




LKMTECH MG4010E-i36B-V3 馬達 24V 1:36 行星齒輪馬達 含剎車,RS485/CAN,磁性編碼器
LKMTECH MG4010E-i36B-V3 馬達 24V 1:36 行星齒輪馬達 含剎車,RS485/CAN,磁性編碼器
LKMTECH
定價
$467.00 USD
定價
售價
$467.00 USD
單價
每
已包含稅額。
結帳時計算運費。
無法載入取貨服務供應情況
概述
該LKMTECH MG4010E-i36B-V3 馬達是一款行星齒輪馬達 ,具備集成剎車和編碼器反饋,專為需要精確扭矩/速度/位置控制和緊湊集成的機器人驅動設計。它支持RS485或CAN通信,並配備PG4210減速器(1:36)和雙磁性編碼器(18位馬達 + 14位減速器)。
主要特點
- 行星減速器:PG4210,減速比1:36,回程間隙≤12弧分
- 編碼器:18位(馬達) + 14位(減速器)磁性編碼器
- 通信:RS485或CAN
- 控制迴路:扭矩迴路(32KHz)/ 速度迴路(8KHz)/ 位置迴路(4KHz)
- 加速曲線:梯形加速
- 剎車:BG4906,剎車扭矩0.6N。
- 馬達溫度: 是
技術規格
| 項目名稱 | MG4010E-i36B-V3 |
| 額定電壓 | 24V |
| 最大速度 | 90RPM |
| 額定速度 | 77RPM |
| 額定扭矩 | 6N.m |
| 最大扭矩 | 13N.m |
| 額定電流 | 2.4A |
| 最大功率 | 132W |
| 速度常數 | 3rpm/V |
| 扭矩常數 | 2.58N.m/A |
| 圈數 | 14 |
| 繞組類型 | Y |
| 相電阻 | 0.68Ω |
| 相電感 | 0.25mH |
| 馬達極數 | 28 |
| 轉子慣性 | 158gcm² |
| 馬達溫度 | 是 |
| 減速器類型 | PG4210 |
| 減速比 | 1:36 |
| 間隙 | ≤12弧分 |
| 軸承額定負載 | 1120N |
| 馬達重量 | 542.5g |
| 剎車類型 | BG4906 |
| 剎車扭矩 (N.m) | 0.6N.m |
| 啟動電壓 (V) | 24V |
| 持續電壓 (V) | 7V |
| 持續功率 (W) | 1.4W |
| 推薦驅動 | DG40E |
| 驅動輸入電壓 | 7.4-32V |
| 通訊 | RS485 或 CAN |
| 通訊頻率 | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| 編碼器 | 18位元(馬達)+14位元(減速機) 磁性編碼器 |
| 編碼器波特率 (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| 波特率 (CAN) | 100K, 125K, 250K, 500K, 1M |
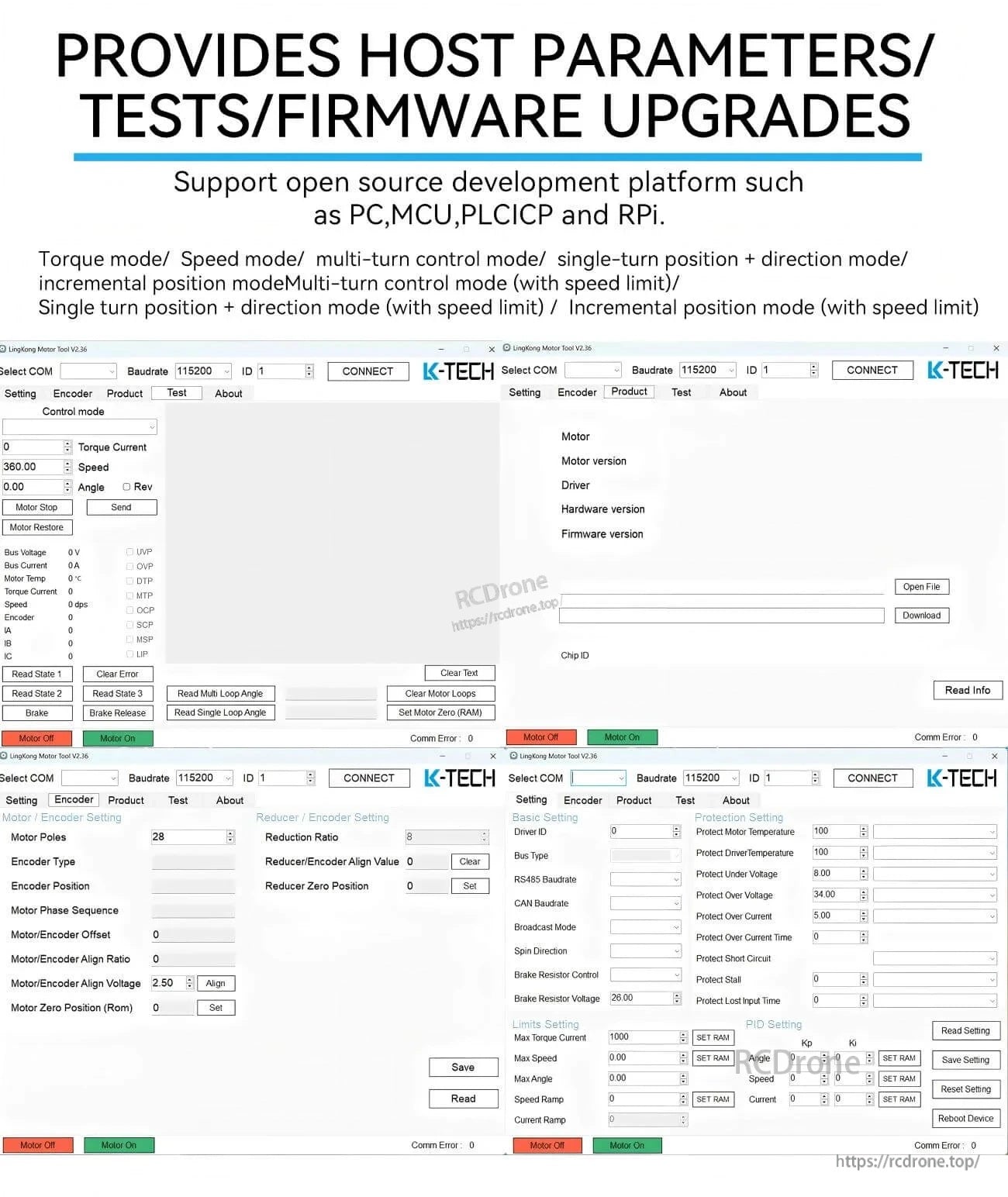
| 控制模式 | 扭矩迴路(32KHz)/速度迴路(8KHz)/位置迴路(4KHz) |
| 加速曲線 | 梯形加速 |
介面定義 (端口)
此馬達系列的端口含義如下:
- A/H: RS485-A 或 CAN-H
- B/L: RS485-B 或 CAN-L
- V-: 負電源
- V+: 正電源
- T: UART 發射器
- R: UART 接收器
- G: 信號接地
- ID 開關
應用
- 人形機器人
- 機械手臂
- 外骨骼
- 四足機器人
- 自動導引車輛
- ARU 機器人
手冊 / 文件
如需整合支援和售前相容性檢查,請聯繫 [email protected] or 訪問 https://rcdrone.top/.
詳細

緊湊的行星齒輪馬達機身將剎車和板載接口整合在一個執行器包裝中。
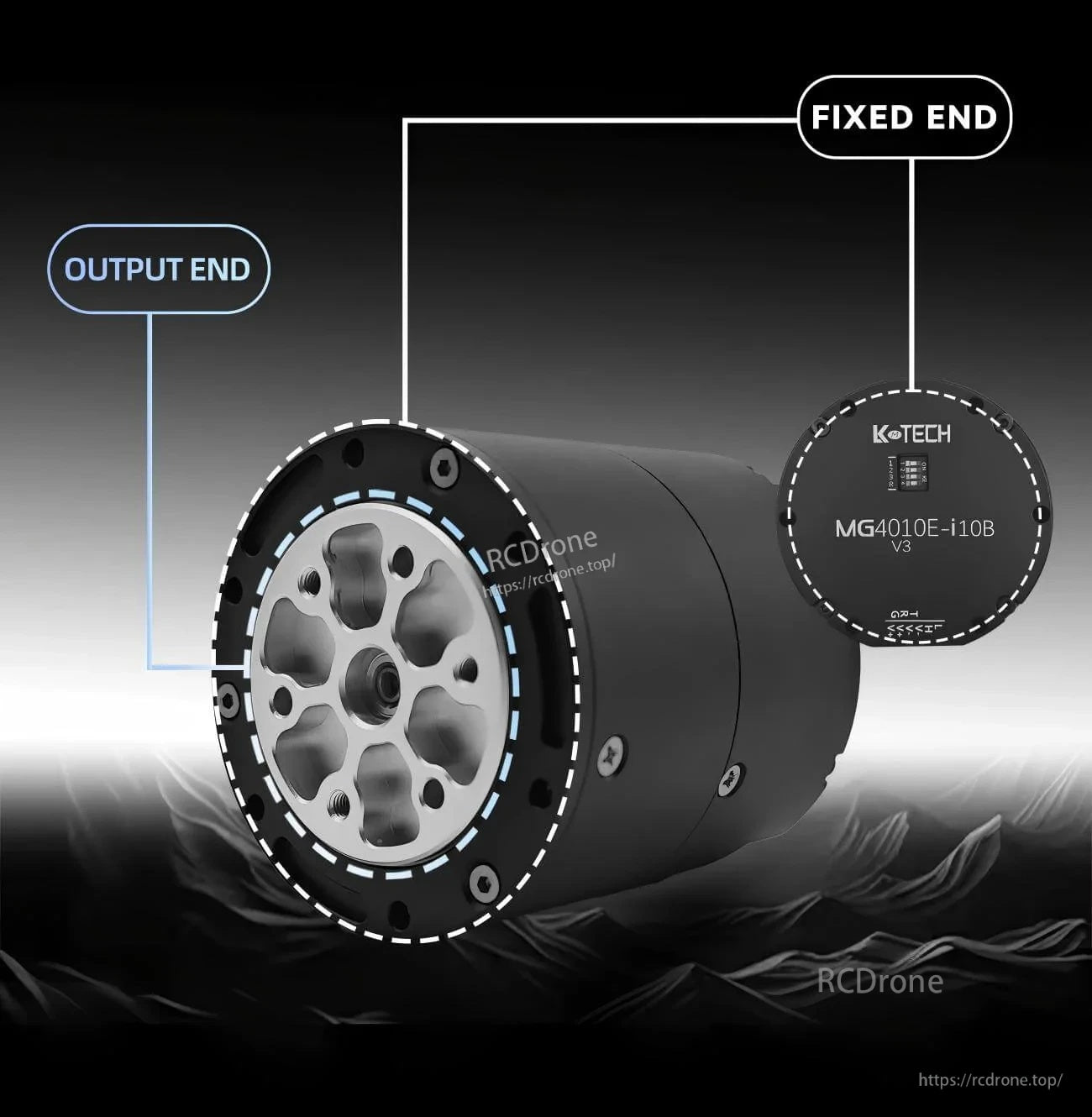
明確定義的輸出端和固定端有助於簡化機械整合和組裝中的對齊。

編碼器反饋和總線通信支持穩定的扭矩、速度和位置控制,用於機器人關節。
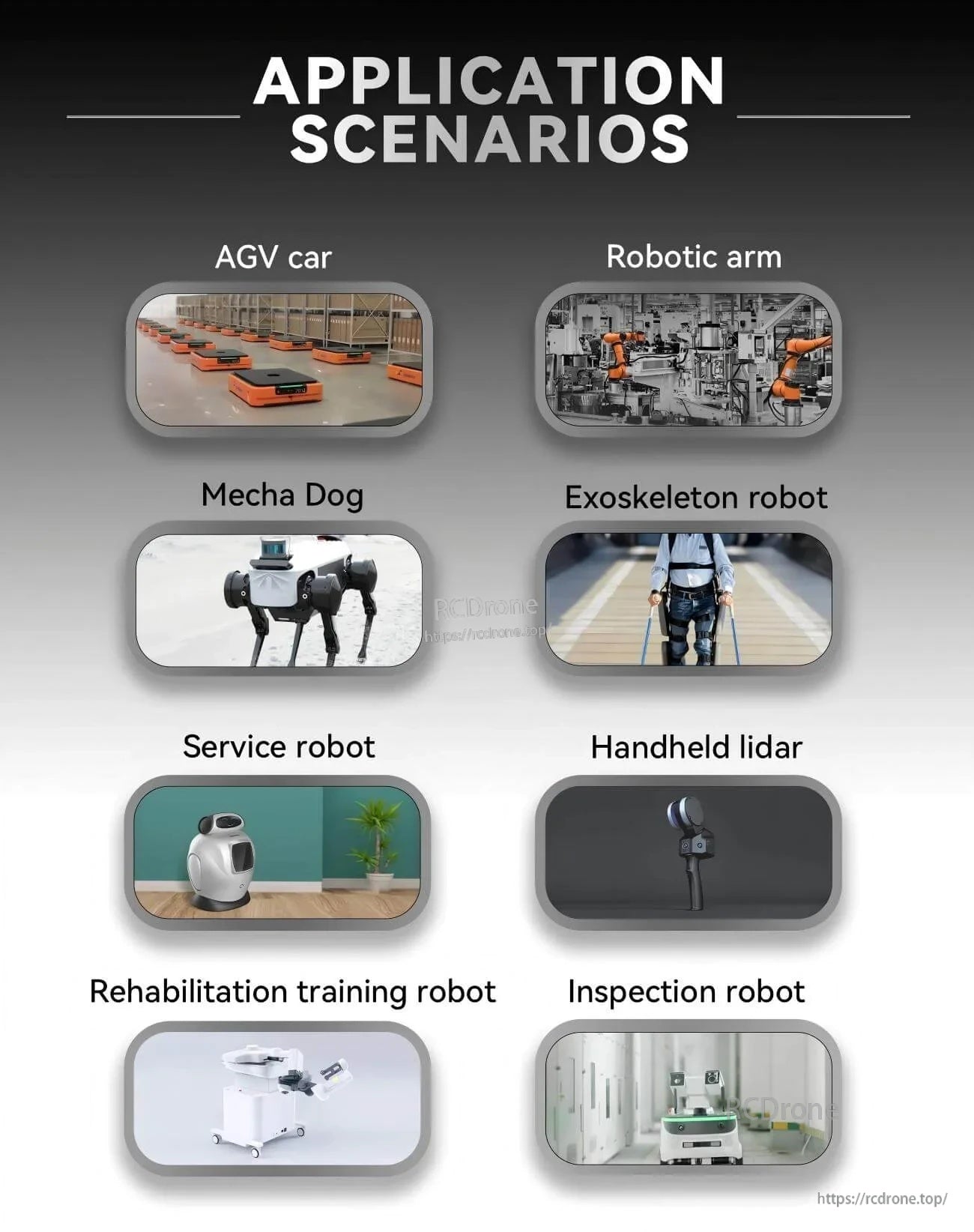
設計用於從自動導引車(AGV)和機器手臂到腿式機器人和外骨骼系統的機器人驅動任務。
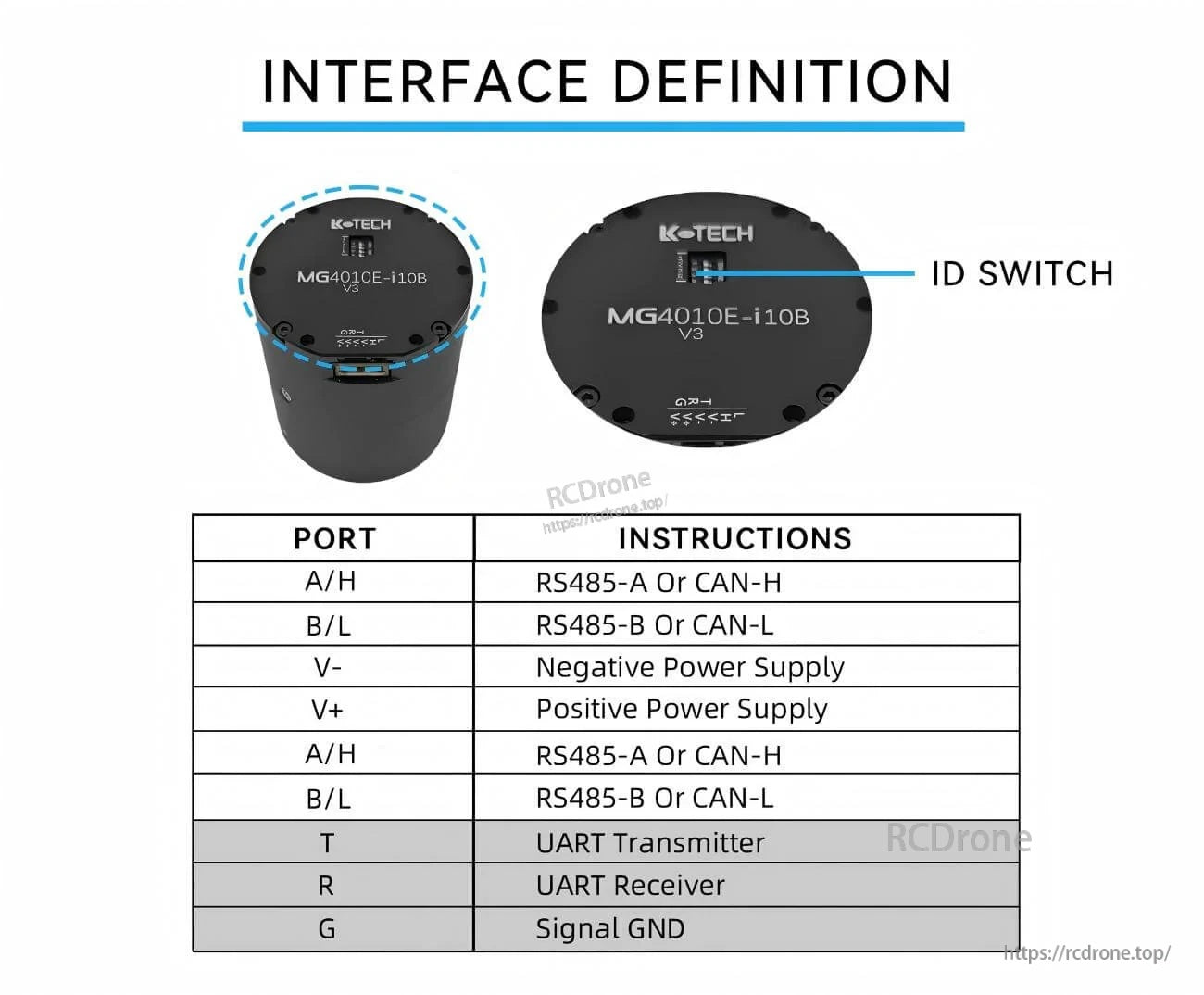
端口定義涵蓋電源、RS485/CAN接線和UART引腳,並配有板載ID開關以便於尋址。

Related Collections




