





MyActuator RMD-X4-36 34N·m 行星執行器直流無刷馬達,雙編碼器,支援 EtherCAT 與 CAN Bus,36:1 減速比
MyActuator RMD-X4-36 34N·m 行星執行器直流無刷馬達,雙編碼器,支援 EtherCAT 與 CAN Bus,36:1 減速比
MyActuator
無法載入取貨服務供應情況
概述
MyActuator RMD-X4-36 行星致動器 DC 無刷馬達是一款高性能的關節致動器,專為需要精確運動控制、高扭矩輸出和緊湊整合的機器人和自動化系統而設計。其具有34N·m 峰值扭矩、36:1 齒輪比和交叉滾子軸承結構,提供卓越的抗彎曲能力和耐用性。此致動器具備EtherCAT + CAN 雙重通訊協議和250μs 超快速響應,非常適合人形機器人、機器手臂、移動平台及其他先進的機器人應用。其雙編碼器設計(ABS 17位輸入 / 18位輸出)確保超高的定位精度,而緊湊的尺寸(55mm × 61mm,0.36kg)則使得輕量化和高效整合成為可能。
主要特點
-
高精度雙編碼器: 17位(輸入)+ 18位(輸出),精度達到0.01°。
-
EtherCAT + CAN總線協議: 靈活的通信,250μs超快速響應。
-
交叉滾子軸承: 優越的抗彎性能和長壽命。
-
高功率密度: 緊湊的55mm直徑,61mm長度,重量僅為0.36kg。
-
峰值扭矩34N·m和額定扭矩11.5N·m確保穩定而強大的運動輸出。
-
高效率: 100W額定功率,配備平滑的FOC(場導向控制)技術。
-
多功能應用: 設計用於人形機器人、外骨骼、操控器和自動化系統。
規格
| 參數 | 數值 |
|---|---|
| 型號 | RMD-X4-P36-36-C |
| 輸入電壓 | 24V |
| 齒輪比 | 36:1 |
| 空載轉速 | 111 RPM |
| 空載電流 | 0.9 A |
| 額定轉速 | 83 RPM |
| 額定扭矩 | 11.5 N·m |
| 額定輸出功率 | 100 W |
| 峰值扭矩 | 34 N·m |
| 峰值相電流 | 21.5 A (rms) |
| 極對 | 13 |
| 編碼器類型 | 雙編碼器 ABS 17位元(輸入)/ 18位元(輸出) |
| 通訊協議 | EtherCAT / CAN Bus |
| 尺寸 | Ø55mm × 61mm |
| 重量 | 0.36 kg |
包裝內容
-
1 × RMD-X4-36 行星驅動馬達
-
1 × 電源 + CAN總線通訊電纜
-
1 × 120Ω 終端電阻
-
2 × EtherCAT 通訊電纜
-
1 × CAN總線通訊模組 (USB-CAN 轉接器)
應用
-
人形及仿生機器人
-
協作機器手臂
-
外骨骼及康復機器人
-
服務機器人及移動平台
-
需要緊湊、高扭矩驅動器的精密自動化系統
詳細資訊

行星致動器,具有34N.m峰值扭矩,36:1齒輪比,0。36kg 重量,Ø55mm×61mm 尺寸。特點包括 EtherCAT/CANBUS 通訊、雙編碼器、高速 MCU、CAN 晶片和交叉滾子軸承。

RMD-X4-P36-36 電機:24V,10.5N.m 扭矩,83RPM,雙編碼器,EtherCAT+CAN BUS,36 齒比,0.36kg,ABS-17BIT/18BIT 編碼器,詳細尺寸包含。

X4-36 電機,100W,12N.m,雙編碼器,17BIT 輸入,18BIT 輸出,63rpm,1:36 齒比,CAN bus 接口,LED 指示燈。

MYACTUATOR X4-36 電機,100W,12N.m,雙編碼器,83rpm,1:36 齒比。包括電源、CAN BUS 電纜、120Ω 電阻、EtherCAT 電纜和帶免費 USB-CAN 轉接器的 CAN BUS 模塊。
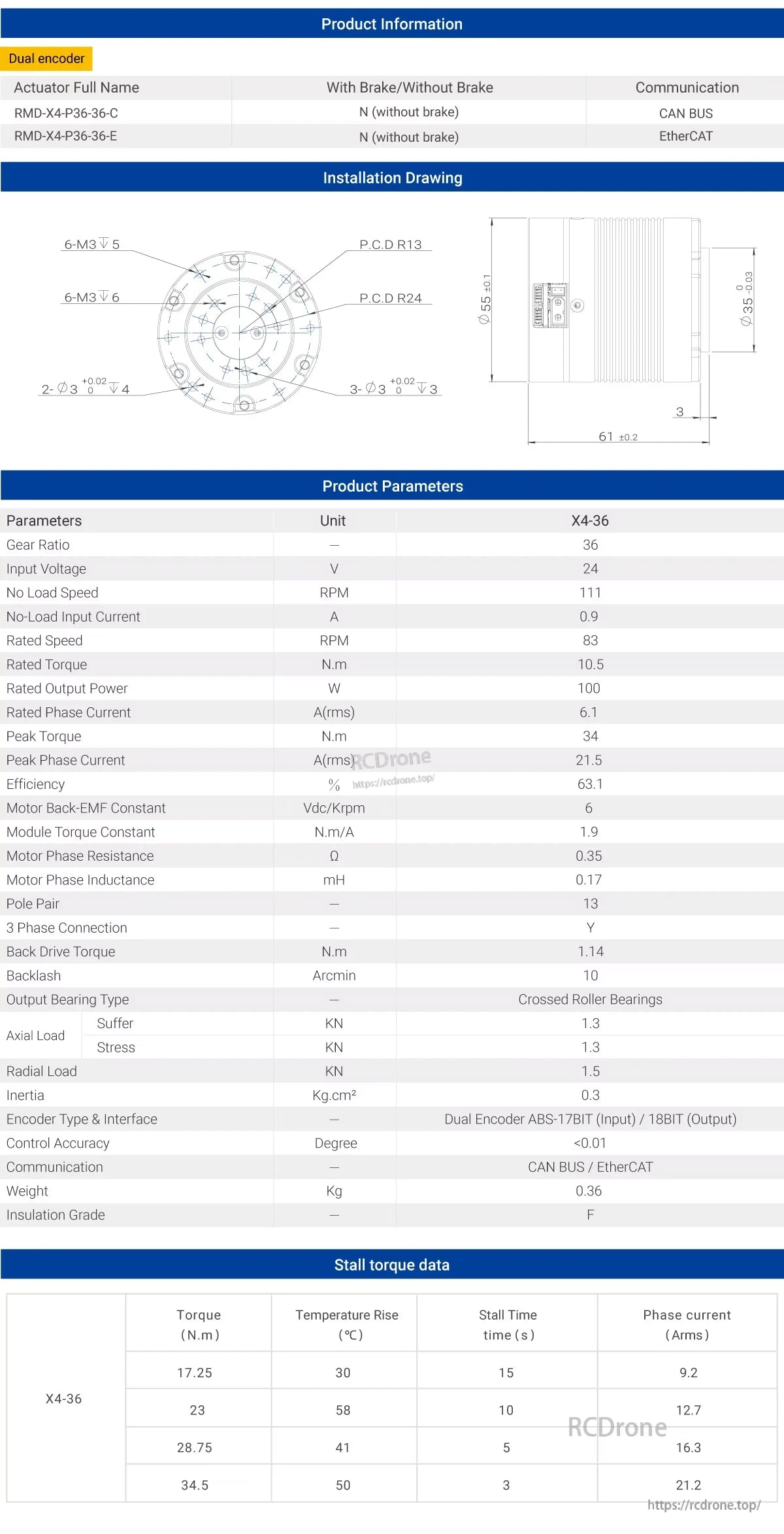
RMD-X4-P36-36 電機具有雙編碼器,36 齒比,24V 輸入,100W 輸出,CAN BUS/EtherCAT。額定扭矩:10.5 N.m,速度:83 RPM,重量:0.36 kg。堵轉扭矩數據包括扭矩、溫升、時間和相電流值。

介面細節包括電源、CAN和EtherCAT端口。包裝內含馬達、電纜、電阻、通訊模組。尺寸:100x100x70mm。包含USB-CAN轉接器。
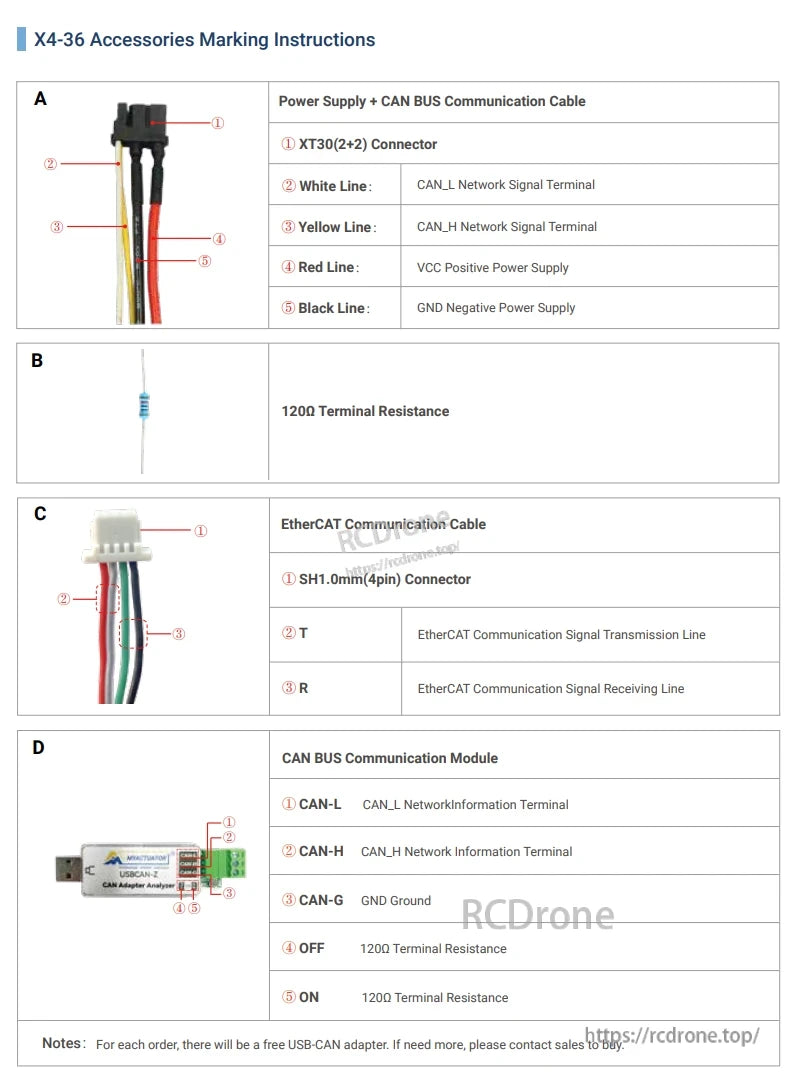
X4-36配件包括電源、CAN BUS、EtherCAT電纜、120Ω電阻和CAN模組。細節涵蓋連接器、電線顏色、信號線和通訊及電源連接的端子設置。每個訂單均附有USB-CAN轉接器。
Related Collections





