






MyActuator RH-32 中空諧波機器人關節模組,48V,229Nm 峰值扭矩,雙 17 位編碼器,CAN BUS & EtherCAT 控制
MyActuator RH-32 中空諧波機器人關節模組,48V,229Nm 峰值扭矩,雙 17 位編碼器,CAN BUS & EtherCAT 控制
MyActuator
無法載入取貨服務供應情況
概述
MyActuator RH-32 中空諧波機器人關節模組是一款高扭矩、高精度的驅動器,專為機器手臂、人形機器人和協作自動化系統設計。它具有100:1的齒輪比、48V輸入電壓和229 N·m的峰值扭矩,RH-32確保在需要平滑運動、精確控制和高負載能力的應用中提供卓越性能。支持雙編碼器(17位輸入/輸出)、CAN BUS &和EtherCAT通訊,以及中空軸設計,使其能夠無縫集成到先進的機器人系統中。
主要特點
-
高扭矩性能 – 提供高達150 N·m的額定扭矩和229 N·m的峰值扭矩,非常適合重型機器人關節。
-
精確控制 – 雙17位元編碼器確保反饋的精確性和重複性 <0.01°.
-
多功能通訊 – 支援 CAN BUS 和 EtherCAT,以實現可靠且靈活的系統整合。
-
強大的負載能力 – 可承受高達 342.6 kN 軸向靜態負載 和 81.6 kN 軸向動態負載。
-
緊湊的中空設計 – 便於通過關節進行電纜布線,實現更乾淨和更安全的機器人設置。
-
高可靠性 – 評級 F 絕緣等級 和先進的散熱設計,確保工業耐用性。
技術規格
| 參數 | 單位 | 數值 |
|---|---|---|
| 齒輪比 | — | 100 |
| 輸入電壓 | V | 48 |
| 空載轉速 | RPM | 20 |
| 空載電流 | A | 2.8 |
| 額定轉速 | RPM | 18 |
| 額定扭矩 | N·m | 150 |
| 額定功率 | W | 282 |
| 額定電流 | A(rms) | 21.8 |
| 峰值扭矩 | N·m | 229 |
| 峰值電流 | A(rms) | 32.1 |
| 馬達反電動勢常數 | Vdc/Krpm | 26.7 |
| 模組扭矩常數 | N·m/A | 6.9 |
| 馬達相位電阻 | Ω | 0.08 |
| 馬達相位電感 | mH | 0.18 |
| 極對 | — | 10 |
| 三相連接 | — | Y |
| 間隙 | 弧秒 | < 40 |
| 徑向載荷(靜態/動態) | kN | 65.4 / 38.2 |
| 軸向載荷(靜態/動態) | kN | 342.6 / 81.6 |
| 慣性 (N/B) | kg·m² | 6.86 / 8.32 |
| 編碼器類型 | — | 雙編碼器 ABS-17BIT (輸入/輸出) |
| 重複位置精度 | 度 | < 0.01 |
| 通訊 | — | CAN BUS &和 EtherCAT |
| 重量 (N/B) | 公斤 | 4.32 / 4.74 |
| 絕緣等級 | — | F |
介面描述
RH-32 支援 EtherCAT 和 CAN 通訊,提供可靠的即時控制。
-
EtherCAT:用於工業自動化的高速確定性通訊。
-
CAN BUS: 為複雜的多關節系統提供靈活且穩定的通信。
-
專用連接器 用於電源、反饋和控制信號,確保安全高效的整合。
包裝資訊
-
盒子尺寸: 165mm × 165mm × 127mm
-
包含配件:
-
電源線 × 2
-
CAN BUS 通訊線 × 2
-
放電電阻線 × 1
-
多圈電池線 × 1
-
120Ω 終端電阻 × 1
-
EtherCAT 通訊線 × 2
-
CAN BUS 通訊模組 × 1(附贈 USB-CAN 轉接器)
- MyActuator RH-32-100 機器人關節模組 x 1
-
應用領域
-
協作機器人 (cobots)
-
人形及服務機器人
工業機械手
-
自動引導車輛 (AGVs)
-
精密定位系統
詳細資訊
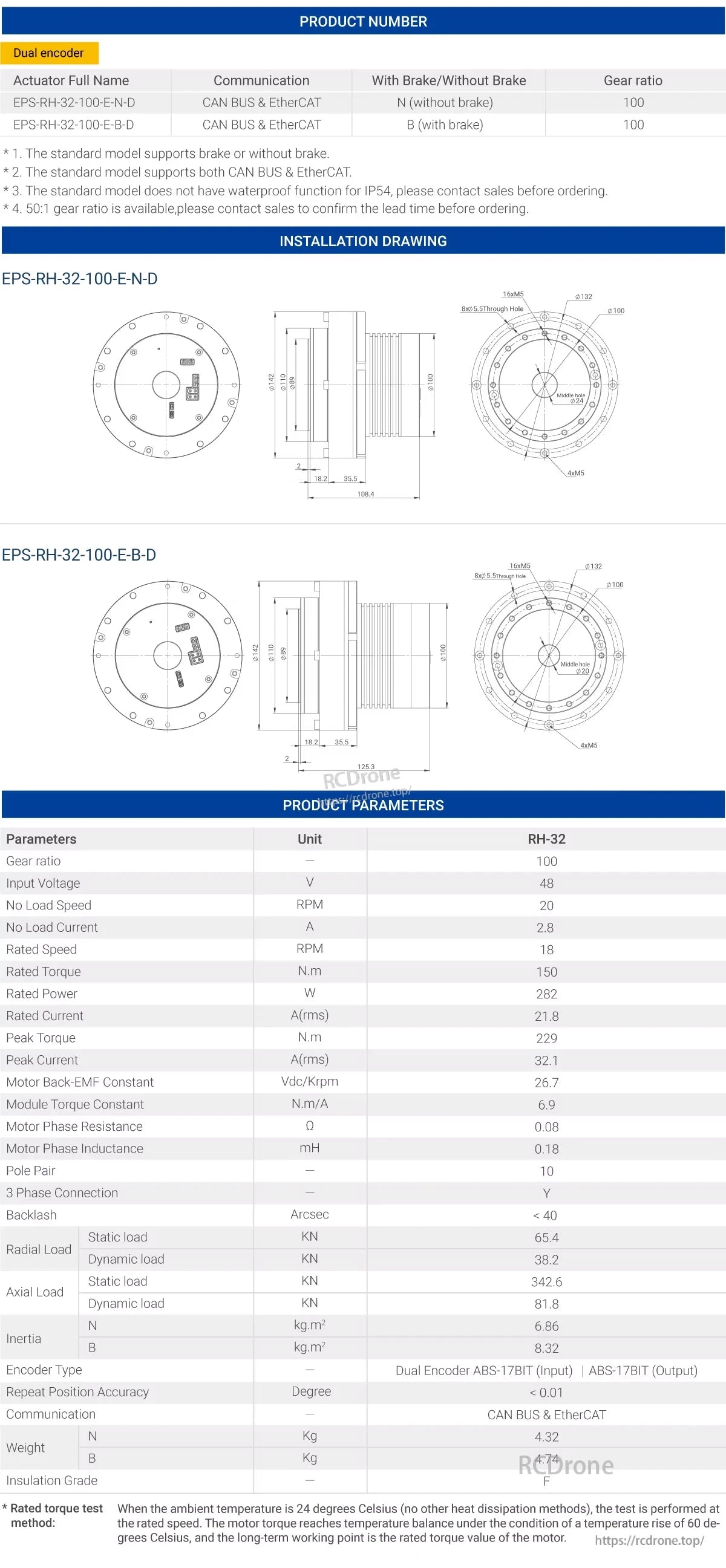
機器人關節 RH-32 提供雙編碼器、CAN BUS/EtherCAT、100:1 齒輪比、48V、150 N.m 扭矩,21。8 A 目前。可選的剎車,IP54 可用。
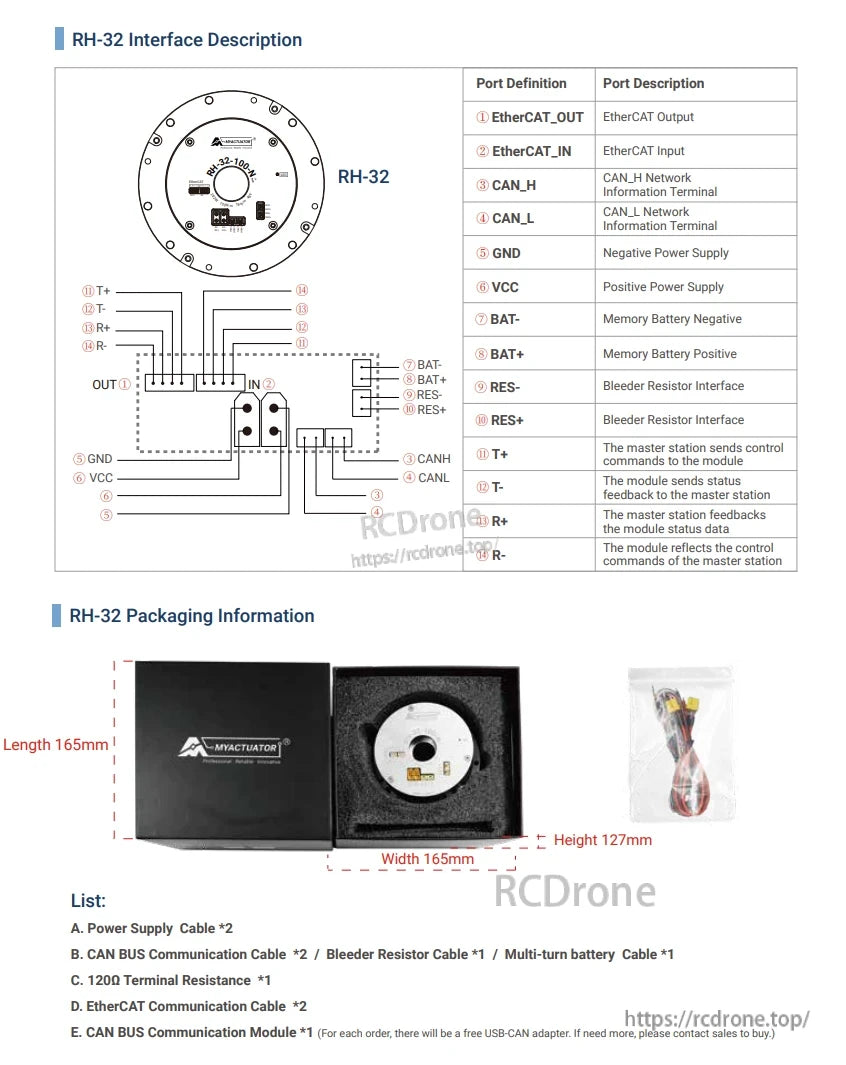
機器人關節 RH-32 具備 EtherCAT 和 CAN 接口,端口定義,尺寸 165x165x127mm。包括電纜、終端電阻、CAN 模塊。
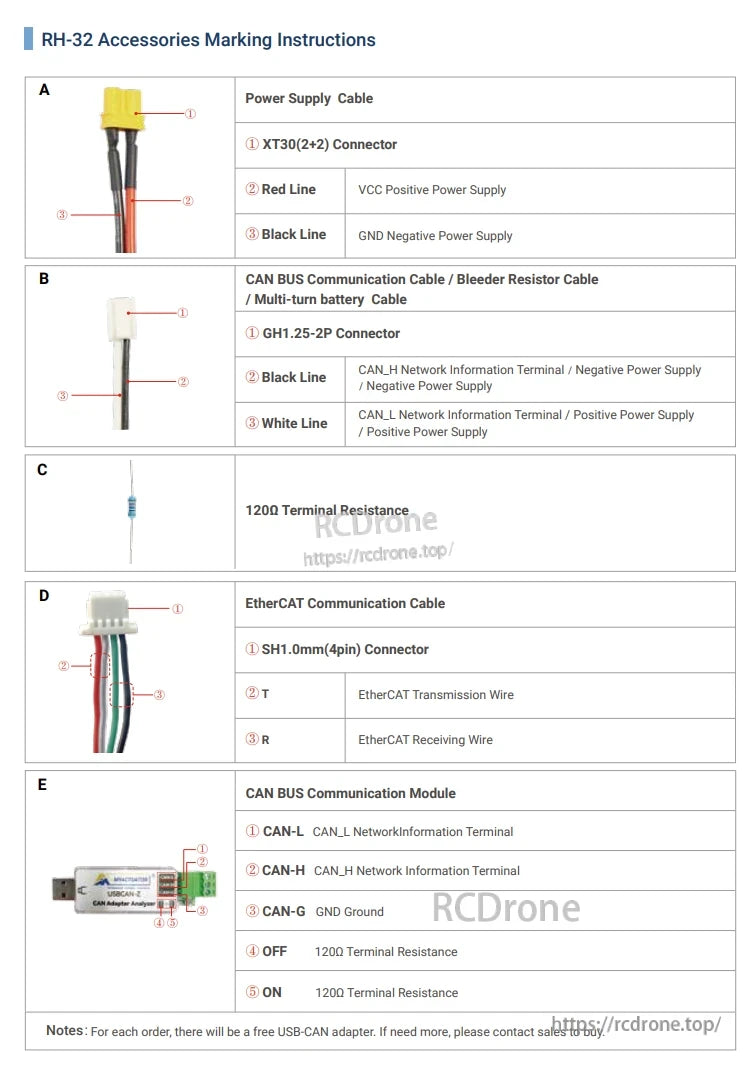
RH-32 配件包括電源、CAN BUS、EtherCAT 電纜、120Ω 電阻和 CAN 模塊。詳細信息涵蓋連接器、電線功能和終端電阻,以確保正確的安裝和通信。每個訂單均附贈免費 USB-CAN 轉接器。
Related Collections






