


MATEKSYS H7A3-SLIM 飛控板 - ICM42688P - 30x30
MATEKSYS H7A3-SLIM 飛控板 - ICM42688P - 30x30
MATEKSYS
無法載入取貨服務供應情況
這款 MATEKSYS H7A3-SLIM 飛行控制器 在緊湊的 30x30mm 設計中提供高性能。它配備 STM32H7A3RIT6 MCU、280MHz Cortex-M7 處理器、1.4MB RAM 和 2MB Flash。配合 ICM42688P IMU、SPL06-001 氣壓計、AT7456E OSD 和 128MB Flash 黑匣子,提供精確數據和充足的記錄。控制器包括 6 個 UART、11 個 PWM 輸出、1 個 I2C、1 個 CAN 端口和 4 個 ADC 通道。它還配備三個狀態 LED、USB Type-C 端口和可切換的 9V 輸出。擁有 30.5 x 30.5mm 的安裝圖案、4mm 孔、3mm 橡膠圈,並且僅重 7g,非常適合 FPV 賽車和自由飛行。隨附 3D 步進檔案以便於自定義整合。
特點
- 螢幕顯示
- 30x30 安裝
- 緊湊設計
- 連接性
- 輕量化
規格
規格
- MCU: STM32H7A3RIT6, 280MHz Cortex-M7, 1.4MB RAM, 2MB Flash
- IMU: ICM42688P
- 氣壓計: SPL06-001
- OSD: AT7456E
- 黑匣子: 128MB Flash (1G-bit NAND)
- 6x Uarts (1,2,3,4, 5, 6) 內建反相功能。
- 11x PWM 輸出
- 1x I2C
- 1x CAN
- 4x ADC (VBAT, 電流, VB2, Cur2)
- 3x LED 用於 FC 狀態 (藍色, 紅色) 和 3.3V 指示燈(紅色)
- USB Type-C(USB2.0)
- 8個PWM輸出,通過2個JST-SH1.0_8pin連接器連接2個4合1 ESC
- 1個JST-GH1.25_4pin連接器(5V/CAN-H/CAN-L/G)
- 9V輸出可開關
- 數字視頻OSD由任何空閒的UART支持
電源
- Vbat輸入:6~36V(2~8S LiPo)
- BEC:5V 2A持續(最大3A)
- BEC:9V 2A持續(最大3A)
- LDO 3.3V:最大200mA
- 內建無電流傳感器
- ADC VB2焊盤支持最大69V(電壓分壓器:1K:20K)
FC固件
- ArduPilot:MATEKH7A3(4.6 或更新版本)
- ArduPlane https://firmware.ardupilot.org/Plane/beta/MatekH7A3/
- ArduCopter &https://firmware.ardupilot.org/Copter/beta/MatekH7A3/
- 使用 STM32CubeProgrammer 刷新
物理
- 安裝:30.5 x 30.5mm,Φ4mm 帶橡膠圈 Φ3mm
- 尺寸:36 x 36 x 5 mm
- 重量:7g
- 3D 步驟 H7A3-SLIM_step.zip
包括
- 1x H7A3-SLIM
- 6x 硅膠橡膠圈 M4 到 M3
- 2x JST-SH1.0_8pin 線纜,5cm, & 8pin 連接器
- 1x JST-GH-4P 到 JST-GH-4P 線纜,用於 CAN 端口,20cm
詳細資訊

MATEKSYS H7A3-SLIM 飛行控制器使用 STM32H7A3 MCU,配備 ICM42688P IMU 和 USB-C 端口,安裝模式為 30.5mm。

MATEKSYS H7A3-SLIM 飛行控制器採用緊湊的 30x30 佈局,配備 USB-C 端口和清晰標示的焊接點,以便於整齊布線。

MATEKSYS H7A3-SLIM 使用雙 JST-SH 1.0 8-pin 連接器,加上 JST-GH 4-pin 端口和 USB Type-C,以便於整齊布線和簡單設置。

MATEKSYS H7A3-SLIM 使用清晰標示的焊接點和端口,用於相機/VTx 視頻、UART、CAN 和電源連接。
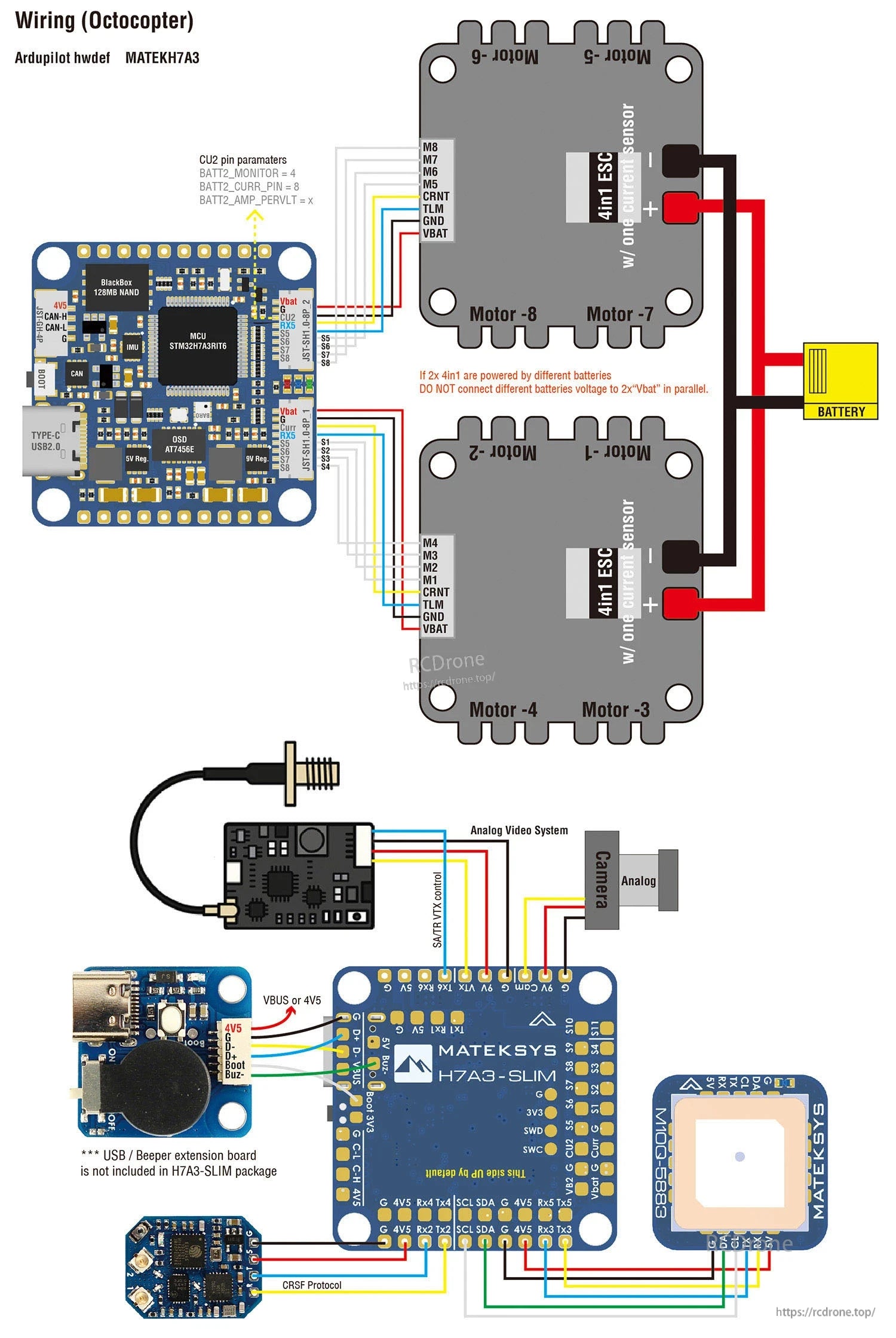
MATEKSYS H7A3-SLIM 使用清晰標示的焊盤來連接雙4合1 ESC、VBAT 電源、GPS、接收器和模擬視頻元件。

ArduPilot 地圖繪製
| ArduPilot | ||||||
| PWM | S1 | PWM1 GPIO50 | 5 V 耐受 I/O | TIM1_CH2 | DMA/Bi-DShot | Group1 |
| S2 | PWM2 GPIO51 | 5 V 耐受 I/O | TIM1_CH3 | DMA/Bi-DShot | ||
| S3 | PWM3 GPIO52 | 5 V 耐受 I/O | TIM2_CH1 | DMA/Bi-DShot | Group2 | |
| S4 | PWM4 GPIO53 | 5 V 耐受 I/O | TIM2_CH2 | DMA/Bi-DShot | ||
| S5 | PWM5 GPIO54 | 5 V 耐受 I/O | TIM3_CH3 | DMA/Bi-DShot | Gourp3 | |
| S6 | PWM6 GPIO55 | 5 V 耐受 I/O | TIM3_CH4 | DMA/Bi-DShot | ||
| S7 | PWM7 GPIO56 | 5 V 耐受 I/O | TIM3_CH1 | DMA/Bi-DShot | ||
| S8 | PWM8 GPIO57 | 5 V 耐受 I/O | TIM3_CH2 | DMA/Bi-DShot | ||
| S9 | PWM9 GPIO58 | 5 V 耐受 I/O | TIM4_CH1 | DMA/DShot | Group4 | |
| S10 | PWM10 GPIO59 | 5 V 耐受 I/O | TIM4_CH2 | DMA/DShot | ||
| S11 | PWM11 GPIO60 | 5 V 兼容 I/O | TIM16_CH1 | DMA/DShot | Group5 | |
| PWM1~PWM11 支援 Dshot 和 PWM。然而,將 Dshot 和正常的 PWM 操作混合使用於輸出是受到限制的, 即在一組中啟用 Dshot 的輸出需要該組中的所有輸出都配置為 Dshot,而不是 PWM 輸出。 如果伺服器和馬達混合在同一組中,請確保該組運行的 PWM 頻率最低符合伺服器的規範。 也就是說,如果伺服器支持最大 50Hz,則 ESC 必須在該組中以 50Hz 運行。 |
||||||
| PINIO | 9V 開關 | GPIO81 | RELAY1_PIN | 81 | ||
| ADC | Vbat 接腳 | BATT_VOLTAGE_SENS | 6~36V | BATT_VOLT_PIN BATT_VOLT_MULT |
10 21.0 |
|
| 電流接腳 | BATT_CURRENT_SENS | 0~3.3V | 電池電流引腳 每伏特安培 |
11 X |
||
| VB2 鈕扣 | BATT2_電壓感測 | 0~69V | BATT2_電壓引腳 BATT2_電壓乘數 |
18 21.0 |
||
| CU2 鈕扣 | BATT2_電流感測 | 0~3.3V | BATT2_CURR_PIN BATT2_AMP_PERVLT |
8 X |
||
| I2C | SCL/SDA | I2C3 | 5V耐受I/O | 板載Baro SPL06-001 | 地址 | 0x76 |
| 數位空速I2C MS4525 DLVR-L10D |
ARSPD_BUS ARSPD_TYPE ARSPD_TYPE |
0 1 9 |
||||
| 磁力計 | COMPASS_AUTODEC | 1 | ||||
| CAN | C-H/C-L | CAN2 | 5V耐受I/O | CAN | CAN_D1_PROTOCOL CAN_P1_DRIVER |
1 1 |
可以 GPS 可以指南針 可以空速傳感器 |
GPS 類型 指南針類型掩碼 空速類型 |
9 0 8 |
| UART | USB | USB | 控制台 | SERIAL0_PROTOCOL | 2 | |
| TX1 RX1 | USART1 w/DMA | 5 V 耐受 I/O | 遙測 | SERIAL1_PROTOCOL | 2 | |
| TX2 RX2 | USART2 w/DMA | 5 V 耐受 I/O | RC 輸入/接收器 | SERIAL2_PROTOCOL | 23 | |
| TX3 RX3 | USART3 w/DMA | 5 V 耐受 I/O | GPS | 序列3協議 | 5 | |
| TX4 RX4 | UART4 無DMA | 5 V 耐受I/O | 備用 | 序列4協議 | -1 | |
| TX5 RX5 | UART5 無DMA | 5 V 耐受I/O | 備用 | 序列5協議 | -1 | |
| TX6 RX6 | USART6 無DMA | 5 V 耐受I/O | 備用 | 序列6協議 | -1 | |
RC 輸入
RC 輸入配置在USART2(序列2)上。它支持所有串行RC协议。默認情況下,SERIAL2_PROTOCOL=23。
- 不支持PPM。
- CRSF需要Tx2 & Rx2連接,並將SERIAL2_OPTIONS設置為“0”(默認)。
- SBUS/DSM/SRXL連接到Rx2引腳,但SBUS要求將SERIAL2_OPTIONS設置為“3”。
- FPort需要連接到Tx2,並將SERIAL2_OPTIONS設置為“7”。如果遙測無法工作,請嘗試設置 SERIAL7_OPTIONS = 135。
- SRXL2需要連接到Tx2,並自動提供遙測。將SERIAL2_OPTIONS設置為“4”。
- 在ArduPilot中,任何UART也可以用於RC系統連接,並且與所有協議兼容,除了PPM。詳情請參見 無線控制系統 。
ArduPilot 繼電器 (PINIO)
- 預設 9V 輸出為開啟
- PC13 PINIO1 輸出 GPIO(81) //9V 電源 switche.g.
- RELAY1_FUNCTION 1
- RELAY1_PIN 81 // PINIO1 GPIO
- RC7_OPTION 28 // 繼電器開/關,使用發射器的 CH7 設定 9V 開/關
當輔助開關的 pwm 值高於 1800 時,配置的功能將被觸發。當值低於 1200 時,將被停用。
使用任務規劃器的初始設置 >> 強制硬體 >> 無線電校準畫面檢查發射器發送的 pwm 值,當開關為高和低時。如果它不高於1800或低於1200,最好在發射器中調整伺服器的端點。
Related Collections


