MATEK F405-WTE - Mateksys 飛行控制器
MATEK F405-WTE - Mateksys 飛行控制器
MATEKSYS
無法載入取貨服務供應情況
MATEK F405-WTE - Mateksys 飛行控制器規格
使用:車輛與遙控玩具
建議年齡:12+y,14+y
產地:中國大陸
材料:複合材料
品牌名稱:MATEKSYS
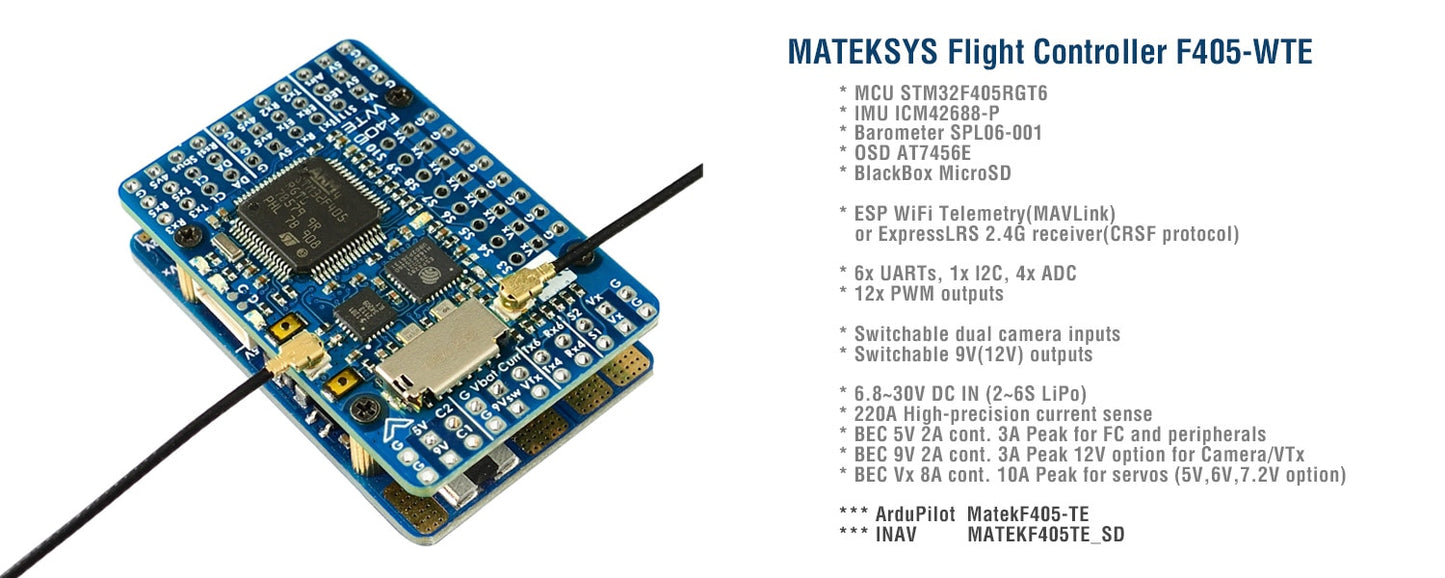
飛行控制器 F405-WTE
STM32F405RGT6、ICM42688P、SPL06、OSD、ESP WIFI 遙測/ELRS 2.4G 接收器、6xUART、12x PWM、1xI2C
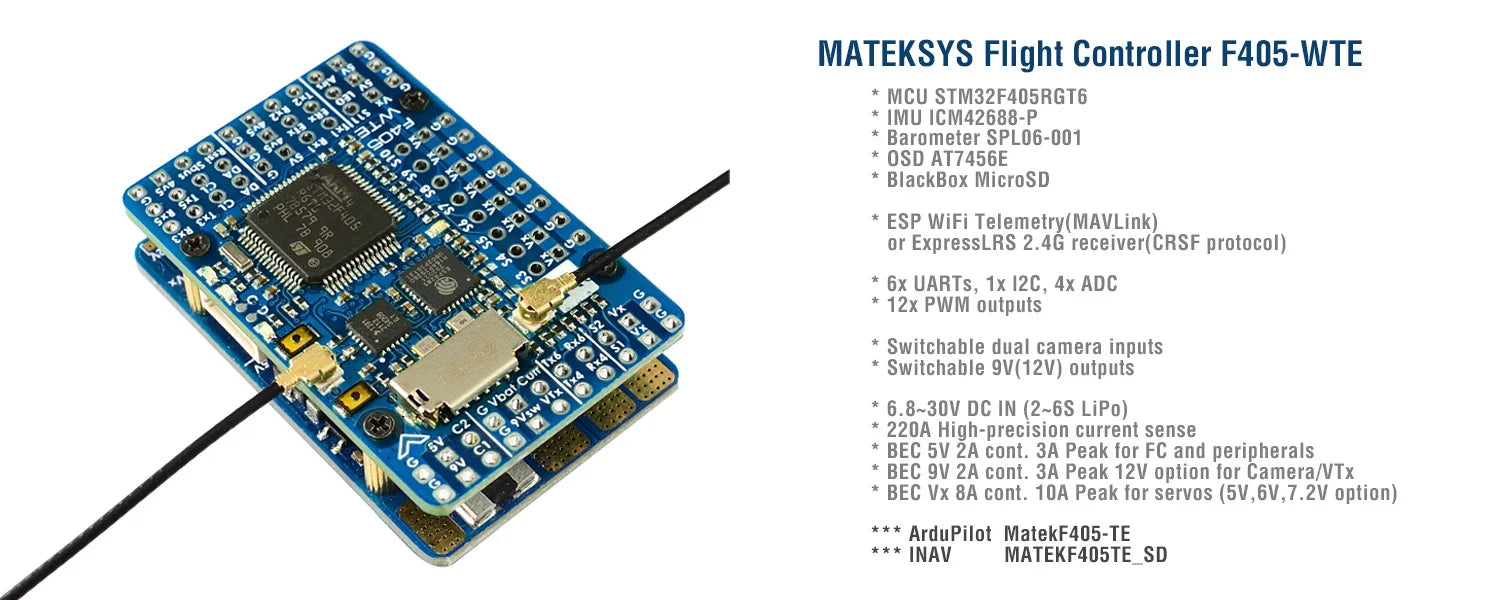
MATEKSYS 飛控F4O5-WTE MCU STM3ZFAOSRGT6 IMU ICM42688-P 氣壓計SPLO6-001 OSD AT7456E BlackBox MicroSD 2 8 2 2 2 ESP WiFi 遙測(MAVLink) 2.ExSD 2 8 2 2 2 ESP WiFi 遙測(MAVLink) 2.ExpLR I2C , 4x ADC 85 12x PWM 輸出 可切換雙相機輸入 4+

FC 規格
-
MCU:STM32F405RGT6,168MHz,1MB 快閃記憶體
-
IMU:ICM42688-P
-
巴羅:SPL06-001
-
OSD:AT7456E
-
Blackbox:MicroSD 卡插槽
-
ESP WiFi 遙測(MAVLink,14dBm)
-
ExpressLRS 2.4G 接收器(CRSF 協議,遙測 12dBm)
-
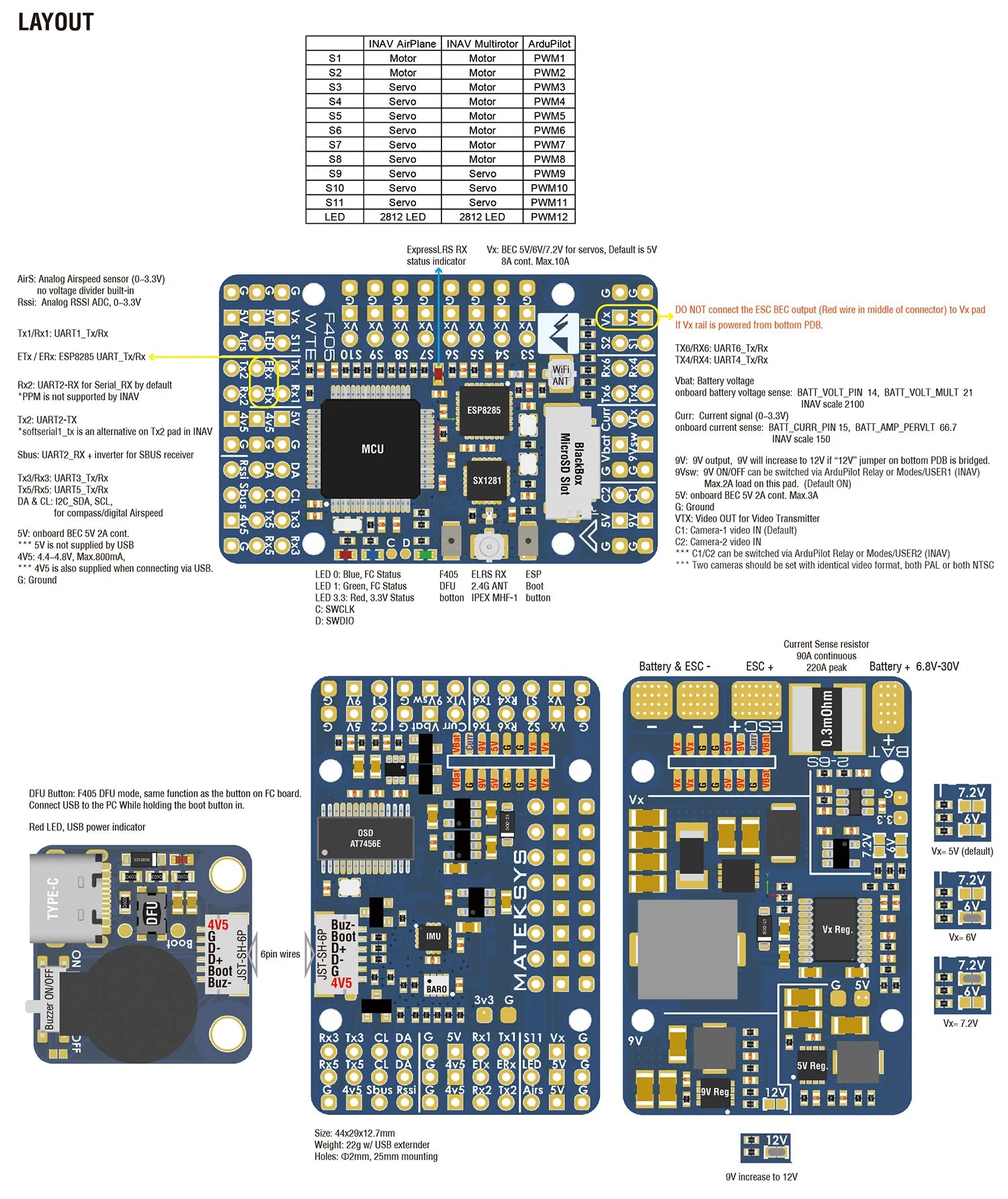
6x UART、1x Softserial_Tx 選項 (INAV)
-
12x PWM 輸出
-
1x I2C
-
4x ADC(VBAT、電流、RSSI、空速)
-
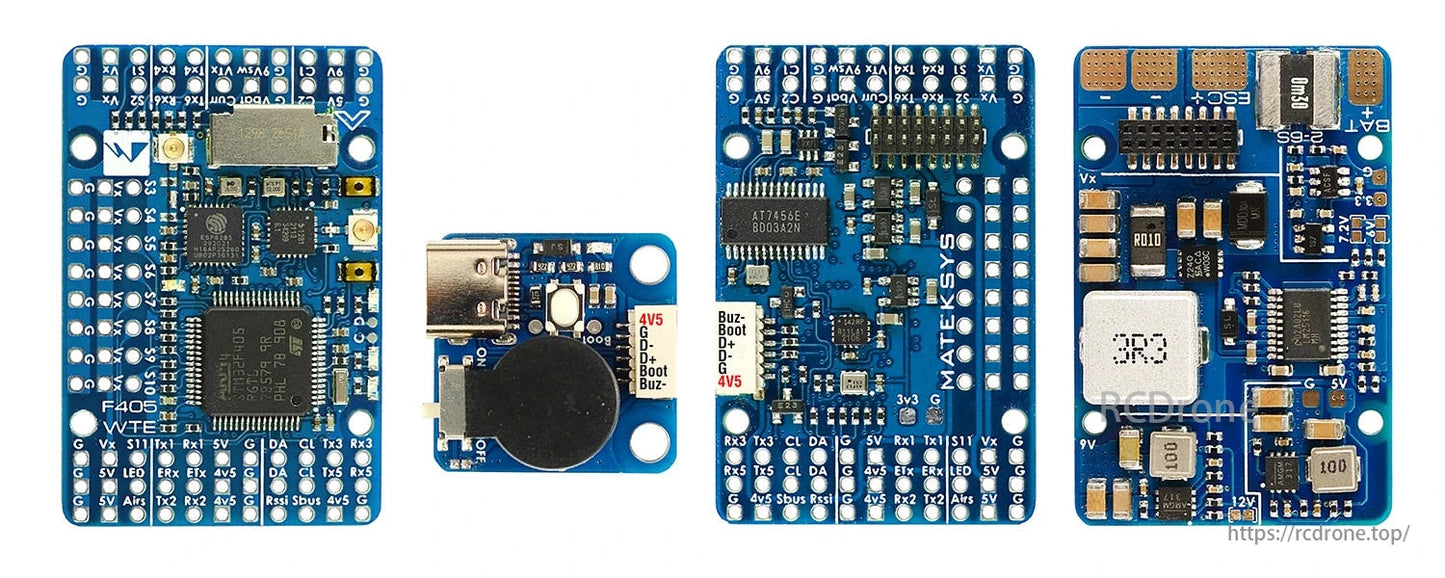
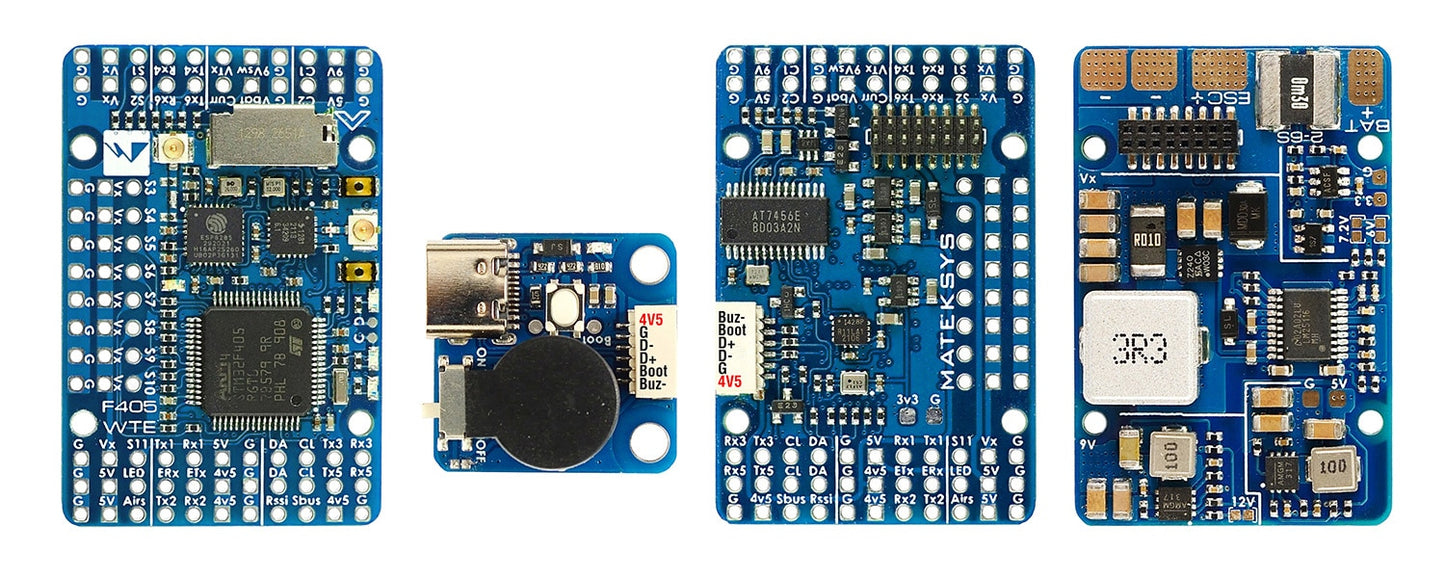
USB/蜂鳴延長器,附 Type-C(USB2.0)
-
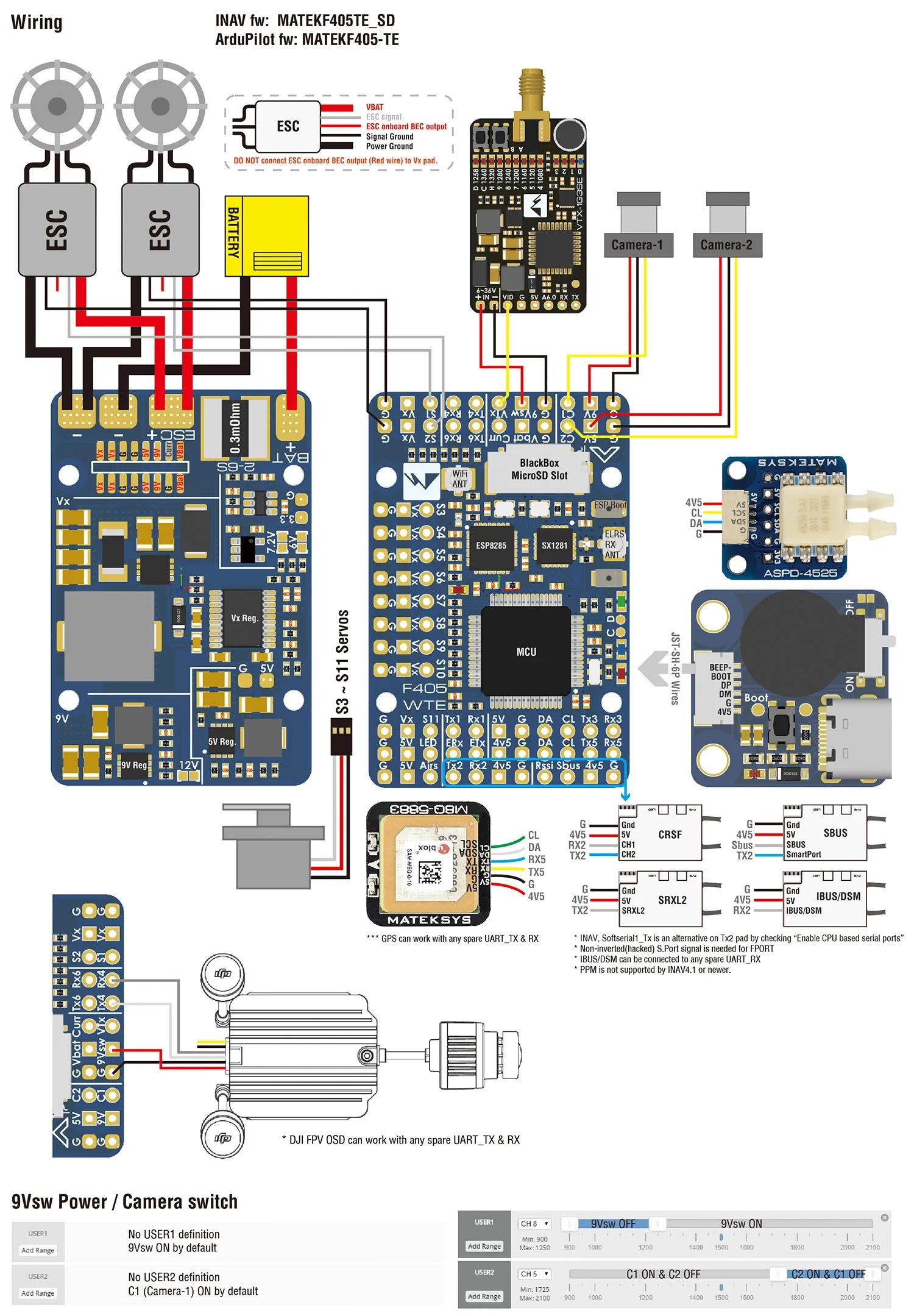
雙鏡頭輸入開關
-
VTX 電源開關為 9V(12V)
FC 韌體
-
ArduPilot:MatekF405-TE
-
INAV:MATEKF405TE_SD(在 INAV 配置器 4.x 中不可用)
PDB
-
輸入電壓範圍:6.8~30V (2~6S LiPo)
-
1x ESC 電源墊
-
電池分壓器 1K:20K(INAV 中的標度 2100,ArduPilot 中的 BATT_VOLT_MULT 21.0)
-
電流感測器:220A、3.3V ADC(INAV 中的刻度為 150,ArduPilot 中的刻度為 66.7 A/V)
-
偵測電阻:90A 連續電流,220A 峰值
BEC 5V 輸出
-
專為飛控、接收器、OSD、攝影機、蜂鳴器、2812 LED_Strip、蜂鳴器、GPS模組、AirSpeed設計
-
連續電流:2 安培,最大 3A
BEC 9V /12V 輸出
-
專為視訊傳輸器、相機、雲台等設計
-
連續電流:2 安培,最大 3A
-
有跳線墊的 12V 選項
-
為了穩定的9V/12V輸出,輸入電壓應>輸出電壓+1V
BEC Vx 輸出
-
專為伺服系統設計
-
電壓可調,預設 5V,透過跳線設定 6V 或 7.2V
-
連續電流:8 安培,最大 10A
-
為了穩定 Vx 輸出,輸入電壓應 > Vx 電壓 +1V
BEC 3.3V 輸出
-
專為Baro / Compass模組和外部3.設計。3V 週邊
-
線性調節器
-
連續電流:200mA
物理
-
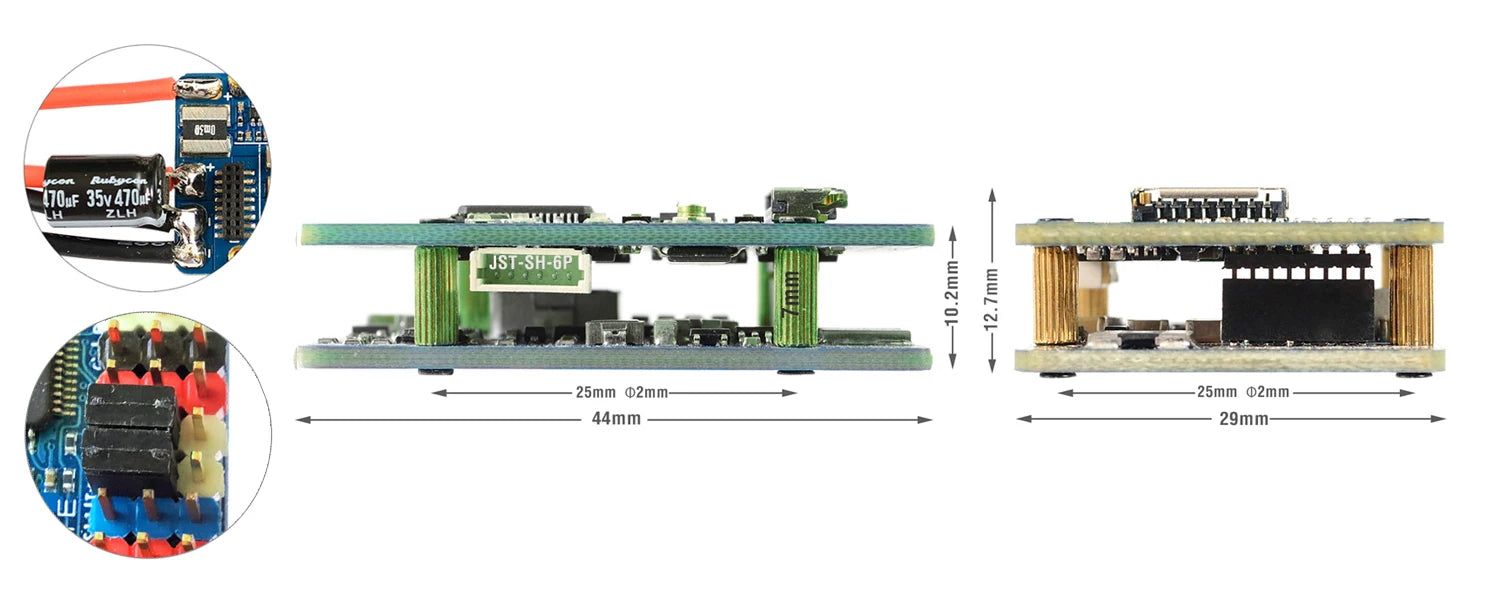
安裝:25 x 25mm,Φ2mm
-
尺寸:44 x 29 x 12.7mm
-
重量:22 克,附 USB/蜂鳴器轉接器
包含
-
1x F405-WTE
-
1x USB(Type-C)/Beep(被動蜂鳴器)延長器 + 用於 USB 延長器的 20cm JST-SH-6P 至 JST-SH-6P 電纜。
-
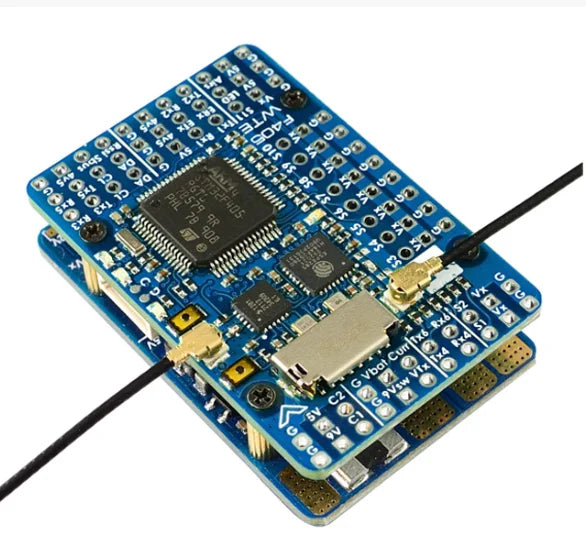
2x IPEX-MHF1 2.4G 天線
-
1x Rubycon ZLH 35V 470uF 電容器
-
杜邦 2.54 腳 (板出貨時未焊接)
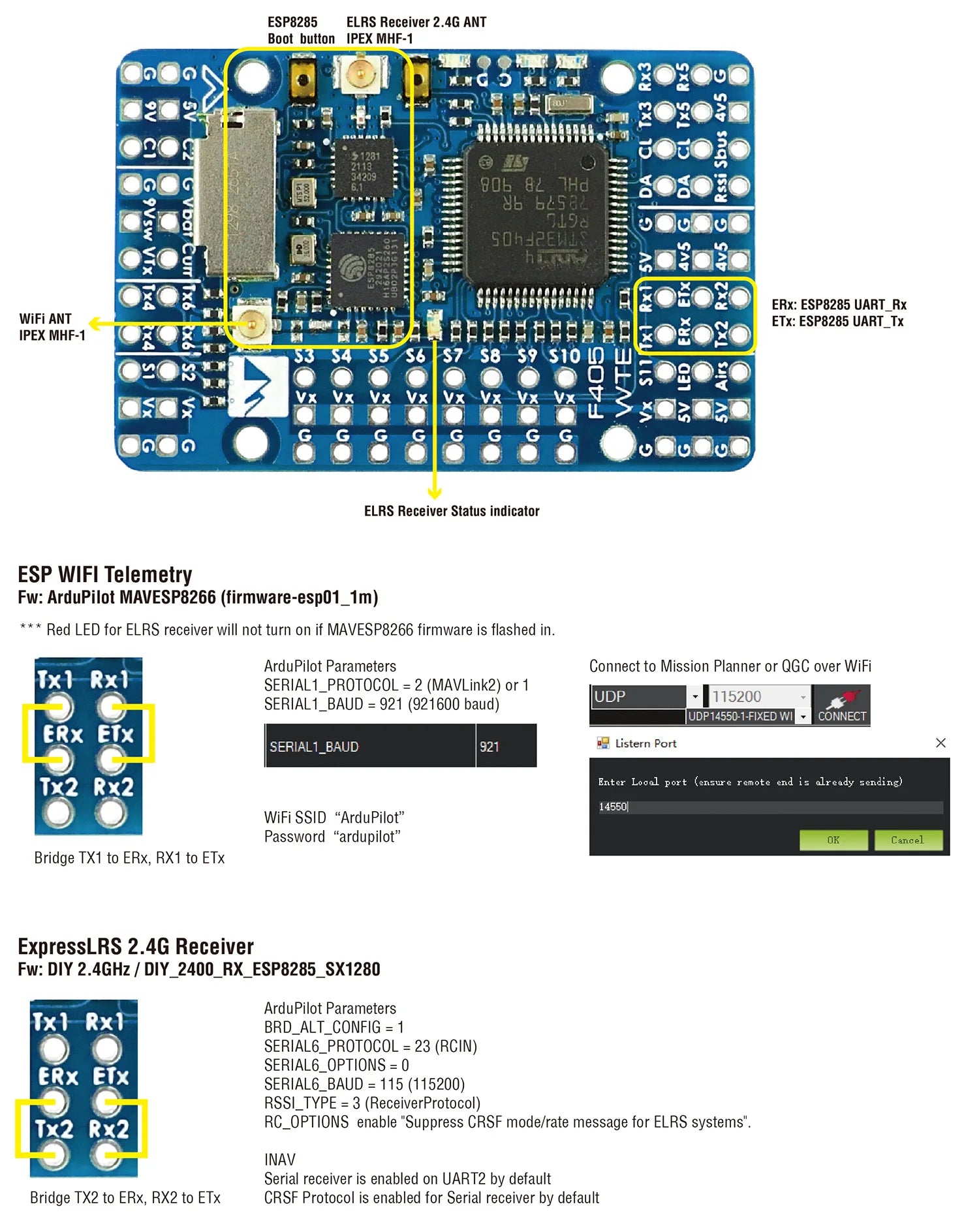
ArduPilot ESP8266 wifi 遙測
-
https://ardupilot.org/copter/docs/common-esp8266-telemetry.html
-
使用 ESP_NodeMCU-PyFlasher 進行燒寫
-
將 ESP8285(ETx、ERx)連接到 USB-TTL 轉接器,其中 F405-WTE 上的 ETx 連接到 USB-TTL 上的 Rx,ERx 連接到 USB-TTL 上的 Tx。將 F405-WTE 的 4v5 和 GND 連接至 USB-TTL
的 5V 和 GND -
按住 ESP8285 啟動按鈕的同時將 USB-TTL 轉接器連接到 PC。
-
開啟 ESP_NodeMCU-PyFlasher
-
選擇USB-TTL模組的串列埠,載入韌體,選擇「雙輸出(DOUT)
-
點選「Flash NodeMCU「
-
閃爍後,關閉電源,然後透過 USB 或電池開啟 F405-WTE。
-
等待幾秒鐘,搜尋 WiFi SSID“ArduPilot”,密碼為“ardupilot”
-
提示:如果刷入 MAVESP8266 韌體,ELRS 接收器的紅色 LED 將不會亮起。
-
ExpressLRS 2.4G 接收器
-
ExpressLRS AUX1-AUX8 不是全解析度頻道。
-
透過 WiFi 閃爍
-
透過 USB 為 F405-WTE 供電,接收器的 LED(紅色)會先慢速閃爍,30 秒後,它會快速閃爍,表示處於 WiFi 熱點模式。
-
更詳細的步驟,請參閱此頁。
-
目標: DIY 2.4GHz / DIY_2400_RX_ESP8285_SX1280
-
-
透過 UART 刷新
-
將 ESP8285(ETx、ERx)連接到 USB-TTL 轉接器,其中 F405-WTE 上的 ETx 連接到 USB-TTL 上的 Rx,ERx 連接到 USB-TTL 上的 Tx。將 F405-WTE 的 4v5 和 GND 連接到 USB-TTL 的 5V 和 GND。
-
按住 ESP8285 啟動按鈕的同時將 USB-TTL 轉接器連接到 PC。
-
選擇目標 DIY 2.4GHz / RXY21838420742< 025> 和 “UART」對於刷新方法,設定綁定短語和韌體選項,完成後,點擊建置和刷新。
-
透過 WiFi 與 INAV 配置器進行 UDP 連線
-
韌體: MSPWifiBridge_ESP-01.bin 基於 github.com/Scavanger/MSPWifiBridge
編譯 -
使用 ESP_NodeMCU-PyFlasher 燒寫
-
將 ESP8285(ETx、ERx)連接到 USB-TTL 轉接器,其中 F405-WTE 上的 ETx 連接到 USB-TTL 上的 Rx,ERx 連接到 USB-TTL 上的 Tx。將 F405-WTE 的 4v5 和 GND 連接至 USB-TTL
的 5V 和 GND -
按住 ESP8285 啟動按鈕的同時將 USB-TTL 轉接器連接到 PC。
-
開啟 ESP_NodeMCU-PyFlasher
-
選擇USB-TTL模組的串列埠,載入韌體,選擇「雙輸出(DOUT)
是。 -
點選「快閃記憶體 NodeMCU「
-
閃爍後,關閉電源,然後透過 USB 或電池開啟 F405-WTE。
-
等待幾秒鐘,搜尋 WiFi SSID“MSPWifiBridge”,密碼為「123456789123456789
-
如果沒有自動轉送至設定頁面,請手動前往http://192.168.4.1。標準登入資料:使用者名稱: admin,密碼:
35>
-
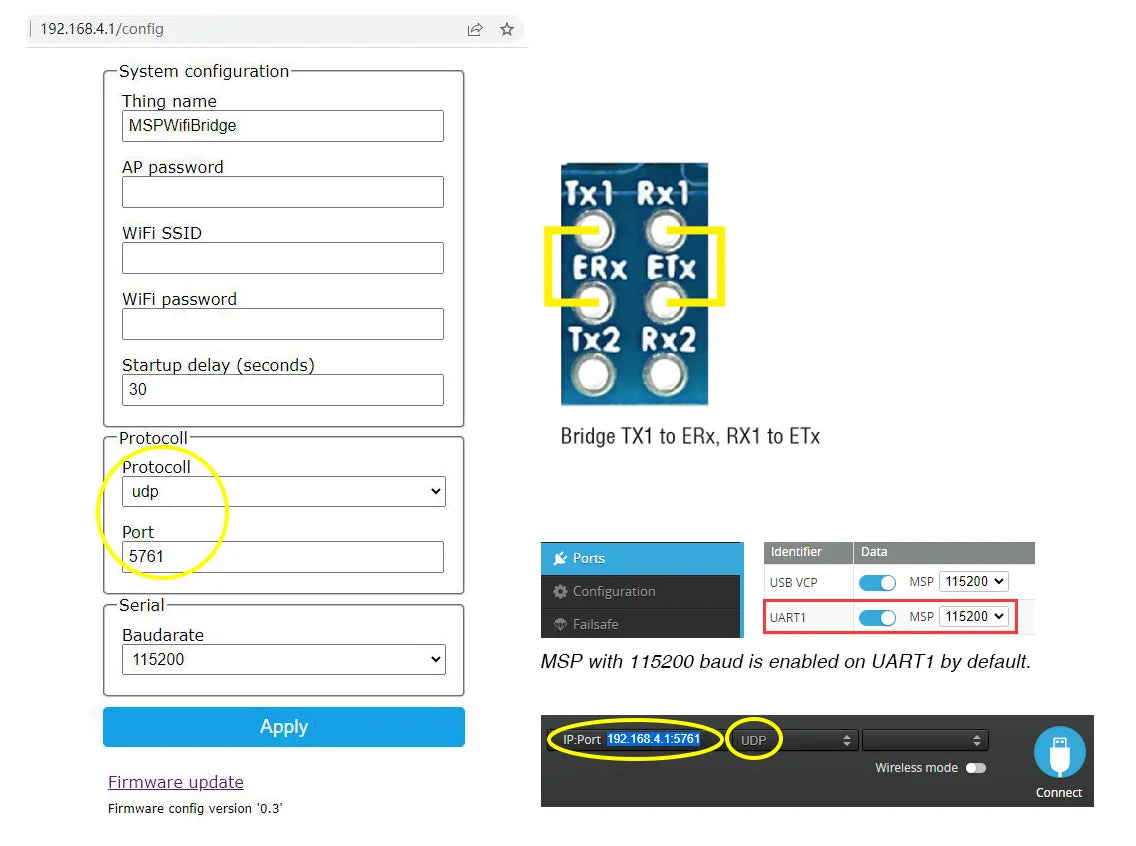
192.168.4.1/config 系統設定 Thing_name MSPWifiBridge AP 密碼 Ixl Rx| WiFi SSID ERx ETx WiFi 密碼 Tx2 Rx2 Staz 延遲(秒 30 協定橋接 TX1 到 erx,RXI 到 ETx 協定 udp 連接埠 5761 連接埠識別碼資料 USB VC?
Related Collections