




LKMTECH MG6012E-i8B-V3 馬達 48V 行星齒輪馬達 1:8 剎車 RS485/CAN 磁性編碼器
LKMTECH MG6012E-i8B-V3 馬達 48V 行星齒輪馬達 1:8 剎車 RS485/CAN 磁性編碼器
LKMTECH
定價
$761.00 USD
定價
售價
$761.00 USD
單價
每
已包含稅額。
結帳時計算運費。
無法載入取貨服務供應情況
概述
這款LKMTECH MG6012E-i8B-V3 馬達是一款兩級行星齒輪馬達 ,配備剎車,專為需要緊湊尺寸、高扭矩輸出和數字通信的機器人和自動化執行器而設計。
主要特點
- 帶剎車的兩級行星齒輪馬達
- 齒輪比:1:8
- 齒輪間隙:弧分(圖片文字);6弧分(規格)
- 馬達尺寸:80*60
- 18位單圈絕對磁性編碼器(圖片文字)
- 編碼器配置:18位(馬達)+ 14位(減速器)磁性編碼器
- 通訊:RS485或CAN
- 推薦驅動器:DG60Ev2;驅動器輸入電壓:12-60V
- 雙編碼器,斷電後記住零點(圖片文字)
- 支持PC、MCU、PLC、ICP和RPi等開源開發平台(圖片文字)
- 控制模式(規格):扭矩迴路(32KHz)/ 速度迴路(8KHz)/ 位置迴路(4KHz)
- 加速曲線:梯形加速
如需選擇指導或整合支持,請聯繫 [email protected] or 訪問 https://rcdrone.top/.
規格
| 項目名稱 | MG6012E-i8B-V3 |
| 額定電壓 | 48V |
| 最大速度 | 310RPM |
| 額定速度 | 256RPM |
| 額定扭矩 | 6N.m |
| 最大扭矩 | 16N.m |
| 額定電流 | 3.5A |
| 最大功率 | 294W |
| 速度常數 | 42.7rpm/V |
| 扭矩常數 | 1.09N.m/A |
| 圈數 | 20 |
| 繞組類型 | Y |
| 相電阻 | 1.3 |
| 相電感 | 0.55mH |
| 馬達極數 | 28 |
| 轉子慣性 | 930gcm2 |
| 馬達溫度 | 是 |
| 減速器類型 | PG4108 |
| 減速比 | 1:8 |
| 間隙 | 6 弧分 |
| 軸承額定負載 | 1800N |
| 馬達重量 | 718g |
| 剎車類型 | MT15 |
| 剎車扭矩 | 1.5N.m |
| 啟動電壓 | 24V |
| 啟動功率 | 17.5W |
| 持續電壓 | 7V |
| 持續功率 | 1.5W |
| 推薦驅動 | DG60Ev2 |
| 驅動輸入電壓 | 12-60V |
| 通訊 | RS485 或 CAN |
| 通訊頻率 | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| 編碼器 | 18位元(馬達)+14位元(減速機)磁性編碼器 |
| 編碼器波特率 (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| 波特率 (CAN) | 100K, 125K, 250K, 500K, 1M |
| 控制模式 | 扭矩迴路(32KHz)/速度迴路(8KHz)/位置迴路(4KHz) |
| 加速曲線 | 梯形加速 |
介面定義 (圖像文字)
- ID 開關
- 負電源
- 正電源
- CAN / RS485 (LH) (AB)
| 端口 | 說明 |
|---|---|
| A/H | RS485-A 或 CAN-H |
| B/L | RS485-B 或 CAN-L |
| V- | 負電源 |
| V+ | 正電源 |
| A/H | RS485-A 或 CAN-H |
| B/L | RS485-B 或 CAN-L |
| T | UART 發射器 |
| R | UART 接收器 |
| G | 信號接地 |
應用
- 人形機器人
- 機械手臂
- 外骨骼
- 四足機器人
- AGV 車輛 / AGV 車
- ARU 機器人
- 機器狗
- 服務機器人
- 手持激光雷達
- 康復訓練機器人
- 檢查機器人
手冊
詳情

一款緊湊的兩級行星齒輪馬達,配備剎車,適用於高扭矩和小型外形的機器人驅動器。
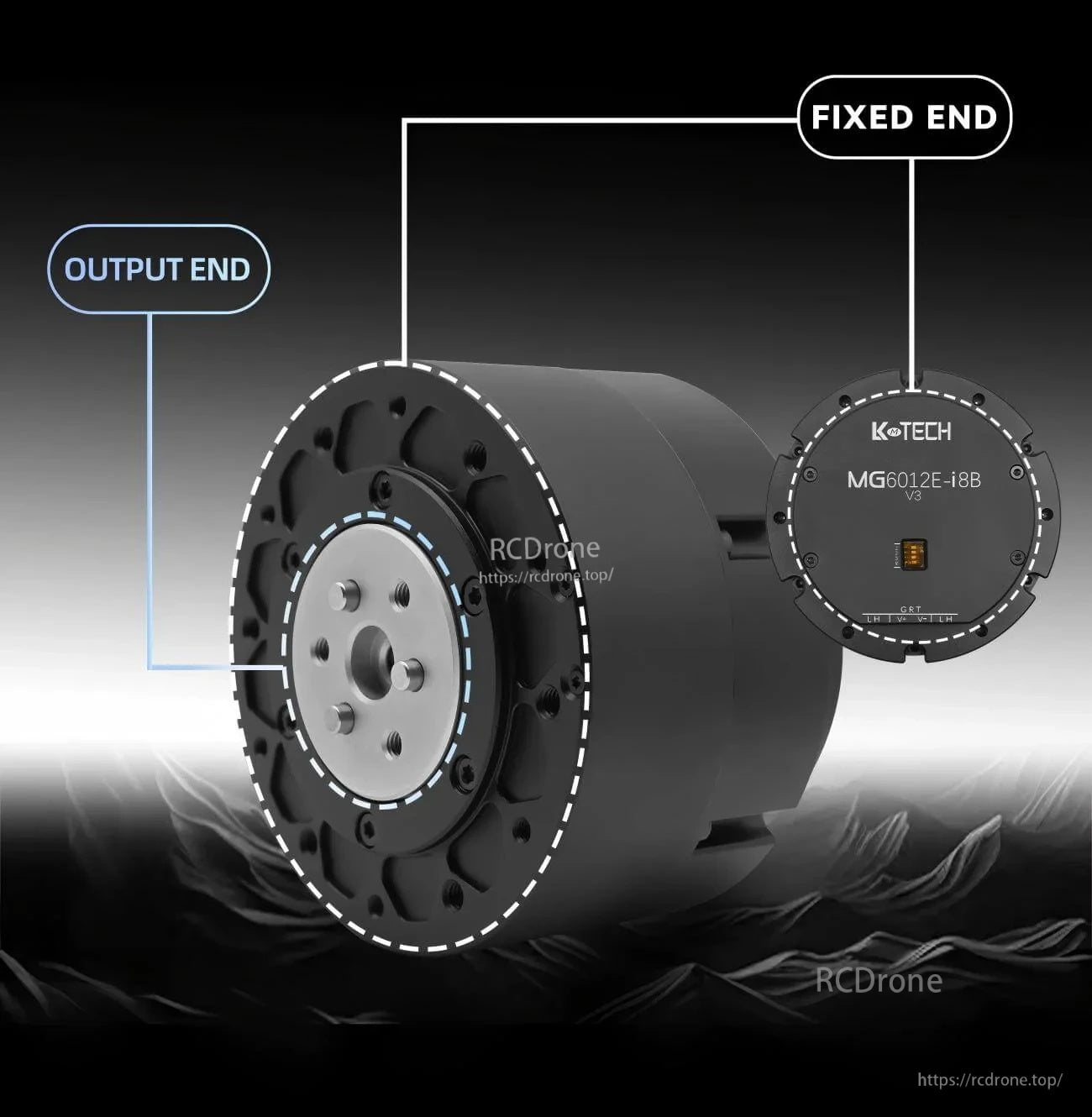
輸出端和固定端均設計為便於在接頭、臂和其他執行器組件中安裝。

18位單圈絕對磁性編碼器和集成制動器支持在負載下的精確控制和穩定保持。
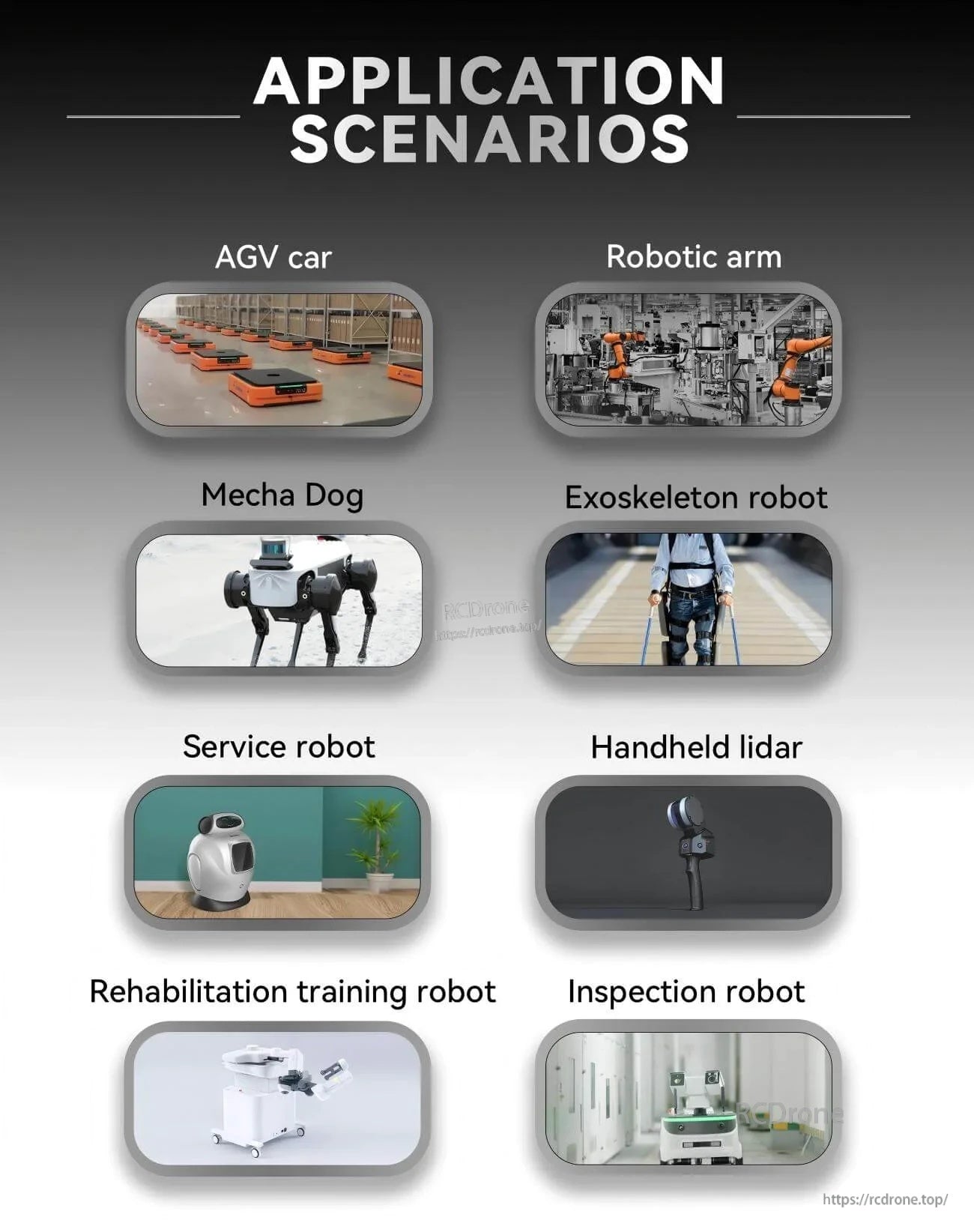
適用於自動化項目,如AGV驅動模塊、機器手臂、四足機器人、外骨骼和檢查機器人。
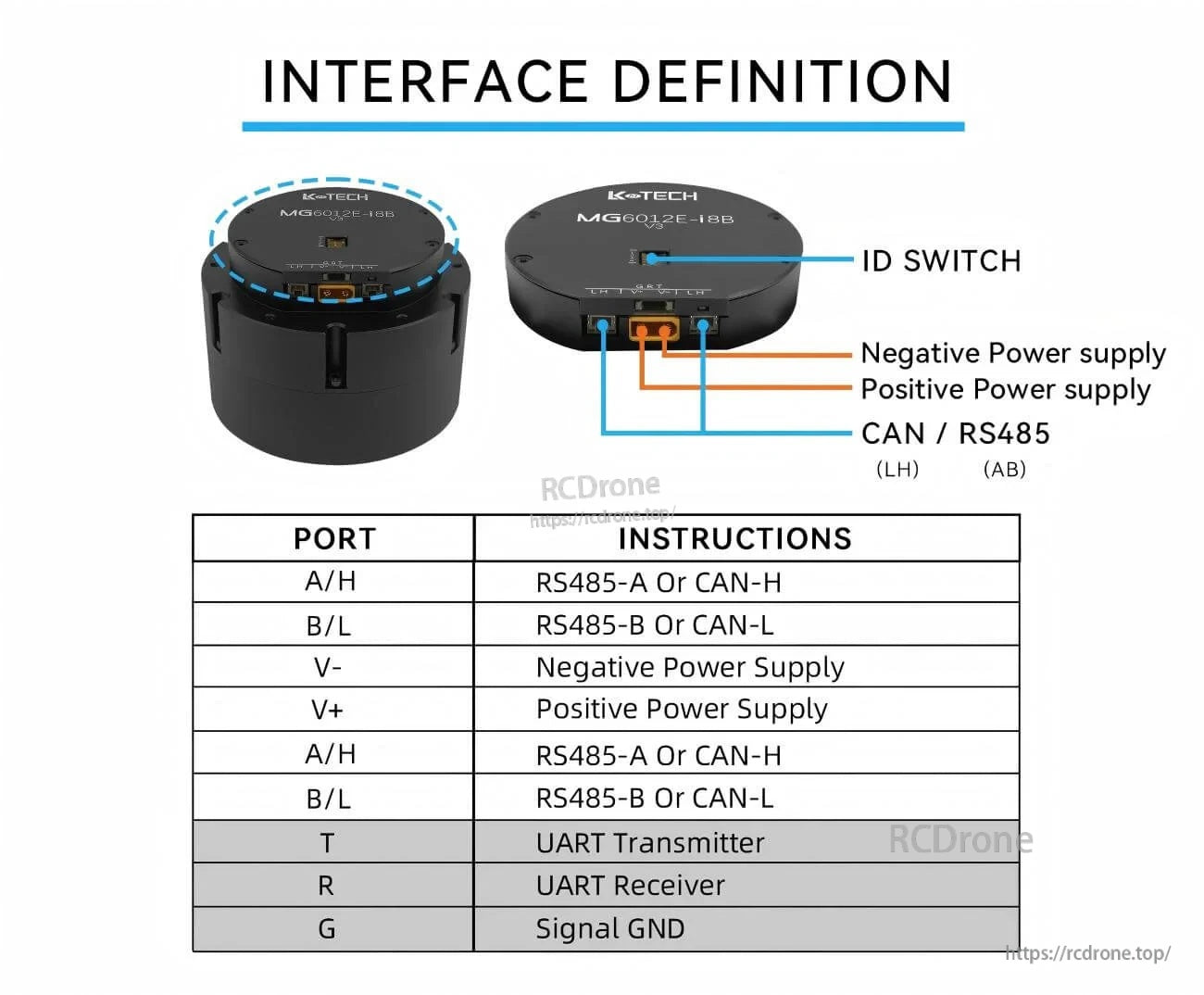
清晰的端口標籤有助於加快電源、ID配置和RS485/CAN通信的接線速度。
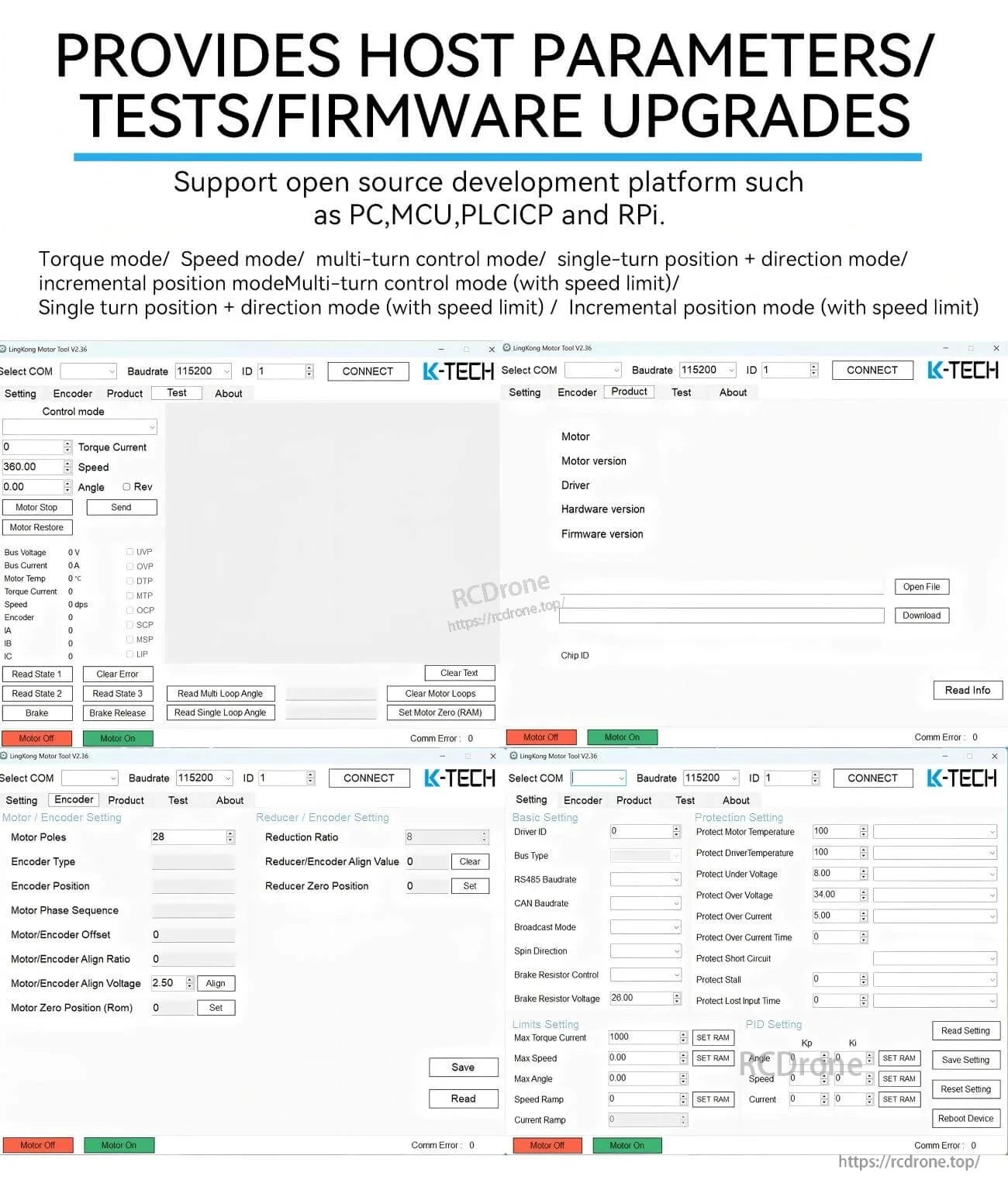
主機工具提供參數配置、測試和固件更新,適用於常見的開發平台。
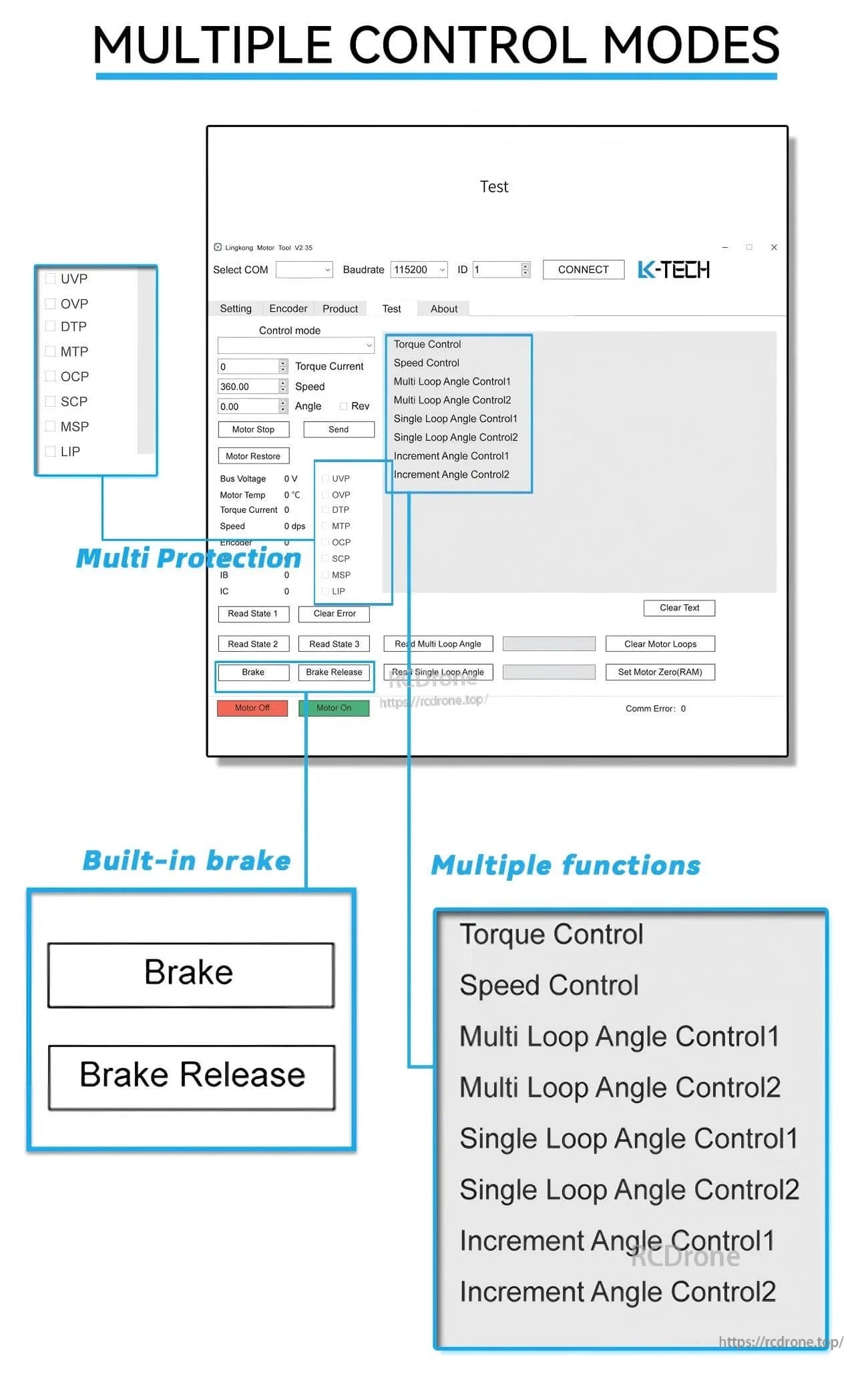
可以選擇扭矩、速度和位置控制模式,以匹配不同的執行器和運動控制需求。

Related Collections




