Matek AP Periph CAN 節點 CAN-G474 DroneCAN 轉接板,STM32G474CE 512KB,CANFD 5Mbit/s
Matek AP Periph CAN 節點 CAN-G474 DroneCAN 轉接板,STM32G474CE 512KB,CANFD 5Mbit/s
MATEKSYS
定價
$39.00 USD
定價
售價
$39.00 USD
單價
每
已包含稅額。
結帳時計算運費。
無法載入取貨服務供應情況
概述
這款 AP Periph CAN 節點,Matek AP Periph CAN 節點 CAN-G474,是一個 ArduPilot AP_Periph 轉接節點,旨在通過 5Mbit/s CAN 收發器和 STM32G474 MCU 將外圍設備添加到 DroneCAN 總線。它使得 ArduPilot 支援的傳感器和基於 GPIO 的外圍設備(如 PWM 輸出和 LED 通知模塊)能夠通過 DroneCAN 集成。
主要特點
- 基於 ArduPilot AP_Periph 固件的適配器節點
- 配備 512KB Flash 的 STM32G474CE MCU
- 支持 CAN/CANFD 的 CANFD 硬體,速率範圍從 1Mbit 到 5Mbit
- 2x CAN 總線
- 4x UART 用於 GNSS、測距儀、接近感應器、EFI、RC 輸入(接收器);默認在 TX3 上啟用 MSP 用於 GNSS、指南針、氣壓計通過 MSP
- 2x I2C 總線用於 I2C 外圍設備(空速傳感器、氣壓計、指南針)
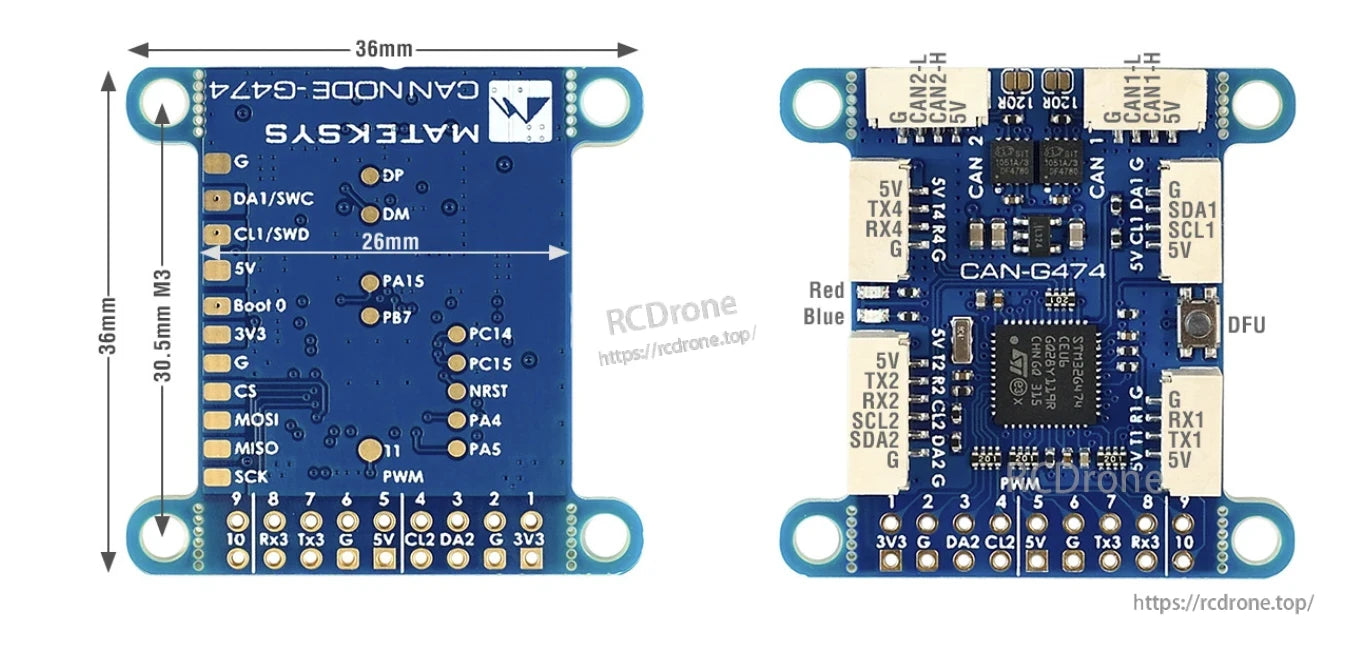
- 1x SPI 用於 RM3100(底部有“CS, MOSI, MISO, SCK”絲印的 SPI 接腳)
- 11x PWM 輸出用於伺服和 ESC;所有 PWM 支持 DMA/DShot(PWM1-10 在 DuPont 2.54mm 孔;底部有“11”絲印的 PWM11 垫片)
- 通過 DroneCAN GUI 工具 / 任務規劃器(DroneCAN 標籤)和通過 STM32CubeProgrammer DFU 模式(UART1)支持固件更新
規格
| MCU | STM32G474CE |
| 閃存 | 512KB |
| CAN 收發器數據速率 | 高達 5Mbit/s |
| CAN / CANFD 支持 | 1Mbit ~ 5Mbit CAN/CANFD |
| CAN 總線 | 2x |
| UART | 4x(默認在 TX3 上啟用 MSP) |
| I2C | 2x |
| SPI | 1x(用於 RM3100) |
| PWM 輸出 | 11x(PWM1-10 在 DuPont 2.54mm 孔;底部的 PWM11 垫片) |
| 除錯 | ST 除錯,SWC & SWD(底部) |
| 韌體更新(DFU) | UART1(TX1,RX1) |
| LED 指示燈 | 藍色快速閃爍:啟動中;藍色慢速閃爍:與飛行控制器通信;紅色:3.3V 指示燈 |
| 輸入電壓範圍 | 4.5~5.5V @5V 垫片/引腳& |
| 功耗 | 62mA |
| 操作溫度 | -30~85 °C |
| 連接器 | 5x JST-GH-4P(SM04B-GHS-TB)用於 CAN1、CAN2、I2C1、UART1、UART4;1x JST-GH-6P(SM06B-GHS-TB)用於 UART3+I2C2 |
| 通孔 | 18x DuPont 2。54mm 孔 |
| 板材尺寸 | 36mm*36mm*6mm |
| 重量 | 5.2g |
| 安裝 | 30.5mm 4x 直徑3mm |
包含內容
- 1x CAN-G474 板
- 2x JST-GH-4P 至 JST-GH-4P 20cm 矽膠線
- 1x JST-GH-6P 至 JST-GH-6P 20cm 矽膠線
客戶服務: https://rcdrone.top/ 或 [email protected]
應用
- 將 ArduPilot 支援的外圍設備轉換為 DroneCAN 總線外圍設備(GNSS、指南針、氣壓計、空速傳感器、測距儀、接近傳感器、電子燃油噴射器)
- 基於 GPIO 的 DroneCAN 外圍設備,包括 PWM 和 LED 通知模組
- 示例外圍設備連接:測距儀、GPS & 指南針、空速傳感器、RC 輸入、I2C 電池監控
- 冗餘選項:將任一 CAN 總線連接到飛行控制器,或同時連接兩者
手冊
- 固件下載(ArduPilot AP_Periph):https://firmware.ardupilot.org/AP_Periph/
- MatekG474-外圍設備 (用於外圍傳感器)
- MatekG474-DShot (用於DroneCAN-PWM輸出)
- 更新方法
- DroneCAN GUI工具或任務規劃器 – DroneCAN標籤,載入“AP_Periph.bin”
- STM32CubeProgrammer DFU模式:將USB-TTL模塊連接到UART1,按住DFU按鈕的同時插入USB,載入“AP_Periph_with_bl.hex”
- 3D文件:CAN-G474_STEP.zip
- 教程:使用MatekL431適配器進行PWM和DShot
詳細信息
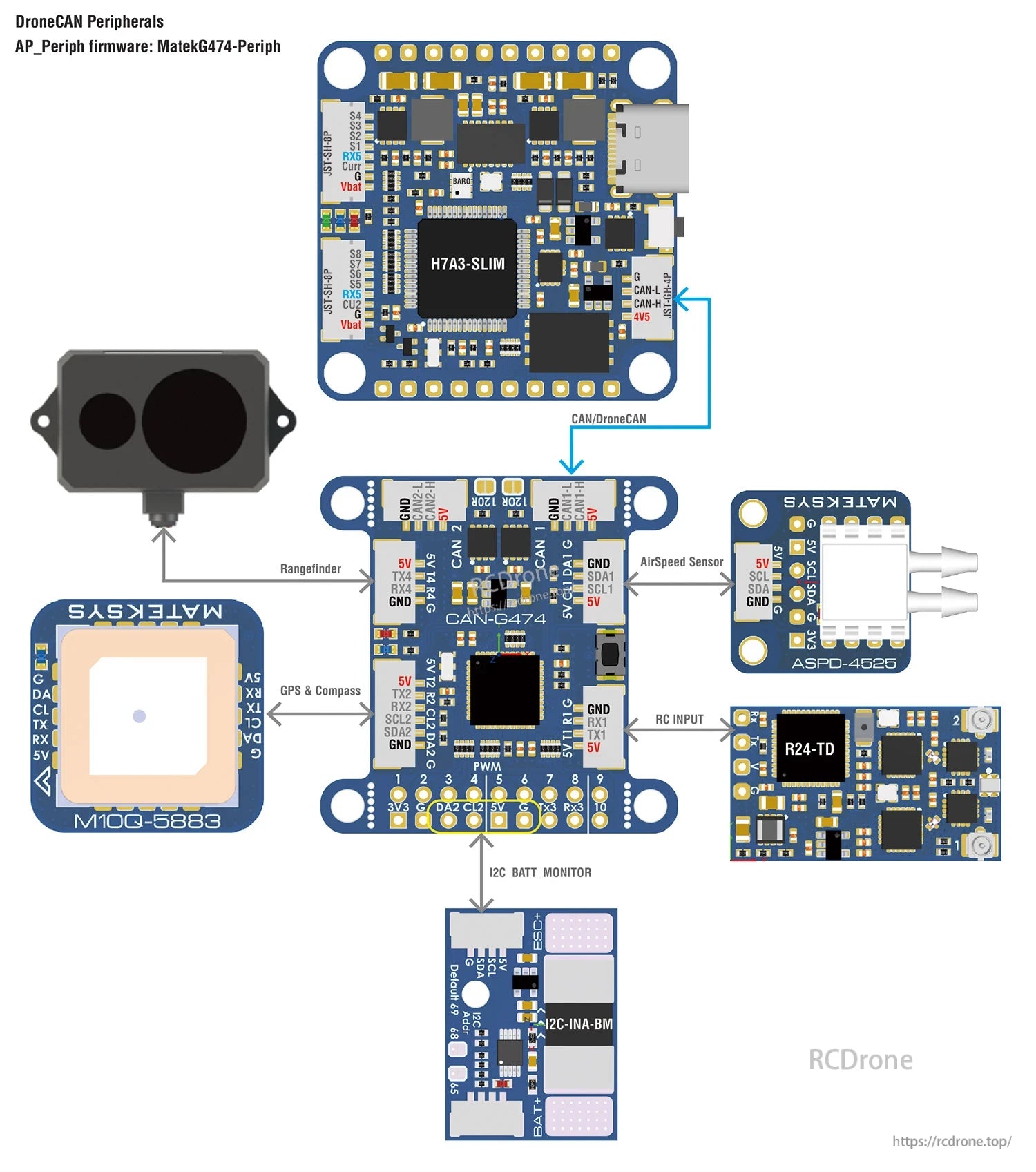
Matek CAN-G474板提供DroneCAN/CAN端口,並配有UART、I2C和PWM接頭,以連接常見的自動駕駛儀外圍設備。Matek CAN-G474 板連接到 CAN/DroneCAN 總線,並為伺服器或 ESC 提供多達 10 個 PWM 輸出。