







MyActuator RH-17 中空諧波機器人關節馬達 – 峰值扭矩54N·m,齒輪比100:1,支援EtherCAT與CAN BUS,雙ABS-17位編碼器
MyActuator RH-17 中空諧波機器人關節馬達 – 峰值扭矩54N·m,齒輪比100:1,支援EtherCAT與CAN BUS,雙ABS-17位編碼器
MyActuator
無法載入取貨服務供應情況
概述
MyActuator RH-17 中空諧波機器人關節馬達是一款專為先進機器人應用設計的高性能驅動器。擁有100:1 齒輪比、54 N·m 峰值扭矩和35 N·m 額定扭矩,確保精確、穩定且強大的運行。具備EtherCAT 和 CAN BUS 通訊、雙 ABS-17BIT 編碼器系統,以及交叉滾子軸承,此馬達提供卓越的控制精度和耐用性。其緊湊的中空設計 (Ø80 mm × 90.2 mm)和1.11 kg 重量使其非常適合需要高扭矩密度和精確運動控制的機器手臂、協作機器人和自動化系統。
主要特點
-
高扭矩與功率:額定扭矩為35 N·m,峰值扭矩為54 N·m,適用於要求苛刻的應用。
-
雙向通訊: 支援EtherCAT和CAN BUS協議,實現無縫整合和快速響應。
-
精確控制: 雙ABS-17BIT編碼器提供精確定位,重複性達到<0.01°。
-
緊湊輕巧: 中空軸設計,重量僅為1.11 kg,優化高扭矩密度。
-
堅固耐用: 配備交叉滾子軸承,增強承載能力和耐用性。
-
工業級可靠性: 絕緣等級F,高速MCU和優化的散熱設計,確保穩定的長期性能。
產品參數
| 參數 | 數值 |
|---|---|
| 齒輪比 | 100:1 |
| 輸入電壓 | 48 V |
| 空載轉速 | 30 RPM |
| 空載電流 | 0.6 A |
| 額定轉速 | 25 RPM |
| 額定扭矩 | 35 N·m |
| 額定功率 | 91 W |
| 額定電流 | 4.7 A (rms) |
| 峰值扭矩 | 54 N·m |
| 峰值電流 | 7.4 A (rms) |
| 反電動勢常數 | 19.2 Vdc/Krpm |
| 模組扭矩常數 | 7.4 N·m/A |
| 馬達相位電阻 | 0.70 Ω |
| 馬達相位電感 | 0.47 mH |
| 極對數 | 10 |
| 反向間隙 | <40 弧秒 |
| 徑向負載 | 靜態: 16.3 kN / 動態: 10.4 kN |
| 軸向負載 | 靜態: 78.2 kN / 動態: 20.8 kN |
| 慣性 | N: 0.52 kg·m² / B: 0.56 kg·m² |
| 重複位置精度 | <0.01° |
| 通訊 | CAN BUS & EtherCAT |
| 重量 | 淨重:1.11 kg / 包裝重:1.28 kg |
| 絕緣級別 | F |
編碼器類型
-
輸入編碼器:ABS-17BIT
-
輸出編碼器:ABS-17BIT
-
提供精確的運動反饋,以增強控制精度。
安裝與尺寸
-
尺寸:Ø80 mm × 90.2 mm
-
安裝:多個通孔和螺紋接口以確保安全安裝。
-
中空軸:優化用於機器手臂和自動化系統中的電纜布線。
介面與接線
-
EtherCAT 端口:用於網絡鏈接的進出端子。
-
CAN BUS 端口:用於通信的 CAN_H 和 CAN_L。
-
電源端子:XT30 連接器以確保可靠的電力傳輸。
-
輔助連接:用於先進控制設置的記憶電池和放電電阻接口。
包裝內容
-
執行器:MyActuator RH-17 中空諧波關節電機 ×1
-
A. 電源線 ×2
-
B. CAN BUS 通信電纜 ×4
-
C.120Ω 終端電阻 ×1
-
D. EtherCAT 通訊電纜 ×2
-
E. CAN BUS 通訊模組 ×1(每個訂單包含免費 USB-CAN 轉接器)
應用
-
協作機器手臂
-
工業自動化系統
-
類人及四足機器人
-
精密運動平台
-
用於研究與開發的自主機器關節
詳細資訊

機器人馬達 RH-17 提供雙編碼器、CAN BUS 和 EtherCAT,100:1 齒輪比,48V,35 N.m 扭矩,91W 功率。可選擇有/無剎車。包含圖紙和參數。
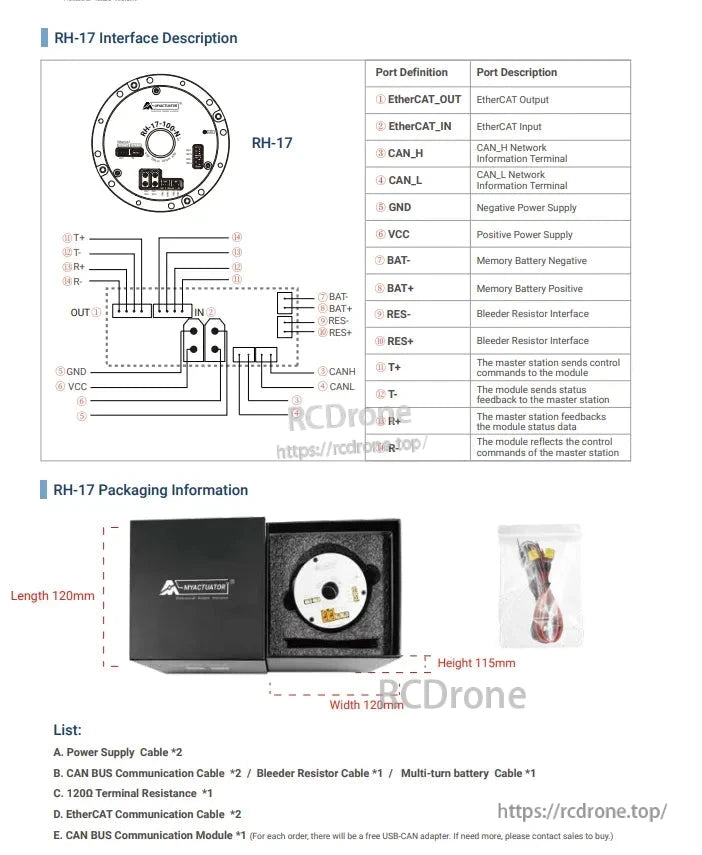
RH-17 接口包括 EtherCAT、CAN 總線、電源和電池連接。包裝內含電纜、電阻和模組。尺寸:120×120×115mm。清單包括電源、CAN、EtherCAT 電纜、電阻和通訊模組。
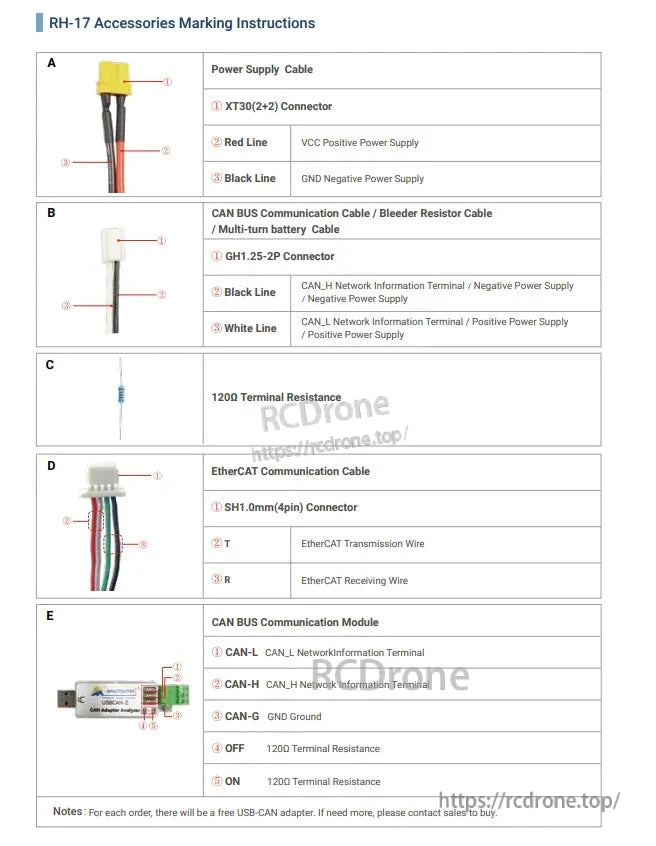
RH-17 配件包括電源、CAN 總線、EtherCAT 電纜、120Ω 電阻和通訊模組。詳細信息涵蓋每個組件的連接器、線材顏色、功能和端子電阻。訂單中包含 USB-CAN 轉接器。
Related Collections







