MATEK M10-L4-3100 GPS 模組 - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEK M10-L4-3100 GPS 模組 - Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEKSYS
無法載入取貨服務供應情況
MATEK M10-L4-3100 - Mateksys AP_PERIPH GNSS 規格
使用:車輛與遙控玩具
建議年齡:12+y,14+y,6-12y
產地:中國大陸
材料:複合材料
品牌名稱:MATEKSYS
AP_PERIPH GNSS M10-L4-3100
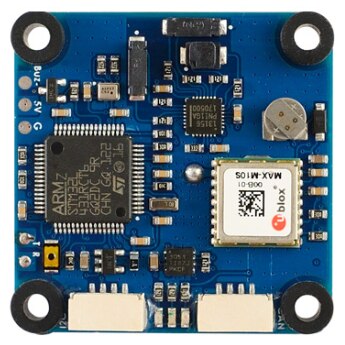
AP_Periph L431 CAN 節點、MAX-M10S、RM3100、SPL06-001、DroneCAN 協定與 UART_MSP
-
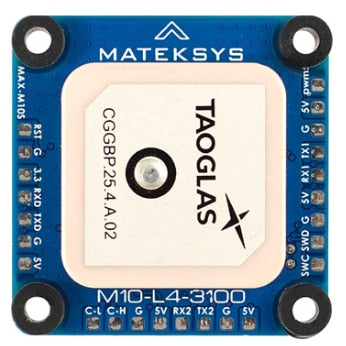
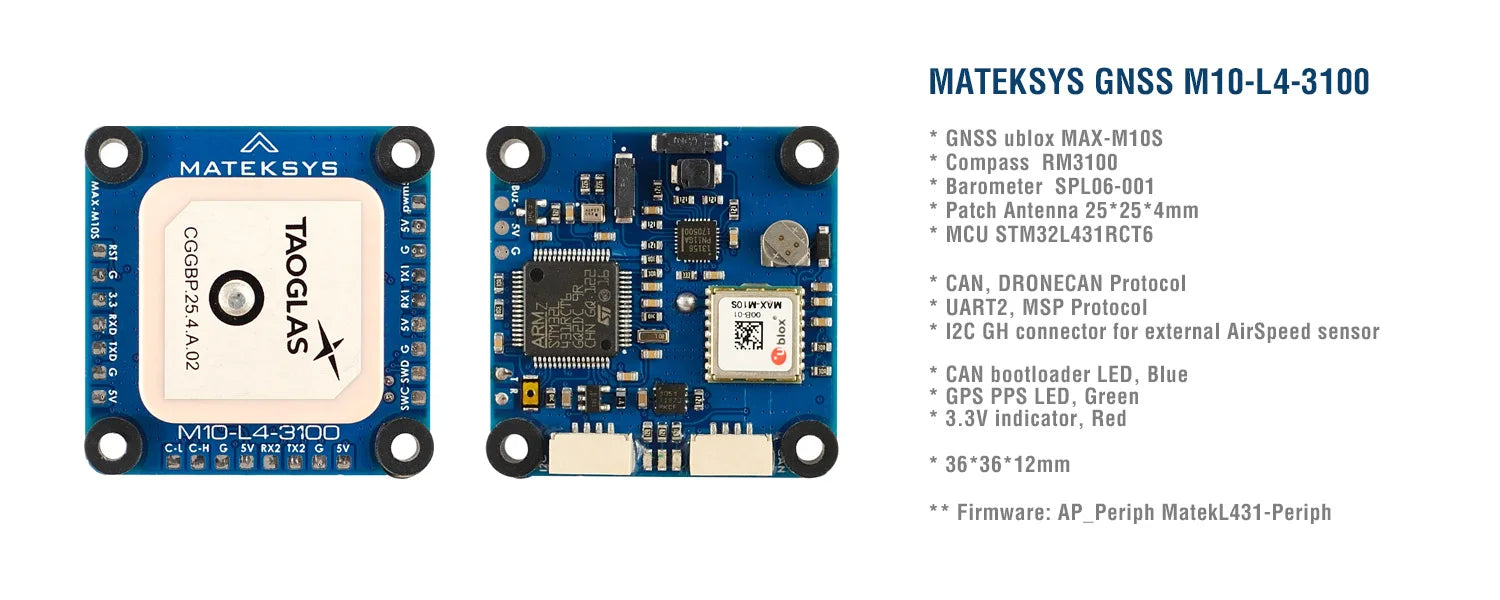
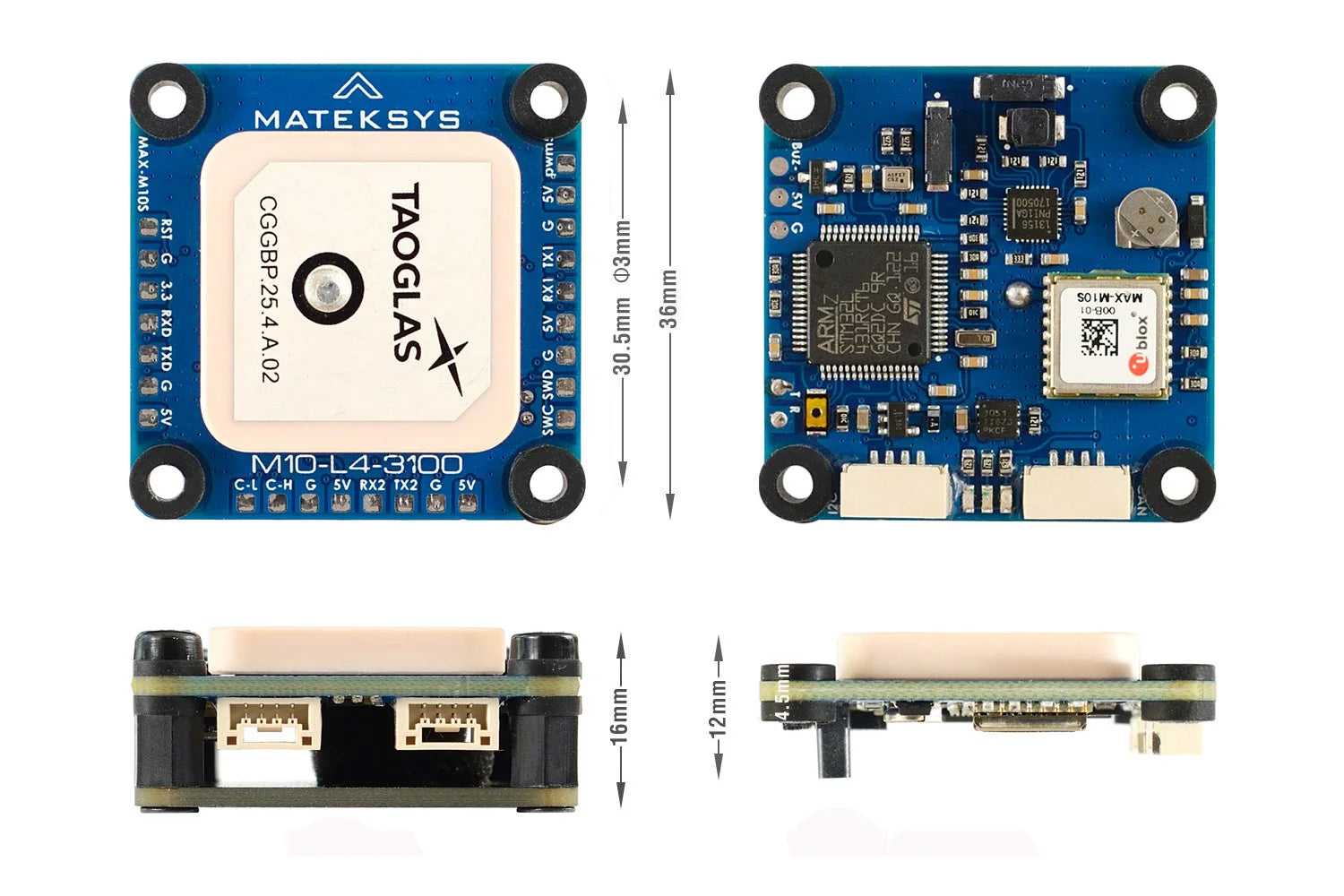
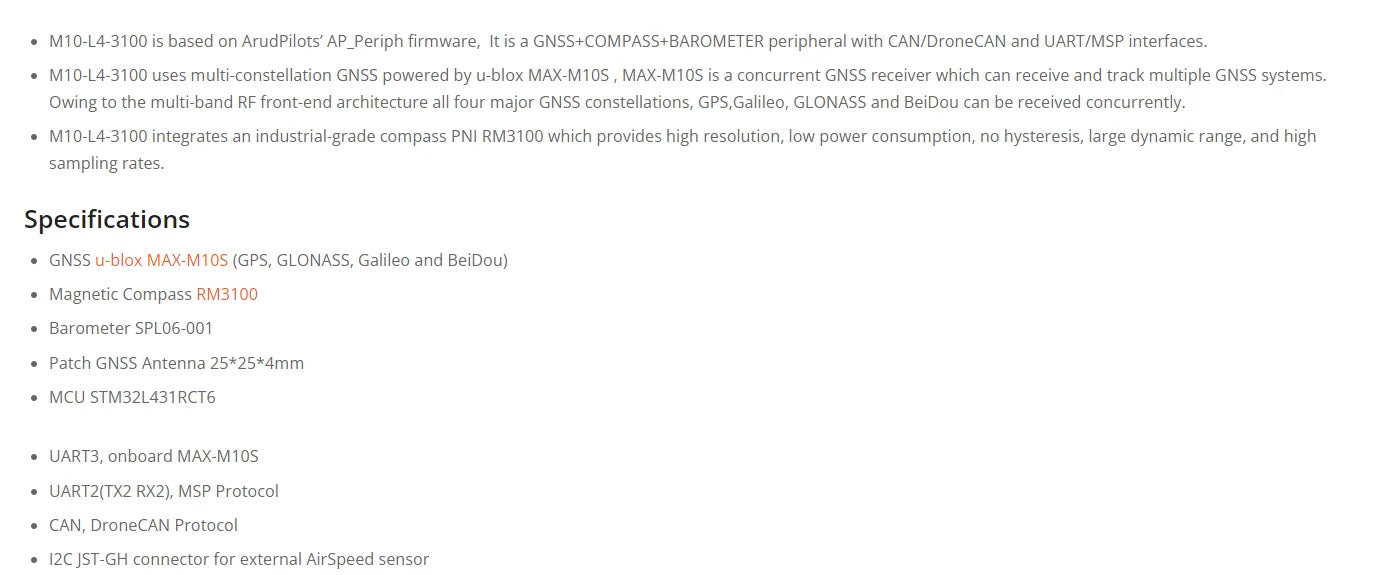
M10-L4-3100 基於 ArudPilots 的 AP_Periph 韌體,是一款 GNSS+COMPASS+BAROMETER 週邊設備,具有 CAN/DroneCAN 和 UART/MSP 介面。
-
M10-L4-3100 使用由 u-blox MAX-M10S 提供支援的多星座 GNSS,MAX-M10S 是一款並發 GNSS 接收器,可接收和追蹤多個 GNSS 系統。由於採用多頻段射頻前端架構,可以同時接收所有四個主要 GNSS 星座:GPS、Galileo、GLONASS 和北斗。
-
M10-L4-3100 整合工業級指南針 PNI RM3100,具有高解析度、低功耗、無遲滯、大動態範圍和高取樣率。

有 ublox FWS 的 MAX-M1OS 上的預設設定。是在啟用 QZSS 和 SBAS 的情況下同時接收 GPS、Galileo 和 BeiDou BI。 GLONASS 預設關閉北斗 B1I (1575.42 MHz),且不能同時開啟。
CAN(UAVCAN協定)連線
-
M10-L4-3100 5V — FC 4.5V ~ 5。3V
-
M10-L4-3100 CAN-H — FC CAN 高
-
M10-L4-3100 CAN-L — FC CAN 低
-
M10-L4-3100 G — FC G/GND
FC UAVCAN 參數(ArduPilot)
-
CAN_D1_PROTOCOL -> 1
-
CAN_P1_DRIVER -> 1
-
GPS_TYPE -> 9 (DroneCAN)
-
COMPASS_TYPEMASK -> 0(確保 DroneCAN 未選取)
——————————————————————–
如果將 I2C 空速感知器連接到 M10-L4-3100 的 I2C 連接埠
-
ARSPD_TYPE -> 8 (UAVCAN)
-
ARSPD_USE -> 1
且必須為連接到 M10-L4-3100 I2C 連接埠的空速感知器設定 CAN 節點參數
任務規劃器 > 初始設定 > 選用硬體 > UAVCAN > SLCan 模式 CAN1 > 參數
-
MS4525 ARSP_TYPE -> 1(hwdef 中的預設值)
-
MS5525 ARSP_TYPE -> 3 僅支援位址為 0x77 的 MS5525
-
SDP3X ARSP_TYPE -> 6
-
DLVR-L10D ARSP_TYPE -> 9
-
寫入並重新啟動
————————————————————————–
如果將 2812LED DIN 連接到 PWM5 焊盤
-
NTF_LED_TYPES -> (確保選取 DroneCAN)
SLCan 模式 CAN1 > 參數
-
OUT5_FUNCTION 120
-
NTF_LED_TYPES 455
-
AP_Periph fw 必須為“MatekL431-Periph”,“MatekL431-GPS”中禁用 MSP 功能
UART(MSP 協定)連線
-
M10-L4-3100 5V — FC 4.0V ~ 5.3V
-
M10-L4-3100 TX2 — FC 備用 UART_RX
-
M10-L4-3100 RX2 — FC 備用 UART_TX(非必需)
-
M10-L4-3100 G — FC G/GND
ArduPilot(自 4.1.x 起)FC 參數
-
Serialx_PROTOCOL = 32 (MSP),其中 x 是用於自動駕駛儀連接的序列埠。
-
Serialx_BAUD = 115 其中 x 是用於自動駕駛儀連接的序列埠。
-
GPS 型態 = 19 (MSP)
-
BARO_PROBE_EXT = 4096(MSP Baro)
-
BARO_PRIMARY = 1(如果您想要使用 MSP baro 作為主氣壓,否則保留預設值)
-
COMPASS_TYPEMASK 0 (或確保未檢查 MSP 位元)
INAV(自 2.6 起)FC 參數
-
M10-L4-3100 透過備用 UART 與 INAV 支援的任何飛行控制器相容。
-
在連接埠標籤中,在 M10-L4-3100 連線的對應 UART 上啟用 MSP,請勿在該 UART 上啟用「GPS」。選擇 波特率115200。
-
具有 GPS
-
設定 gps_provider = MSP
-
設定 mag_hardware = MSP
-
設定 baro_hardware = MSP
-
設定align_mag = CW90,如果羅盤安裝平整且箭頭朝前,且飛行控制器箭頭也朝前。