




MyActuator RMD-X8-120 伺服馬達執行器 48V 574W 110N·m 峰值扭矩 雙編碼器 EtherCAT CAN BUS 適用於機器人及機械臂
MyActuator RMD-X8-120 伺服馬達執行器 48V 574W 110N·m 峰值扭矩 雙編碼器 EtherCAT CAN BUS 適用於機器人及機械臂
MyActuator
無法載入取貨服務供應情況
概述
這款 MyActuator RMD-X8-120 伺服電機整合了 行星齒輪箱、雙17位編碼器,以及 高性能驅動控制器,提供強大的扭矩和精確的運動控制。擁有 574W 額定功率、43N·m 額定扭矩,以及高達 110N·m 峰值扭矩,非常適合人形機器人、機械手臂、四足機器人及其他智能自動化系統。支持 CAN BUS 和 EtherCAT 協議,確保與現代機器人平台的無縫整合。
主要規格
| 參數 | 數值 |
|---|---|
| 型號 | RMD-X8-P20-120-C |
| 齒輪比 | 19.612:1 |
| 電壓 | 48V |
| 空載轉速 | 158 RPM |
| 額定轉速 | 127 RPM |
| 空載電流 | 1.6 A |
| 額定扭矩 | 43 N·m |
| 峰值扭矩 | 110 N·m |
| 峰值相電流 | 43.8 A (rms) |
| 額定功率 | 574 W |
| 重量 | 1.4 kg |
| 尺寸 | Φ96 mm × 76 mm 高度 |
| 編碼器類型 | 雙編碼器 ABS-17BIT (輸入) / 17BIT (輸出) |
| 通訊 | CAN BUS / EtherCAT |
介面與連接性
-
EtherCAT IN/OUT 用於高速、即時通訊
-
CAN_H & CAN_L 接口用於 CAN BUS 網絡
-
VCC/GND 用於電源輸入 (48V)
-
信號通道 (T-/T+/R-/R+) 用於命令和狀態反饋
隨附配件
-
2× 電源 + CAN BUS 通訊電纜
2× EtherCAT 通信電纜
-
1× 120Ω 終端電阻
-
1× CAN BUS 通信模組,配備 USB-CAN 轉接器
主要特點
-
高精度控制 – 雙17位絕對編碼器實現精確的位置、速度和扭矩控制。
-
高扭矩輸出 – 額定扭矩 43N·m,峰值 110N·m,適用於高要求的負載。
-
一體化設計 – 緊湊結構,配備行星齒輪箱和驅動模塊,便於安裝。
-
雙協議支持 – 兼容 CAN BUS 和 EtherCAT,實現靈活集成。
-
堅固的結構 – 高強度交叉滾子軸承確保在重負載下的耐用性。
應用
-
類人機器人關節
-
協作機器手臂
-
四足和雙足機器人
-
外骨骼系統
-
自主移動平台
-
高精度工業自動化
詳細資訊

M-RMD X8-120 伺服驅動器提供雙編碼器、48V輸入、43 N.m扭矩、574W功率、CAN BUS/EtherCAT、19.612齒比、10對極、1.40公斤重量及失速扭矩詳細資訊。
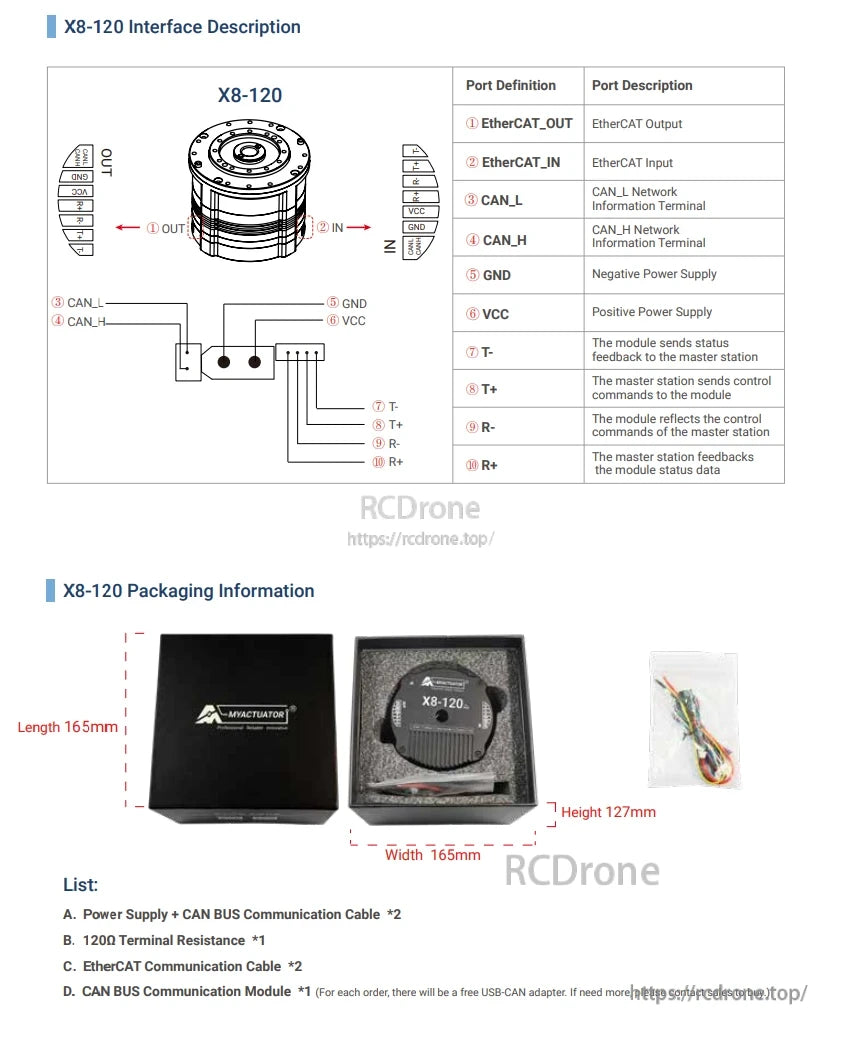
X8-120伺服介面支持EtherCAT和CAN總線,包括電源、信號連接和USB-CAN適配器。包裝尺寸:165x165x127mm。包含電源、電纜、端子電阻和通信模塊。

MyActuator X8-120 配件包括帶有 CAN BUS 線纜的電源、120Ω 終端電阻、EtherCAT 線纜和 CAN BUS 模塊。詳細信息涵蓋連接器、電線功能和通信及電源的端子。每個訂單均附贈免費 USB-CAN 轉接器。

MyActuator X8-120 伺服電機,574W,45N.m,雙編碼器,127rpm,1:20 比率。包括電源+CAN BUS 線纜、EtherCAT 線纜和 120Ω 終端器。CE ROHS 認證。

EtherCAT + CAN BUS 雙編碼器伺服,型號 RMD-X8-P20-120-C,48V,19.612 減速比,127RPM,43N.m 扭矩,574W 輸出,1.4kg 重量,具備高速 MCU、CAN 晶片和交叉滾子軸承。

雙編碼器 ABS-17BIT 輸入/輸出,X8-120CL,支持力-位置混合控制,精確扭矩控制。

MYACTUATOR X8-120伺服器,配備電源、CAN BUS、EtherCAT電纜和120Ω終端。包裝包括兩條電源和通信線。

集成行星齒輪模組,雙編碼器,EtherCAT/CAN通信,峰值扭矩120N.m,尺寸96mm×76mm,適用於機器人關節。
Related Collections




