





MyActuator RMD-X2-7 機器人行星執行器 7N·m 24V 28:1 雙編碼器 CAN EtherCAT 伺服馬達
MyActuator RMD-X2-7 機器人行星執行器 7N·m 24V 28:1 雙編碼器 CAN EtherCAT 伺服馬達
MyActuator
無法載入取貨服務供應情況
概述
MyActuator RMD-X2-7 行星致動器是一款專為機器人、自動化和運動控制應用設計的緊湊型高精度伺服齒輪馬達。它具有28.17:1 齒輪比、雙編碼器(ABS 17位輸入 / 18位輸出),並支持CAN BUS和EtherCAT通信,確保穩定的扭矩輸出和精確的定位。其額定扭矩為2.5 N·m,峰值扭矩為7 N·m,額定速度為142 RPM,這款致動器在輕量化0.26 kg的外形中提供可靠的動力。
主要特點
-
高精度控制 – 雙編碼器系統(17位輸入,18位輸出),控制精度<0.01°。
-
強大性能 – 額定功率37 W,額定電流3 A,效率為63%。
-
緊湊設計 – 直徑 44 毫米,長度 63.5 毫米,重量僅 0.26 公斤.
-
平滑運動 – 田口控制 (FOC),低背隙 (≤12 弧分),扭矩常數 0.8 N·m/A.
-
耐用性 – 深溝球軸承,絕緣等級 F,堅固的鋁外殼。
-
靈活連接性 – 兼容 CAN BUS 和 EtherCAT 協議。
-
安全與穩定性 – 峰值電流 8.1 A,額定效率,和不同相電流下的失速扭矩耐久性測試。
規格
| 參數 | 值 |
|---|---|
| 齒輪比 | 28。17:1 |
| 輸入電壓 | 24 V |
| 空載轉速 | 178 RPM |
| 額定轉速 | 142 RPM |
| 額定扭矩 | 2.5 N·m |
| 峰值扭矩 | 7 N·m |
| 額定功率 | 37 W |
| 額定相電流 | 3 A (rms) |
| 峰值相電流 | 8.1 A (rms) |
| 效率 | 63% |
| 電動機反電動勢常數 | 4.3 Vdc/Krpm |
| 扭矩常數 | 0.8 N·m/A |
| 電動機電阻 | 0.61 Ω |
| 電動機電感 | 0.13 mH |
| 極對 | 13 |
| 反驅動扭矩 | 0.4 N·m |
| 間隙 | ≤12 弧分 |
| 軸承類型 | 深溝球軸承 |
| 軸向負載 | 0.25 KN |
| 徑向負載 | 1 KN |
| 慣性 | 0.17 Kg·cm² |
| 編碼器類型 | 雙編碼器 ABS-17位(輸入)/18位(輸出) |
| 通訊 | CAN BUS / EtherCAT |
| 重量 | 0.26 kg |
| 絕緣級別 | F |
堵轉扭矩數據
| 扭矩 (N·m) | 溫升 (°C) | 堵轉時間 (s) | 相電流 (A rms) |
|---|---|---|---|
| 3.75 | 20 | 15 | 4.3 |
| 5.0 | 48 | 10 | 5.7 |
| 6.25 | 31 | 8 | 7.4 |
| 7.5 | 59 | 5 | 8.6 |
配件(包含)
-
電源 + CAN BUS 通訊電纜 ×1
-
120Ω 終端電阻 ×1
-
EtherCAT 通訊電纜 ×2
-
CAN BUS 通訊模組(USB-CAN 轉接器) ×1
應用
這款 MyActuator RMD-X2-7 非常適合用於 機器手臂、人形機器人、外骨骼、雲台和工業自動化 系統,這些系統需要精確的扭矩控制、緊湊的尺寸和雙通道通訊。
詳細資訊

X2-7 無刷伺服馬達,雙編碼器 ABS-17BIT 輸入/18BIT 輸出,37W,2.5N.m,142rpm,CAN bus,128,LED 指示燈。

RMD X2-7 行星驅動器,具備 EtherCAT+CAN BUS 雙編碼器。特點 28。17 齒輪比,24V 輸入,142RPM 速度,2.5N.m 扭矩,和 37W 功率。包括安裝尺寸和技術規格。

RMD-X2-P28-7 提供雙編碼器,24V 輸入,2.5N.m 扭矩,142 RPM,CAN BUS/EtherCAT,和 0.26kg 重量。包括安裝圖和詳細規格,如堵轉扭矩和電氣數據。

X2-7 接口包括 VCC、GND、CAN_H、CAN_L、EtherCAT IN/OUT,以及 T+/T-、R+/R- 端口。包裝:65x65x55mm 的盒子,內含電源、CAN 線、120Ω 電阻、EtherCAT 線和兩個 CAN 模塊。每個訂單附贈免費 USB-CAN 轉接器。
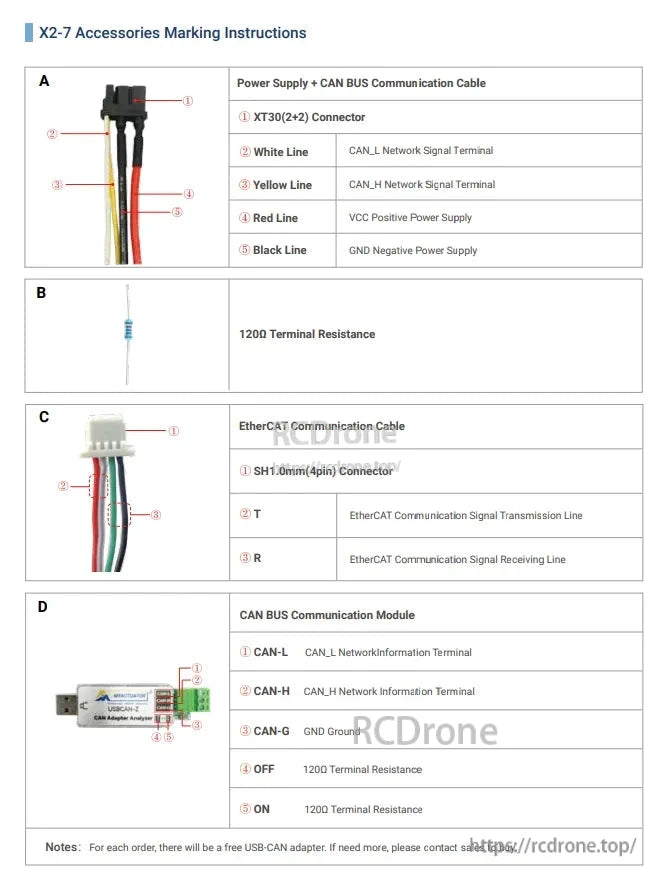
標記說明詳細說明電源、CAN BUS、EtherCAT 線纜、連接器、端子電阻。包括訂單的 USB-CAN 轉接器說明。

MYACTUATOR X2-7 伺服電機提供 37W 功率和 2.5N.m 扭矩,具備雙編碼器、1.42rpm 速度和 1:28 齒輪比。它包括一個電源、CAN BUS 通信電纜、終端電阻、EtherCAT 電纜和一個 CAN 模塊。隨附一個免費的 USB-CAN 轉接器。標記為 VCC、GND、CANH、CANL 和信號 I/O 確保輕鬆設置。通過 CE 和 RoHS 認證,提供專業、可靠和創新的性能。
Related Collections





