






MyActuator RMD-X4-10 行星執行器 10N·m 雙編碼器 EtherCAT+CAN 機器人關節驅動
MyActuator RMD-X4-10 行星執行器 10N·m 雙編碼器 EtherCAT+CAN 機器人關節驅動
MyActuator
無法載入取貨服務供應情況
概述
這款MyActuator RMD-X4-10 行星驅動器是一款高性能的直流電機關節模組,專為先進的機器人應用而設計。它具有12.6:1行星齒輪比、10N·m峰值扭矩和100W額定輸出功率,並整合了雙編碼器系統(17位輸入 / 18位輸出),提供0.01°精確控制。其大型中空結構支持多傳感器集成,使其成為人形機器人全身姿態控制的中央樞紐。通過EtherCAT和CAN雙協議通信,該驅動器實現了250μs超快響應,非常適合高動態、高可靠性的場景,如人形機器人、生物腿驅動和工業自動化。
主要特點
-
高精度雙編碼器:17位輸入 / 18位輸出,精度達到0。01° 精度
-
峰值扭矩 10N·m,配備 12.6:1 行星齒輪比
-
交叉滾子軸承:卓越的抗彎矩能力,確保機器人關節穩定
-
EtherCAT + CAN Bus 雙重通信:支持多機器聯動,超快 250μs 響應
-
大型中空結構:可整合傳感器、電纜和滑環,適用於複雜的機器人系統
-
高可靠性:設計用於人形步態控制,實現跑步、跳躍和複雜動作的平滑過渡
-
緊湊且輕量:Φ55mm × 55.5mm,重量 0。33kg
規格
| 參數 | 數值 |
|---|---|
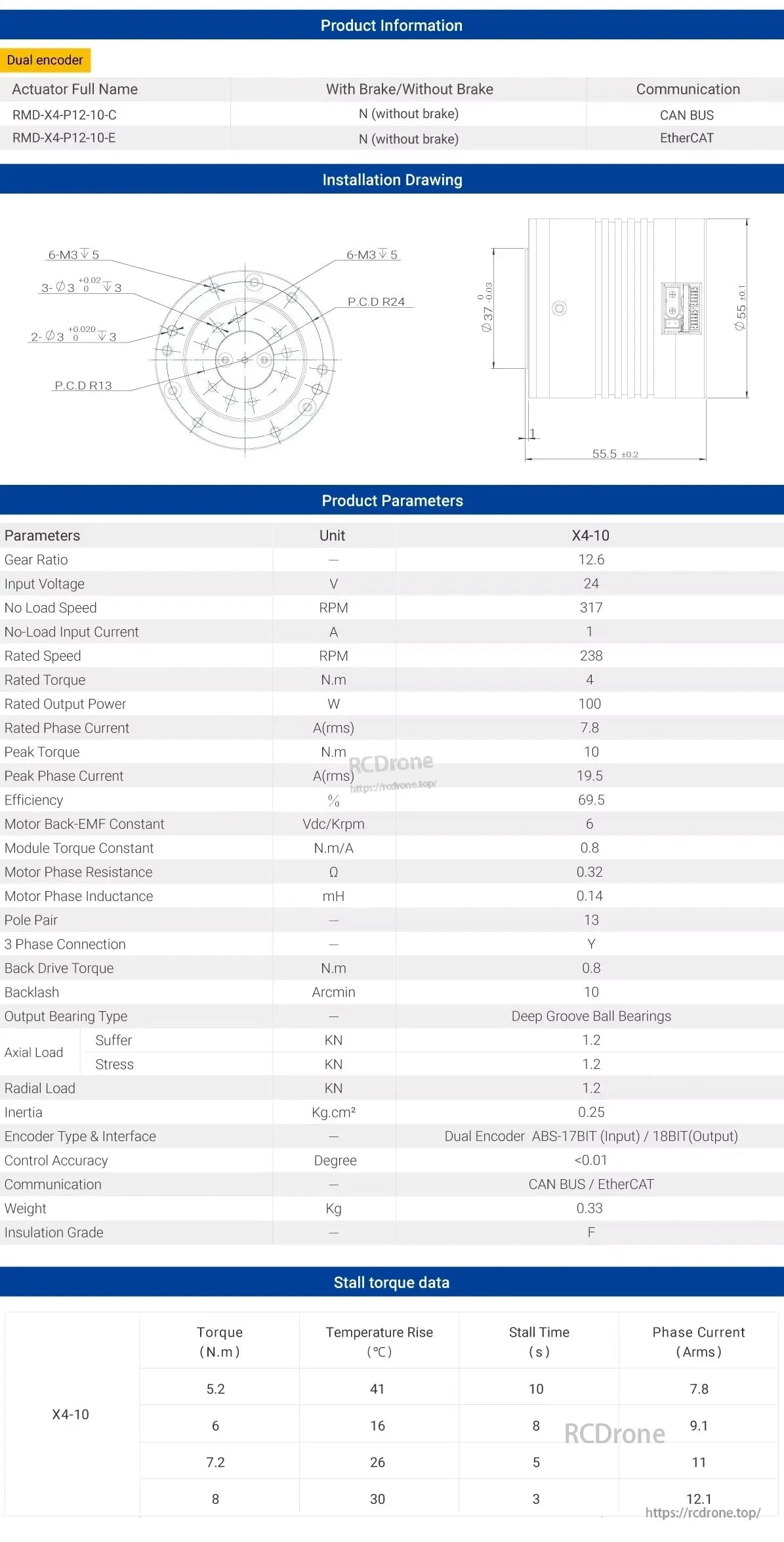
| 型號 | RMD-X4-10 |
| 齒比 | 12.6:1 |
| 輸入電壓 | 24V DC |
| 額定轉速 | 238 RPM |
| 空載轉速 | 317 RPM |
| 額定輸出功率 | 100W |
| 額定扭矩 | 4N·m |
| 峰值扭矩 | 10N·m |
| 額定電流 | 7.84A |
| 無負載電流 | 1A |
| 編碼器類型 | 雙編碼器 (ABS-17位 / 18位) |
| 通訊 | EtherCAT + CAN總線 |
| 重量 | 0.33kg |
| 尺寸 | Ø55mm × 55.5mm |
應用
-
類人機器人 – 用於手臂、腿部和軀幹的關節驅動器
-
仿生腿驅動器 – 高扭矩及防彎曲設計,適用於跑步和跳躍步態
-
協作機器人 – 用於工業自動化的平滑運動控制
-
外骨骼 – 輕量、高動態的驅動器,用於人類輔助設備
-
靈活生產線 – 通過EtherCAT高速通信實現多軸同步
包裝及配件
-
電源 + CAN總線通信電纜 ×1
-
120Ω端子電阻 ×1
EtherCAT 通訊電纜 ×2
-
CAN 總線通訊模組 ×1(每個訂單包含 USB-CAN 轉接器)
包裝尺寸:100mm × 100mm × 70mm
詳細資訊

RMD-X4-PT2.5-10-C 雙編碼器機器人關節驅動器,輸入電壓 24V,齒輪比 12.6,扭矩 4N·m,輸出功率 100W。特點包括 CAN BUS/EtherCAT 接口,317RPM 空載速度,重量 0.28kg。包含安裝尺寸和技術規格。

行星執行器,峰值扭矩 10N.m,齒輪比 12.6:1,重量 0.33kg。尺寸:Ø55mm×55.5mm。特點包括 EtherCAT/CANBUS 通信、雙編碼器、高速 MCU、CAN 芯片和深溝球軸承。

雙編碼器 ABS-17BIT 輸入 / 18BIT 輸出,X4-10,序號:40225621,MYACTUATOR

MYACTUATOR 的 RMD-X4-10 行星執行器提供 100W 功率,46Nm 扭矩,雙編碼器,238rpm 速度。隨附電源 + CAN BUS 電纜,120Ω 電阻,EtherCAT 電纜,CAN BUS 模塊,以及免費 USB-CAN 轉接器。
RMD-X4-10 機器人行星執行器 配備雙編碼器,12。6速比,24V輸入,100W輸出,並具備CAN BUS/EtherCAT。它提供4N.m的扭矩,238 RPM的速度,重量為0.33kg,並使用深溝球軸承以提高效率。

X4-10接口包括電源、CAN和EtherCAT端口。包裝內含電源、電纜、電阻和模塊。尺寸:100x100x70mm。每個訂單均包含USB-CAN適配器。

X4-10配件包括電源、CAN BUS和EtherCAT電纜、終端電阻和CAN BUS模塊。詳細信息涵蓋連接器、電線功能、信號線和USB-CAN適配器說明。
Related Collections






