MATEK H743-MINI V3 - Mateksys 飛行控制器
MATEK H743-MINI V3 - Mateksys 飛行控制器
MATEKSYS
無法載入取貨服務供應情況
MATEK H743-MINI V3 - Mateksys 飛行控制器規格
使用:車輛與遙控玩具
建議年齡:12+y,14+y,3-6y,6-12y,0-3y
產地:中國大陸
材料:複合材料
品牌名稱:MATEKSYS
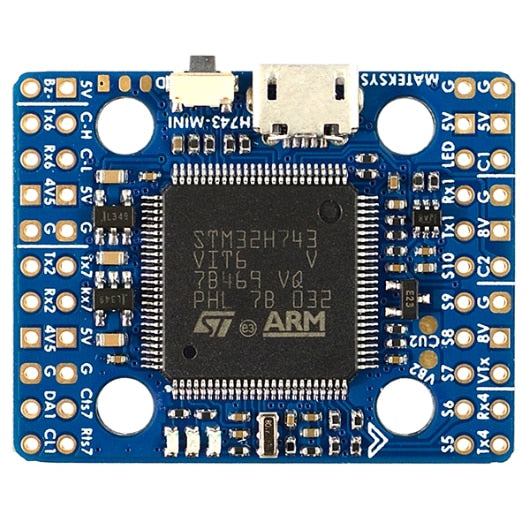
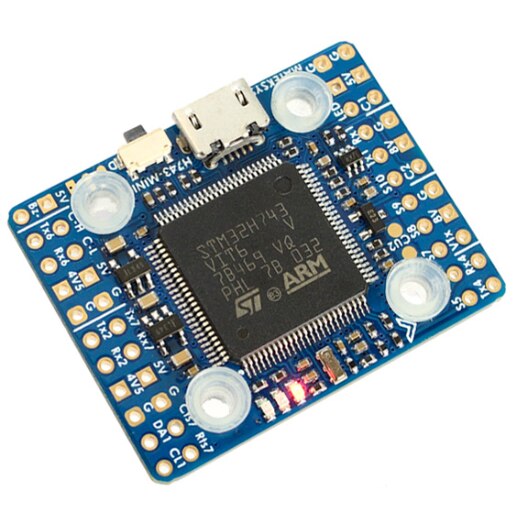
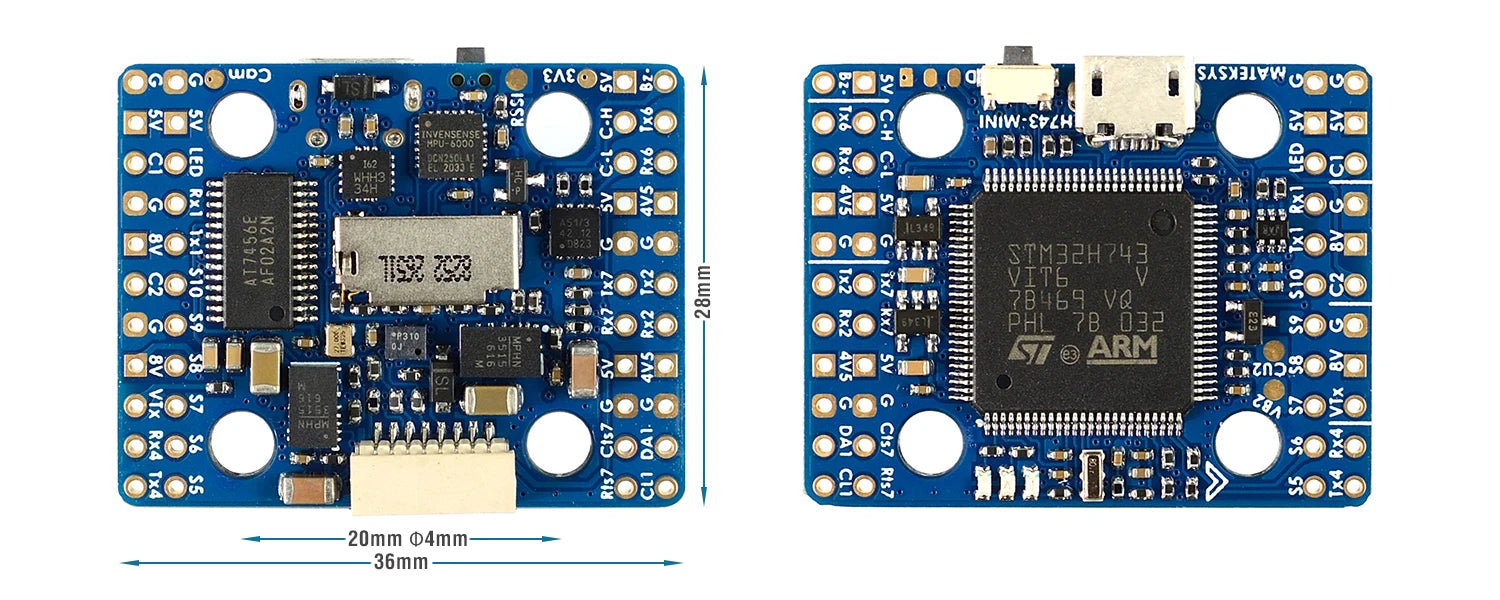
飛行控制器 H743-MINI
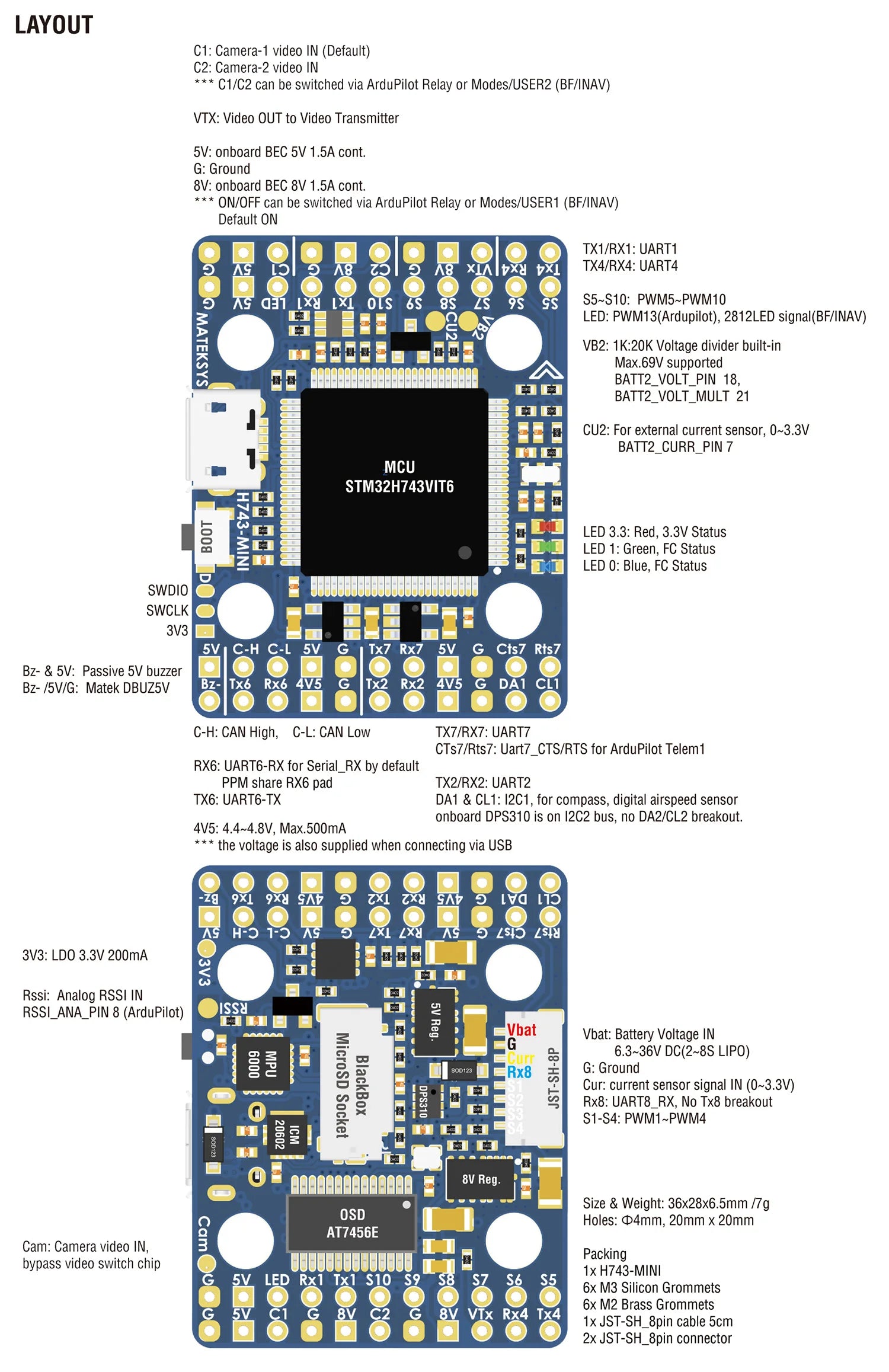
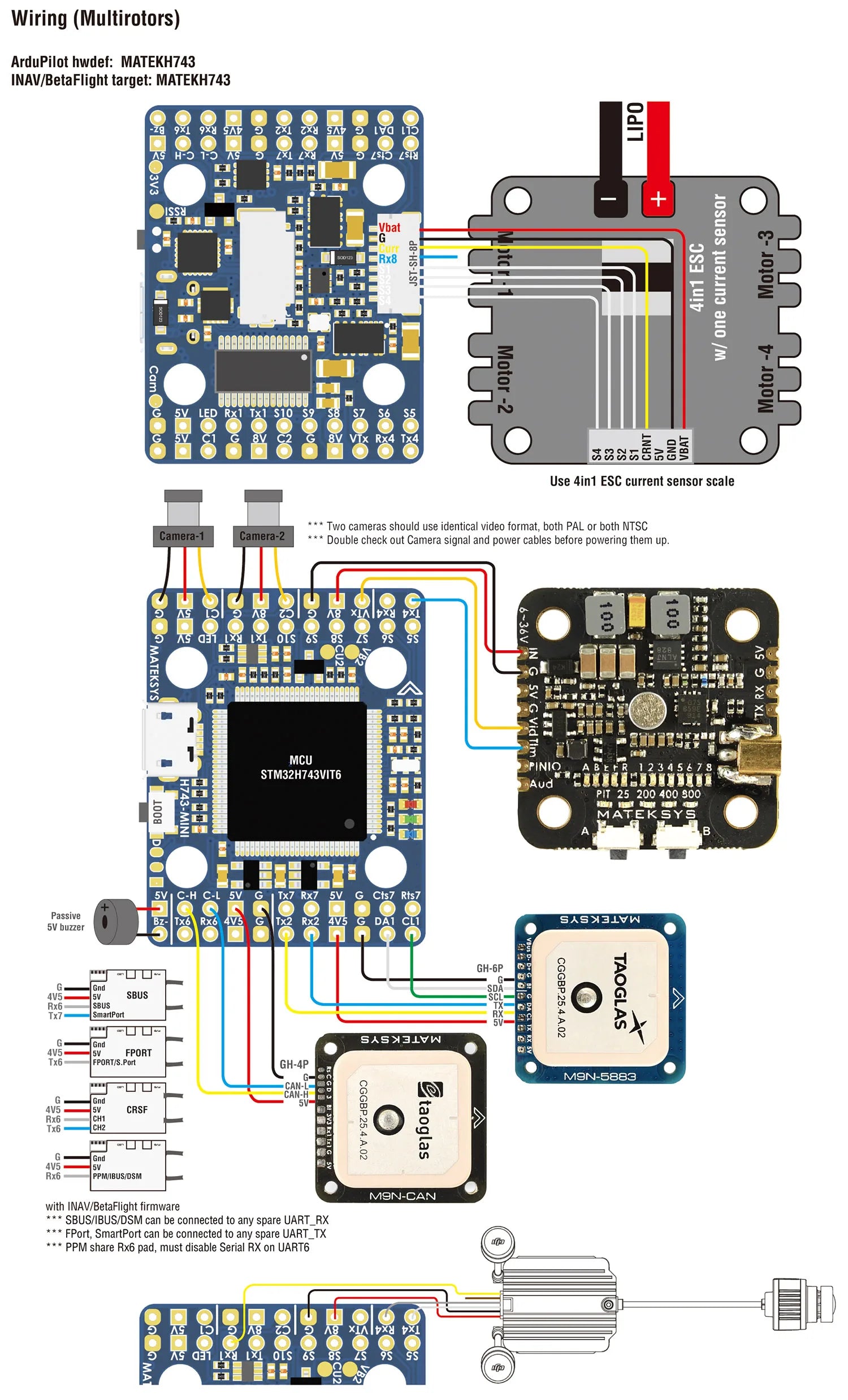
STM32H743VIT6、ICM20602 和 MPU6000、DPS310、OSD、5.5 個 UART、2 個 I2C、1 個 CAN、11 個 PWM 輸出、BEC5V、BEC8V
FC 規格
-
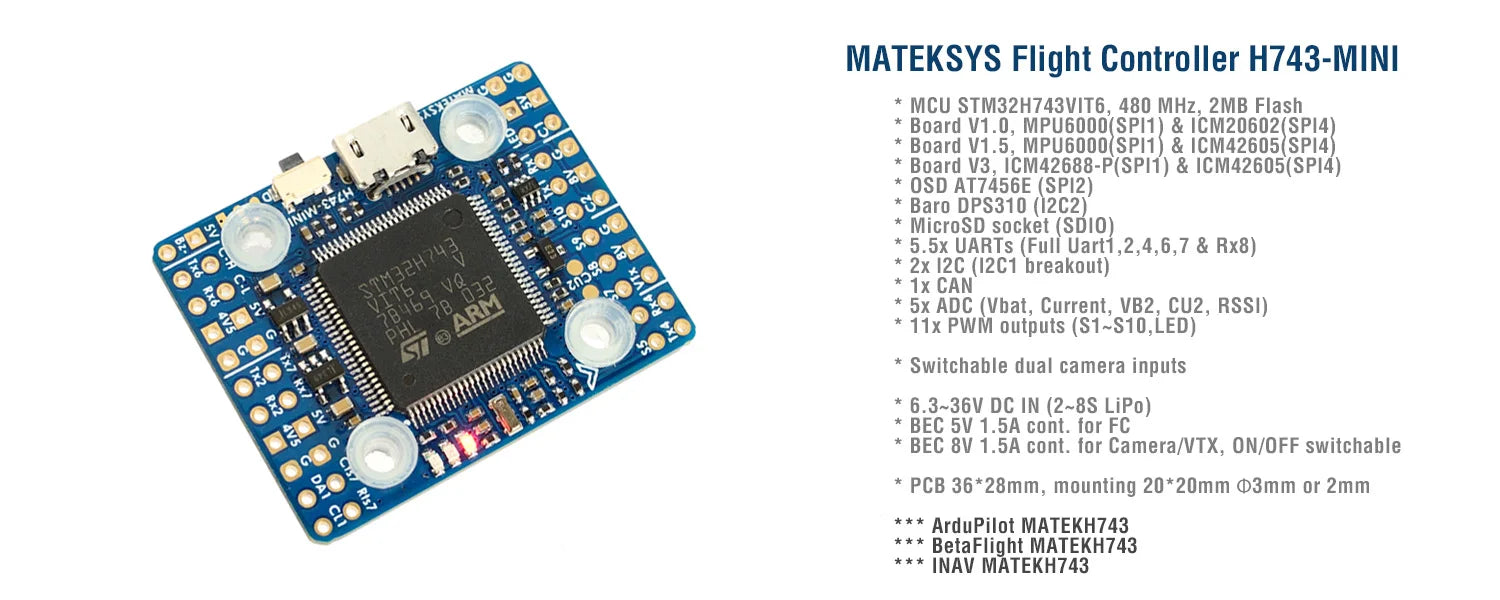
MCU:STM32H743VIT6,480MHz,1MB RAM,2MB 快閃記憶體
-
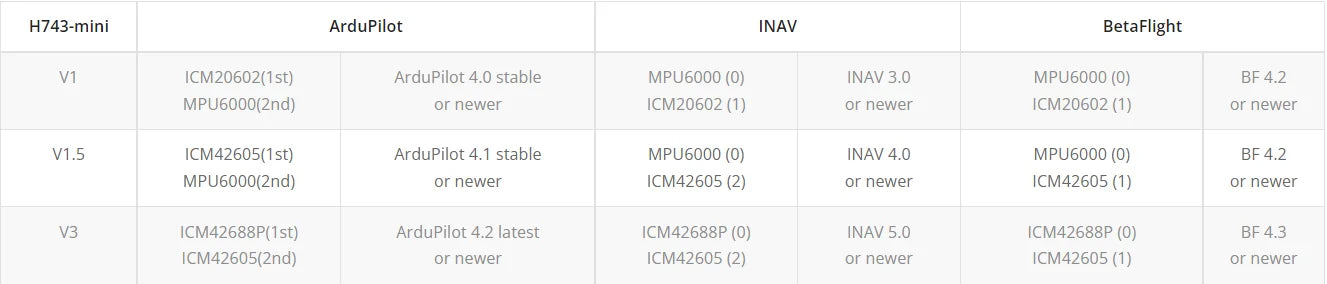
板 V1.0 IMU:MPU6000 (SPI1) 與 ICM20602 (SPI4)
-
板 V1.5 IMU:MPU6000 (SPI1) 與 ICM42605 (SPI4)
-
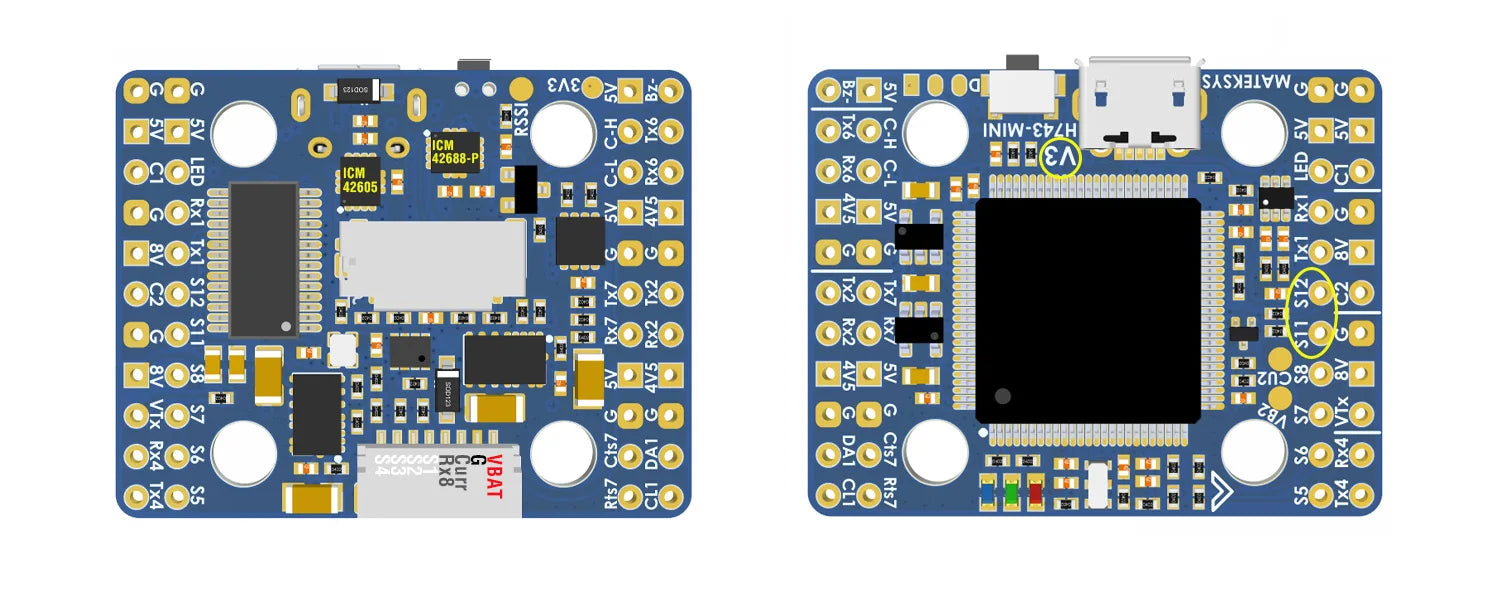
板 V3 IMU:ICM42688-P (SPI1) 與 ICM42605 (SPI4)
-
Baro:英飛凌 DPS310 (I2C2)
-
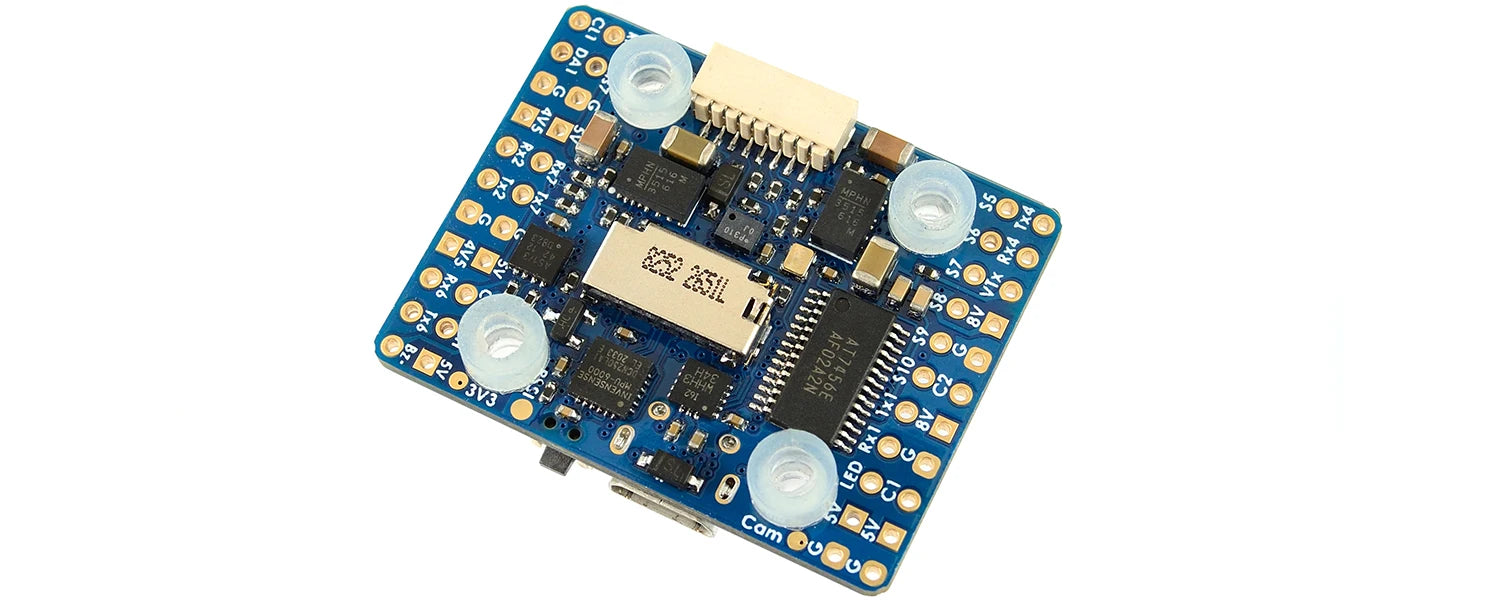
OSD:AT7456E (SPI2)
-
Blackbox:MicroSD 卡插槽 (SDIO)
-
5.5x Uart(1,2,4,6,7,Rx8)
-
11x PWM 輸出
-
2x I2C(I2C1/DA1 CL1 焊盤,無 I2C2 分線)
-
1x CAN(C-H、C-L 焊盤)
-
5x ADC(VBAT、電流、RSSI、VB2、CU2)
-
3 個 FC 狀態 LED(藍色、紅色)和 3.3V 指示燈(紅色)
-
1x JST-SH1.0_8pin 連接器(Vbat/G/Curr/Rx8/S1/S2/S3/S4)
-
雙鏡頭輸入開關
-
8V 電源 ON/OFF 開關
電源
-
Vbat 輸入:6.3~36V(2~8S LiPo)
-
BEC:5V 1.5A(續) (最大2A)
-
BEC:8V 1.5A(續) (Max.2A), 當Vbat>=10V時8V輸出穩定,當Vbat< 10V時8V輸出Vbat的80%
-
LDO 3.3V:200mA
-
VB2 pad 支援最大。 69V(分壓器1K:20K)
-
靜態功率:200mA@5V with Betaflight,150mA@5V with ArduPilot
FC 韌體
-
ArduPilot(ChiBiOS):MATEKH743
-
BetaFlight:MATEKH743
-
INAV:MATEKH743
物理
-
安裝
-
20 x 20mm/Φ3mm,含矽膠墊圈
-
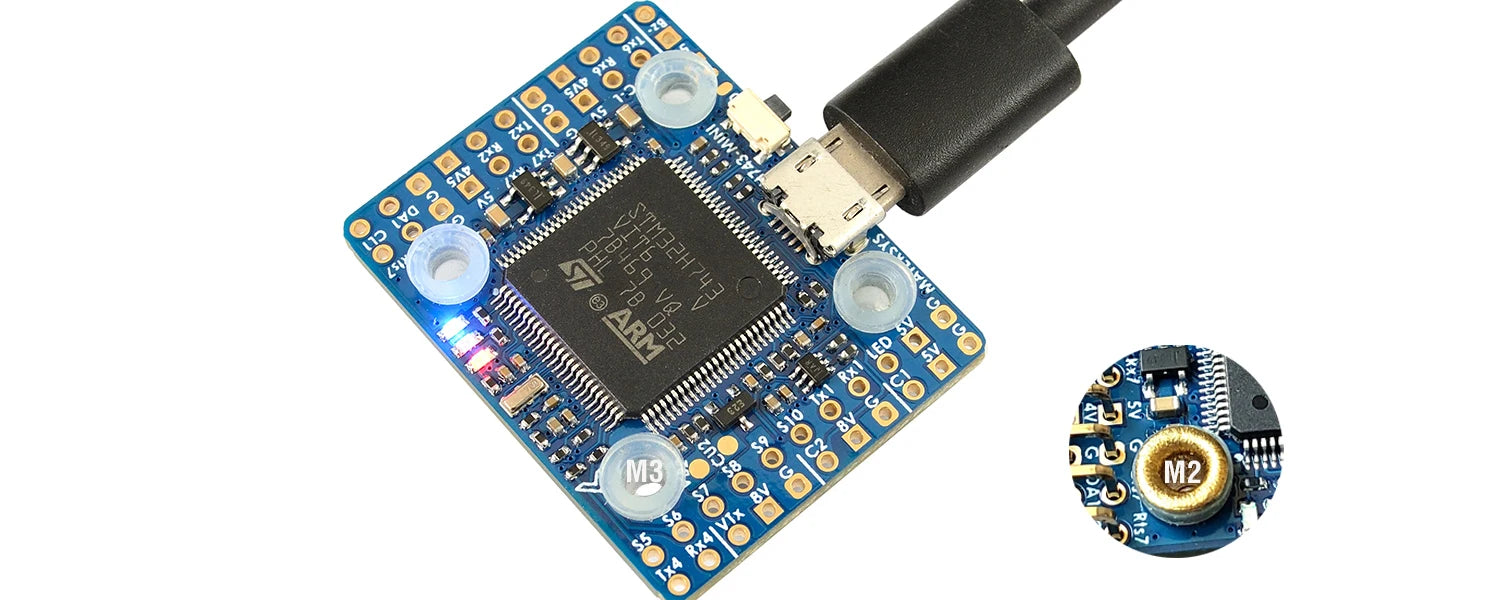
20 x 20mm/Φ2mm,帶矽和黃銅索環
-
-
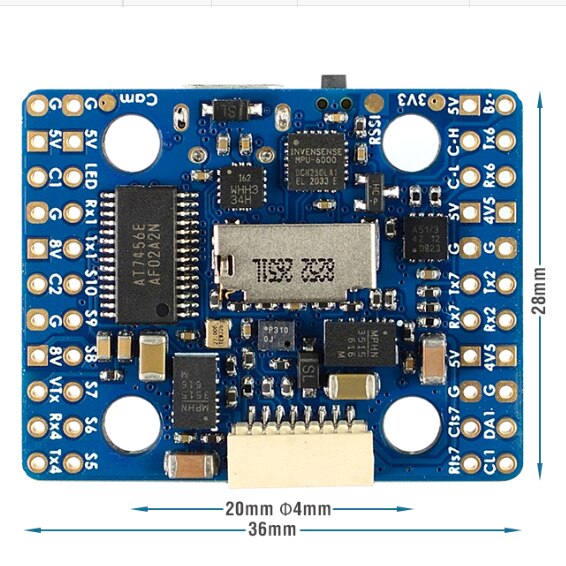
尺寸:36 x 28 x 6.5mm
-
重量:7g
包括
-
1x H743-MINI
-
6x 矽墊圈 M4 至 M3
-
6x 黃銅索環 M3 至 M2
-
1x JST-SH1.0_8pin 電纜,5cm
-
2x JST-SH1.0_8pin 連接器
H743-mini V3 的新增功能
-
ICM42688-P+ICM42605 代替 MPU6000+ICM42605
-
PWM 10 和 11 代替 PWM9 和 10(V1/V1.5)
-
其他功能、佈局和元件與先前的板版本相同。
-
H743-mini V3 具有 betaflight_4.3。0 預載用於 QC
ArduPilot
-
ArduPilot 4.2 或更高版本支援 ICM42688-P 的 H743-mini-V3,
-
ICM42688-P 定義為第一個 IMU (IMU0),ICM42605 是第二個 (IMU1)。
-
對於 ArduPilot 4.2,將 INS_ENABLE_MASK 設為 7 或預設值 127。
-
建議使用STM32CubeProgrammer擦除MCU並上傳韌體。請參閱此部落格http://www.mateksys.com/?p=6905
INAV
-
從配置器下載的INAV4.1不支援H743-mini-V3。請從我們的網站下載 inav_4.1.0_MATEKH743_42688 。
-
從 INAV5.0 開始,V1/V1.5/V3 將共用相同的韌體。
BetaFlight
-
BetaFlight 4.3 或更高版本支援 IMU ICM42688-p。
-
icm42688-p 是第一個 IMU(預設),ICM42605 是第二個 IMU。
-
BetaFlight 4.2.x 清單中的目標 MATEKH743 不支援 ICM426XX 系列,需要使用 BF4.3_RC 或最新版本進行刷寫
Related Collections