC控制支持平穩的扭矩輸出和精確的運動控制。

驅動器支持RS485或CAN通信,並具有寬輸入電壓範圍(7.4–32V),以便靈活集成。
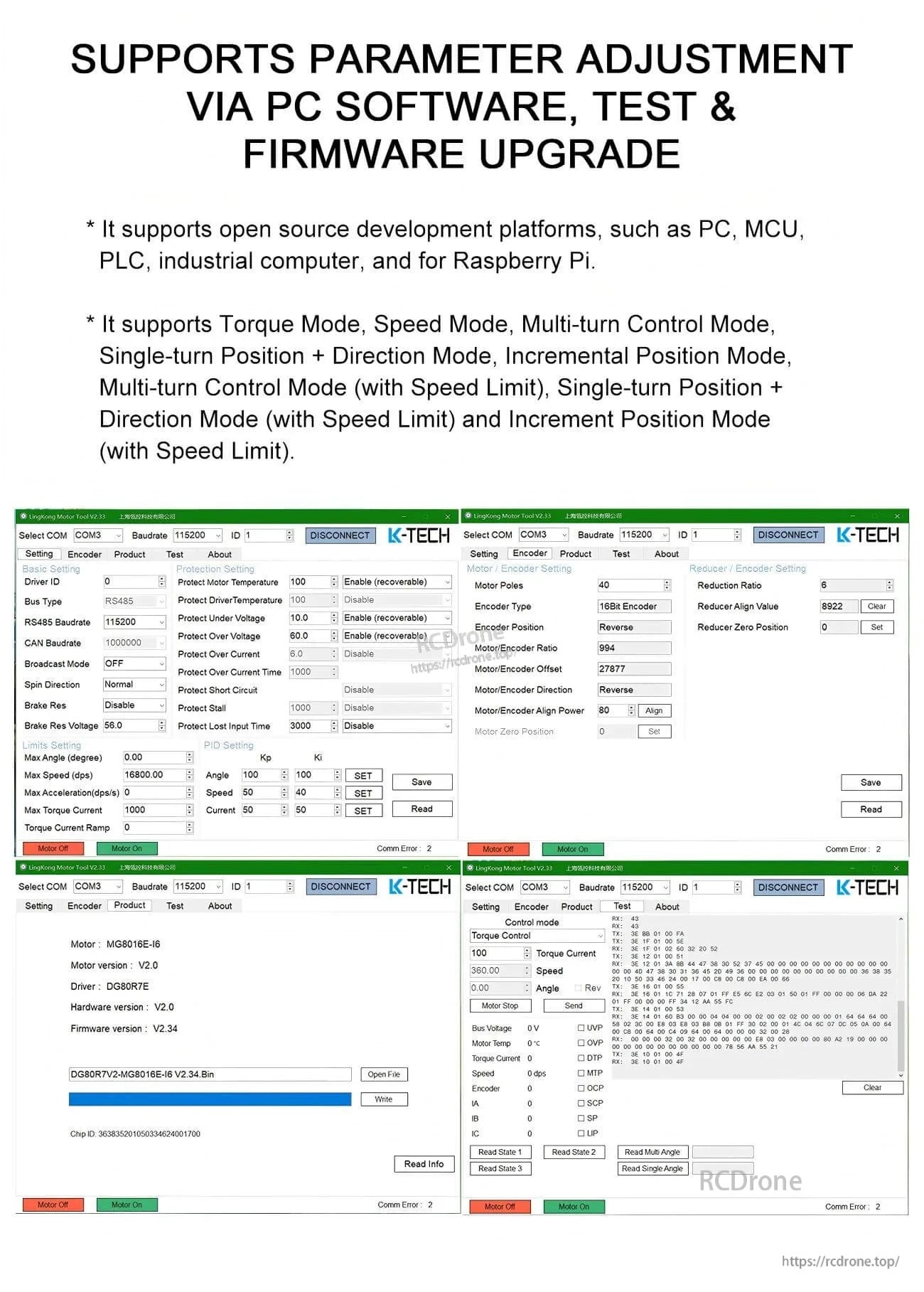
PC軟件允許在調試和維護期間進行參數調整、功能測試和固件升級。
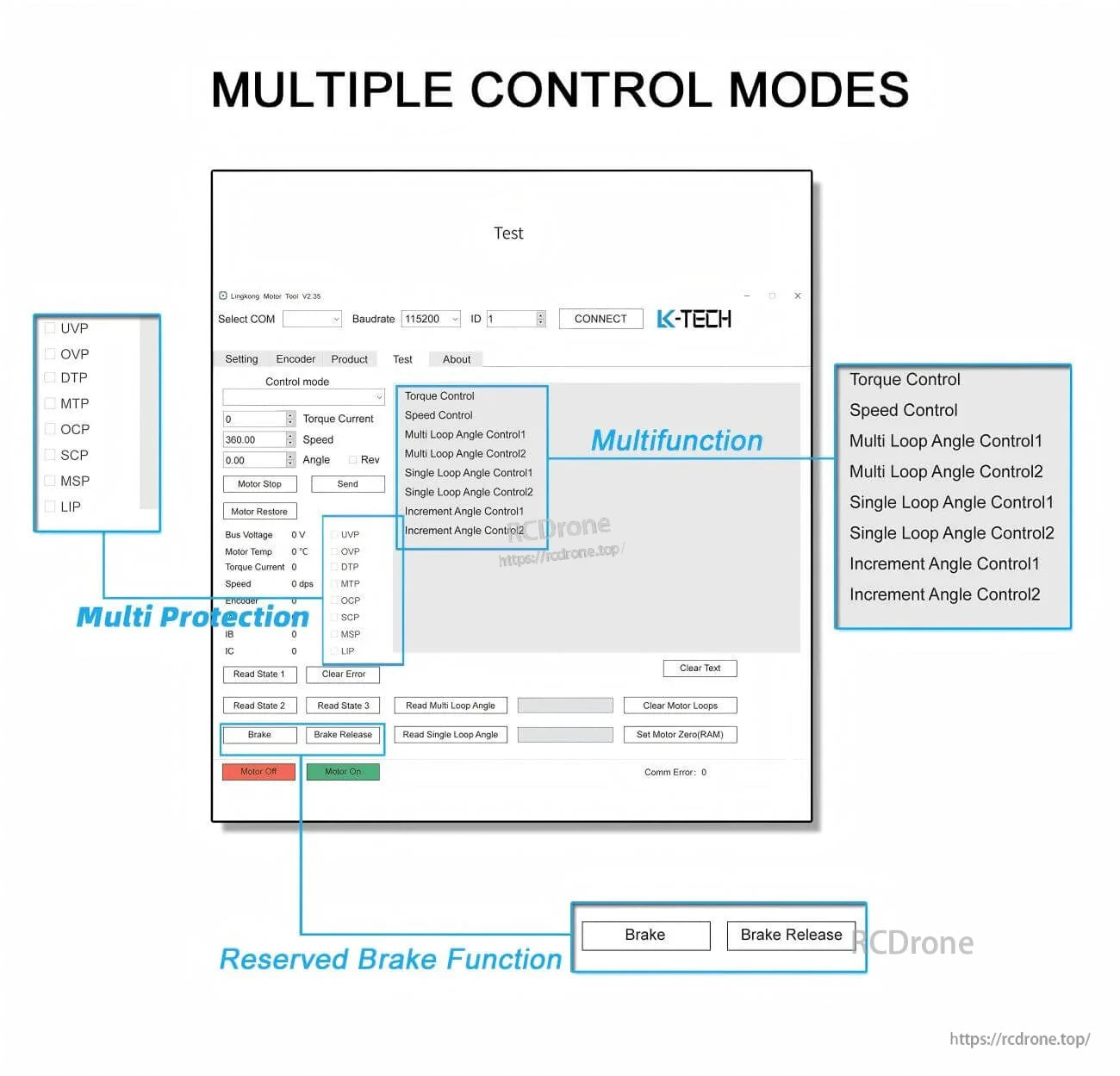
可選擇多種控制模式,如扭矩、速度和位置控制,並內建保護狀態監控。
設計用於移動機器人、關節臂、四足機器人和可穿戴機器人的緊湊驅動。
Related Collections




