




LKMTECH MHF6015-V3 馬達 24V 872RPM 3N.m 19位磁編碼器 RS485/CAN 適用於機器人
LKMTECH MHF6015-V3 馬達 24V 872RPM 3N.m 19位磁編碼器 RS485/CAN 適用於機器人
LKMTECH
定價
$190.00 USD
定價
售價
$190.00 USD
單價
每
已包含稅額。
結帳時計算運費。
無法載入取貨服務供應情況
概述
這款LKMTECH MHF6015-V3 馬達是一款24V無刷馬達,配備19位元磁性編碼器和RS485或CAN通訊,專為機器人運動應用而設計,如人形機器人、機器手臂、外骨骼和AGV車輛。
主要特點
- 集成設計:內建驅動板,高性能MCU,主機參數調整,體積小且扭矩大,高精度絕對值編碼器。
- 中空設計;中空尺寸標示為12.7毫米(中空標註內顯示為12.6毫米)。
- 運行平穩;CE認證(如所述)。
- 核心材料聲明:“馬達的核心材料為高品質矽鋼片和高溫強磁永久磁鐵。”
- 外轉子聲明:“外轉子的多級平面設計提供更高的扭矩,適用於空間相關應用。
- 軸承聲明:“無刷結構,配備高性能軸承,實現更平滑的旋轉和更長的壽命。”
- 電流取樣/控制聲明:“高精度,低溫漂白合金電阻取樣,準確的電流控制。”
- 驅動聲明:“全N管三相全橋驅動,低內阻,高電流。”
- 控制聲明:“扭矩閉環,速度,位置控制模式可隨意切換。”
- 主機參數/測試/固件升級聲明;支持PC、MCU、PLC、ICP和RPi等開源開發平台。
- 模式聲明:扭矩模式 / 速度模式 / 多圈控制模式 / 單圈位置 + 方向模式 / 增量位置模式;多圈控制模式(帶速度限制)/ 單圈位置 + 方向模式(帶速度限制)/ 增量位置模式(帶速度限制)。
規格
| 項目名稱 | MHF6015-V3 |
| 轉數 | 25 |
| 額定電壓 | 24V |
| 最大速度 | 872RPM |
| 額定扭矩 | 0.82N.m |
| 額定速度 | 560RPM |
| 額定電流 | 3.1A |
| 最大功率 | 57W |
| 最大扭矩 | 3N.m |
| 速度常數 | 23.3rpm/V |
| 扭矩常數 | 0.26N.m/A |
| 繞組類型 | Y |
| 相電阻 | 2.17Ω |
| 相電感 | 1.44mH |
| 電機極數 | 28 |
| 轉子慣性 | 515gcm² |
| 電機溫度 | 是 |
| 軸承額定負載 | 280N |
| 電機重量 | 251g |
| 推薦驅動器 | DHF50 |
| 驅動輸入電壓 | 7.4-32V |
| 通訊 | RS485 或 CAN |
| 通訊頻率 | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| 編碼器 | 19位磁性編碼器 |
| 編碼器波特率(RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| 波特率(CAN) | 100K, 125K, 250K, 500K, 1M |
| 控制模式 | 扭矩迴路(24KHz)/速度迴路(8KHz)/位置迴路(8KHz) |
| 加速曲線 | 梯形加速 |
如需選擇指導或整合支持,請聯繫客戶服務團隊,電話 https://rcdrone.top/ 或發送電子郵件至 [email protected].
應用
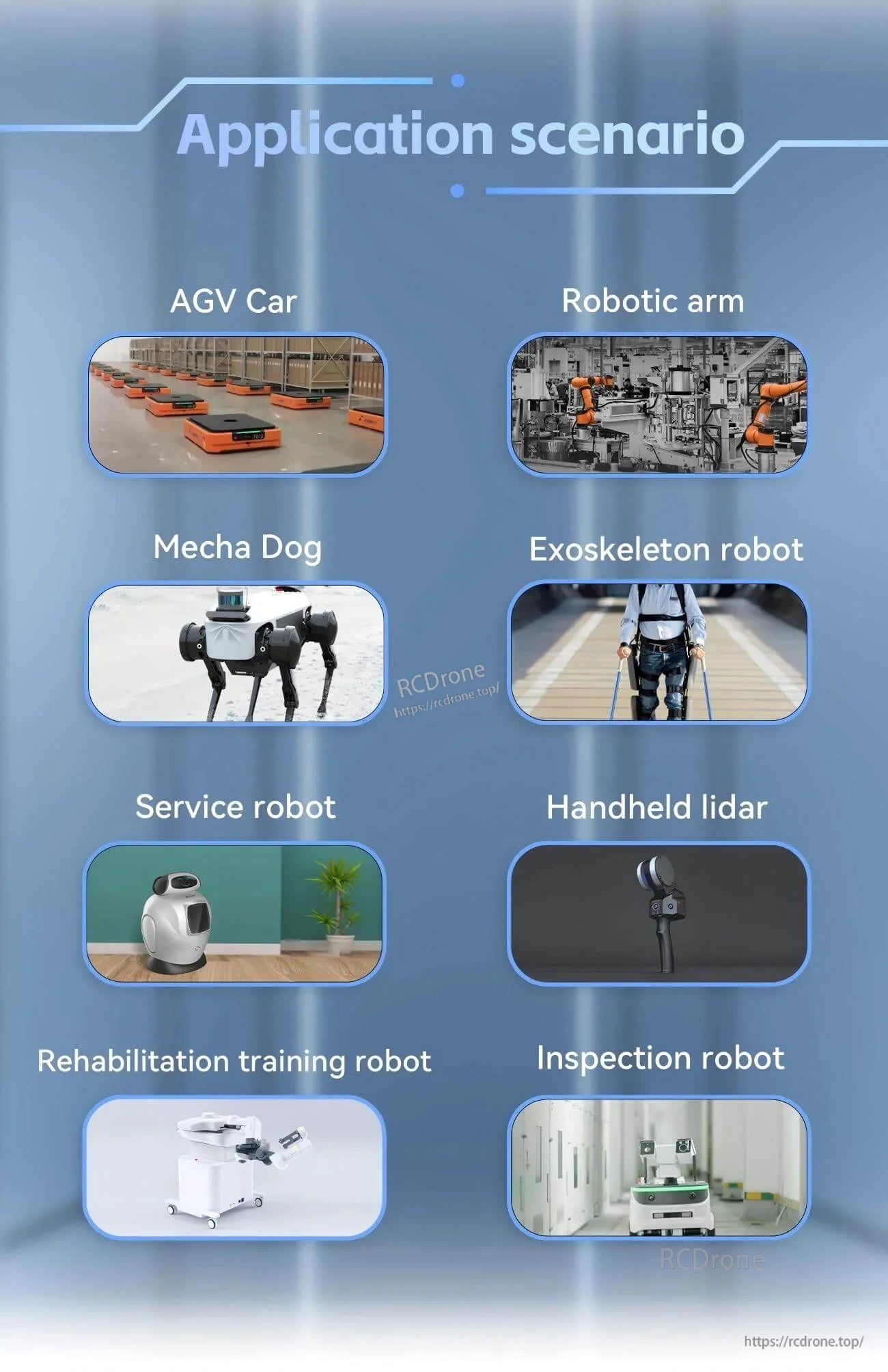
- 類人機器人
- 機械手臂
- 外骨骼 / 外骨骼機器人
- 四足機器人 / 機械狗
- 自動導引車輛 / 自動導引車
- ARU機器人
- 服務機器人
- 手持式激光雷達
- 康復訓練機器人
- 檢查機器人
手冊 / 文件
詳細資訊

緊湊型集成伺服-式馬達格式使機器關節的接線和組裝變得簡單。
集成驅動板和MCU支持從主機進行參數調整,以便於調試。
 中空軸佈局(12.7毫米孔徑)有助於將電纜或軸路由通過馬達,以實現更乾淨的組裝。
中空軸佈局(12.7毫米孔徑)有助於將電纜或軸路由通過馬達,以實現更乾淨的組裝。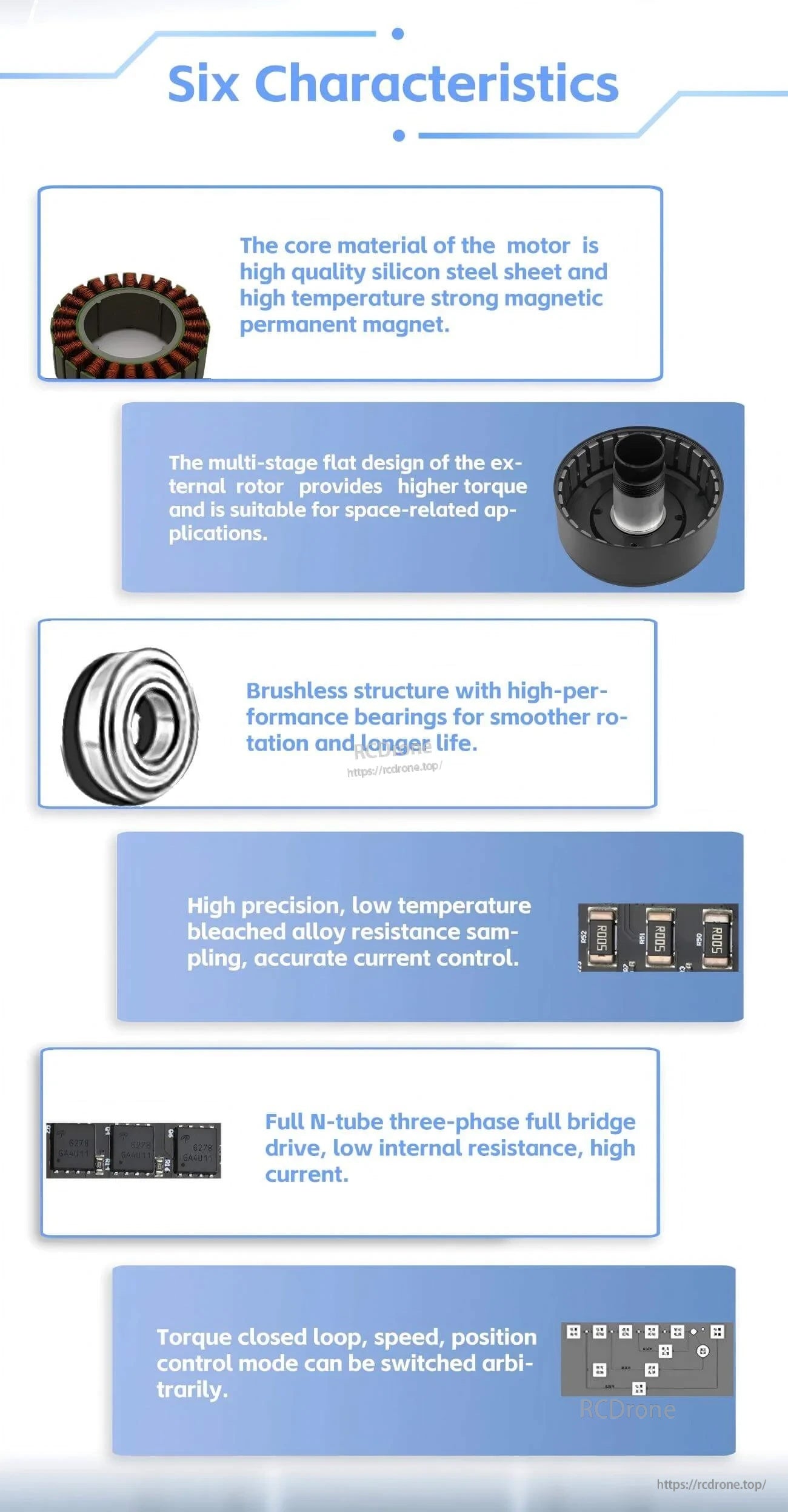
關鍵設計說明涵蓋材料、外轉子扭矩結構、軸承和閉環控制能力。
設計用於機器人運動任務,如自動導引車(AGVs)、機器手臂、四足機器人、外骨骼和服務機器人。
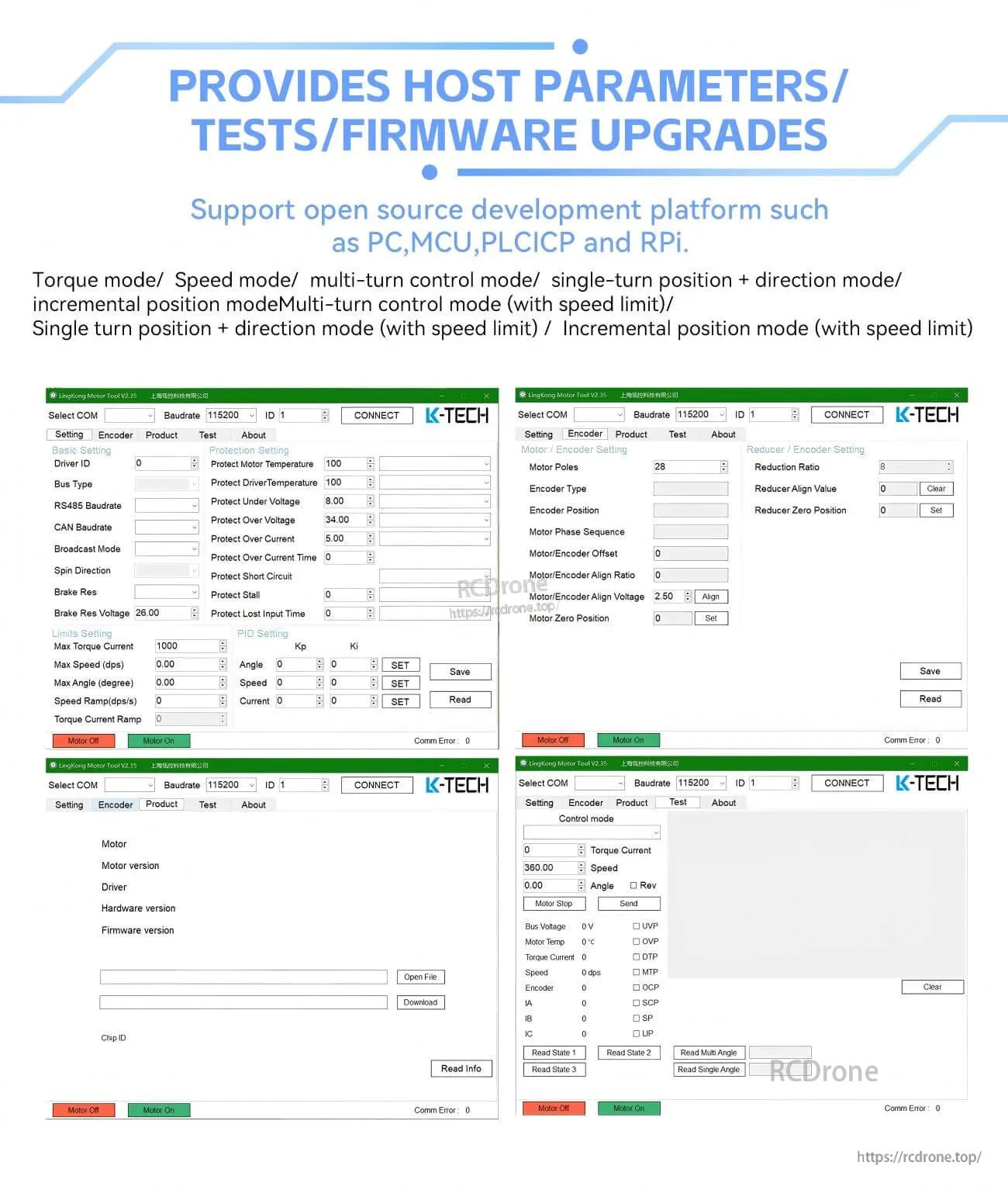
PC軟體頁面說明參數設置、測試功能和韌體升級支持。

Related Collections




