





OYMotion ROH-AP001 靈巧機器人手,6自由度,11關節,力感測器,UART/RS485/CAN,PID控制,0.7秒
OYMotion ROH-AP001 靈巧機器人手,6自由度,11關節,力感測器,UART/RS485/CAN,PID控制,0.7秒
OYMotion
無法載入取貨服務供應情況
概述
OYMotion ROH-AP001靈巧手是一款擁有11個可動關節和6個內置馬達驅動器的機器手,提供6個主動自由度。內置的PID馬達控制算法能夠實現對物體的準確、可重複的抓取和操作。每根手指都集成了一個力傳感器,用於實時監測和閉環控制抓取力。物理接口包括UART、RS485或CAN FD,支持SerialCtrl專用串行協議、ModBus-RTU和CAN協議。支持ROS/ROS2平台的二次開發,通過SDK(需要許可協議)。
主要特點
- 6個主動自由度和11個關節;獨立電動手指實現自然抓握。
- 內置馬達驅動器和PID控制;所有驅動集成在手中。
- 每根手指上的力傳感器,具觸覺反饋和實時力控制。
- 具動力的拇指旋轉加上可折疊的手指設計。
- 支持在指尖進行觸控操作。
- 快速運動:0.7秒全範圍彎曲/伸展和0.7秒拇指全範圍旋轉。
- 負載能力:四根手指(彎曲)可承受高達30公斤的靜態負載,每根手指(彎曲)10公斤,每根手指(伸展)8公斤。
- 人類般的大小和比例;柔軟的手指墊和矽膠手套;定制的手腕設計;消息提示器。
- 接口和協議:UART/RS485/CAN,配合SerialCtrl和ModBus-RTU;CAN以1M波特率運行。
- 所用材料:鋁合金、鋅合金、不銹鋼、矽膠、塑料。
規格
| 活動自由度 | 6 |
| 可動關節 (關節連接) | 11 |
| 中指尖到手腕的垂直距離 | 183 毫米 |
| 拇指尖到手腕的垂直距離 | 95 毫米 |
| 拇指長度 | 111 毫米 |
| 最大掌寬 | 82 毫米 |
| 手腕直徑 | 49 毫米 |
| 拇指側邊的最大開合角度 | 0~31 ° |
| 拇指到掌心的最大開合角度 | 0~50 ° |
| 拇指側向旋轉角度 | 0~90 ° |
| 在最大速度下全範圍彎曲/伸展時間 | 0。7 秒 |
| 拇指在最大速度下全範圍的旋轉時間 | 0.7 秒 |
| 每個手指尖在拉伸狀態下的主動力 | ≥0.5 Kgf |
| 每個手指尖在彎曲狀態下的主動力 | ≥1.0 Kgf |
| 拇指尖的最大主動力 | ≥1.0 Kgf |
| 四指彎曲狀態下的最大被動負載 | 30 Kg |
| 每根手指彎曲狀態下的最大被動負載 | 10 Kg |
| 每根手指伸展狀態下的最大被動負載 | 8 Kg |
| 手指觸控螢幕功能 | 支援 |
| 手指力回饋 | 支援 |
| 工作環境溫度 | -10 °C ~ +40 °C |
| 工作環境濕度 | 最大相對濕度 85% |
| 設計服務壽命 | 3 年 |
| 重量(包括手腕) | 640 g ± 5 g |
| 通訊介面 | UART/RS485/CAN |
| 波特率 | UART: 9600/19200/38400/57600/115200/230400/460800/921600; RS485: 9600/19200/38400/57600/115200/230400/460800; CAN: 1M |
| 支援的協議 | UART: SerialCtrl, ModBus-RTU; RS485: SerialCtrl, ModBus-RTU; CAN: SerialCtrl |
| 材料 | 鋁合金; 鋅合金; 不銹鋼; 矽膠; 塑料 |
應用
- 機器人末端執行器和類人機器人。
- 教育和研究設備。
- 仿生義肢。
- 工業自動化和AGV系統。
如需訂購協助、整合指導或技術支持,請聯繫[email protected] or或訪問https://rcdrone.top/。
手冊
詳情

ROHand通過內置PID馬達控制提供±1mm的定位精度,並提供六個主動自由度以模擬人手動作,如夾持和抓取。非常適合人形機器人、機器人末端執行器、檢查系統、智能仿生義肢以及教育或研究應用,其設計支持在複雜任務中的多功能、精確操作。
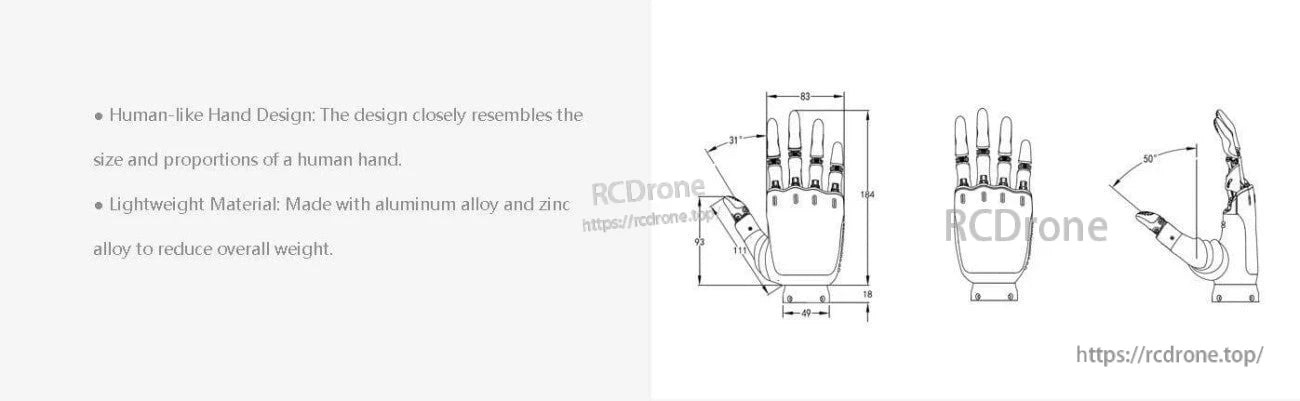
類人靈巧機器人手,採用輕量鋁鋅合金結構和精確尺寸。

OYMotion ROH-AP001靈巧機器手模仿人類比例,具備關節手指和傳感器,實現精確的實物大小機器操作。
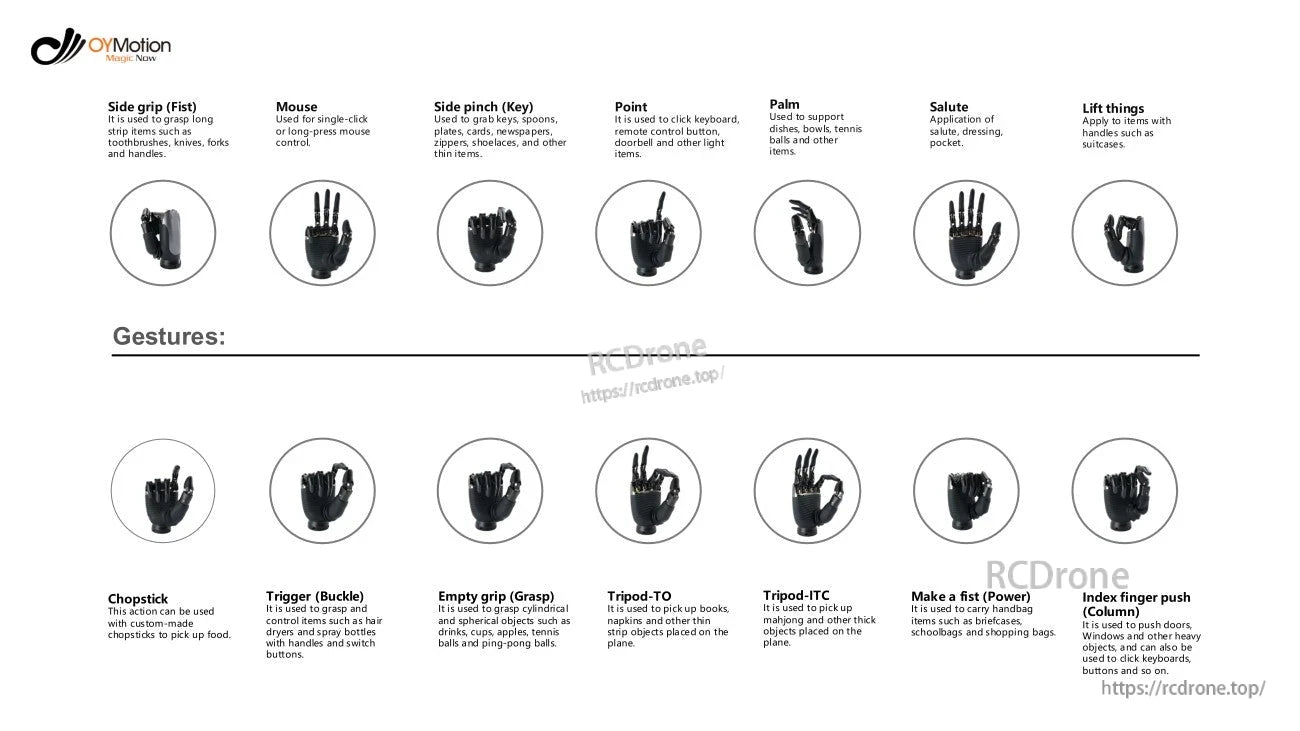
OYMotion機器手執行14種精確手勢—如抓握、指向和提起—以處理日常任務,如使用筷子、提包或點擊鍵盤,展示了先進的靈巧性和實用性。

OYMotion機器手提供電動手指、可折疊設計、柔軟墊片、動力拇指、矽膠手套、內建驅動、蜂鳴器、自訂手腕和RS485連接器,以實現靈巧的自然抓握。
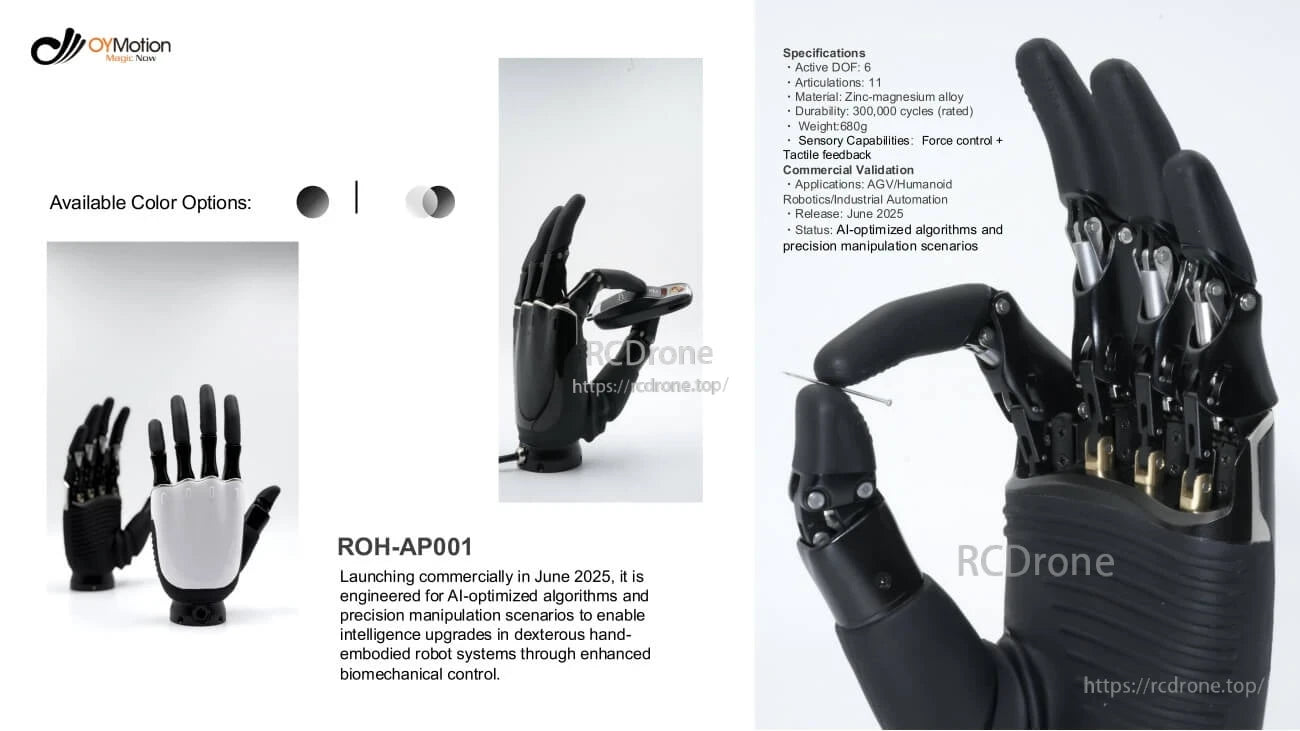
OYMotion ROH-AP001靈巧機器手擁有6個活動自由度、11個關節、鋅鎂合金結構、300k次耐用性,重680克,並提供力/觸覺反饋以應對AI和精密任務—將於2025年6月推出。

OYMotion ROH-AP001 機器手具有電動手指、動力拇指、矽膠手套和內建驅動裝置。由鋁、鋅、鋼、矽膠和塑料製成,包含蜂鳴器、自訂手腕、RS485 協議、可折疊設計和壓力彈簧。
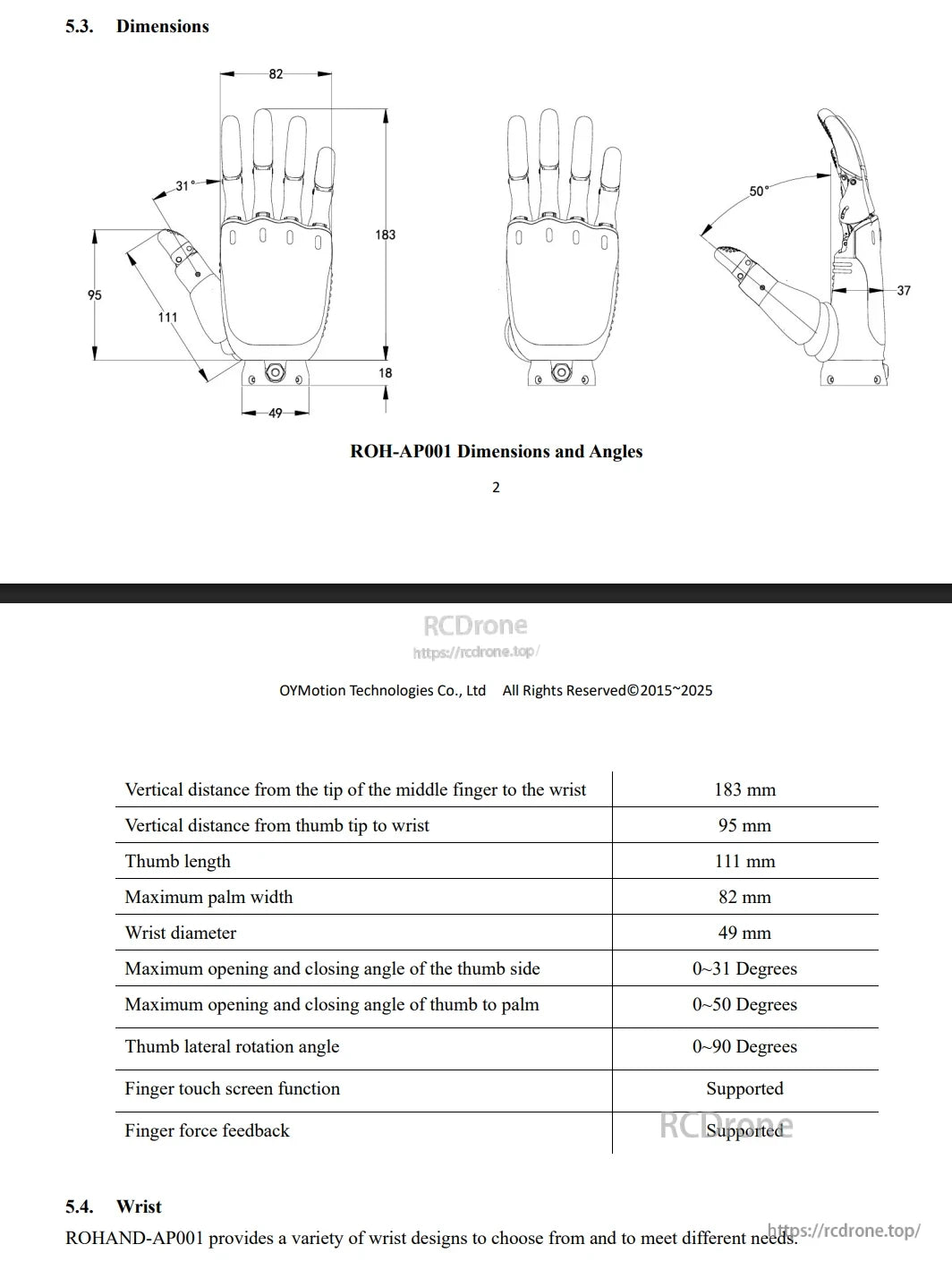
ROH-AP001 機器手的尺寸包括 183mm 手指到手腕的高度、95mm 拇指到手腕的距離、111mm 拇指長度、82mm 手掌寬度、49mm 手腕直徑。拇指角度:0-31° 側面、0-50° 到手掌、0-90° 旋轉。支持觸控螢幕和力回饋。
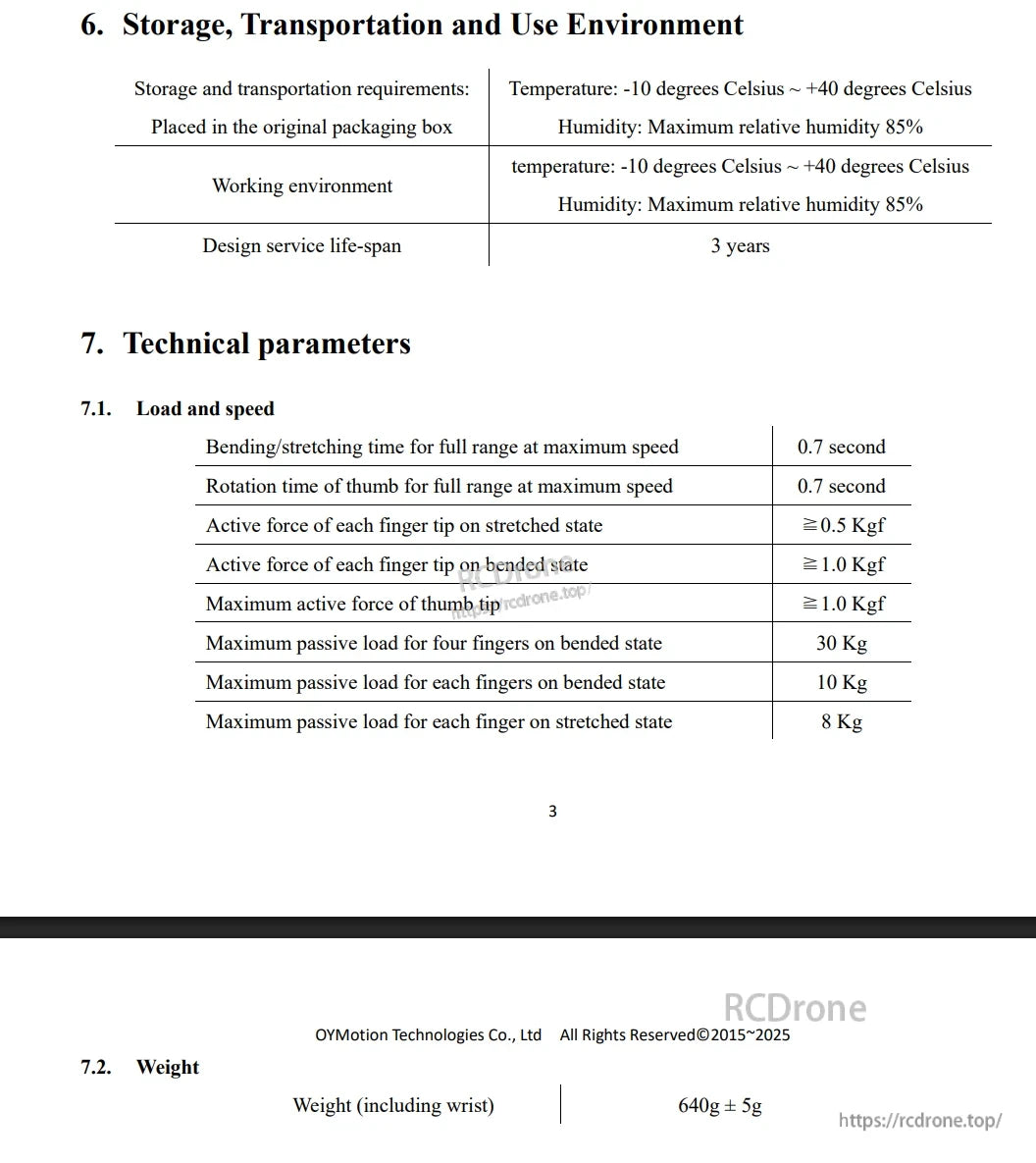
OYMotion ROH-AP001 機器手的操作範圍為 -10°C 到 +40°C,最大濕度 85%。設計壽命:3 年。重量:640g ±5g。手指的主動力量 ≥0.5–1.0 Kgf;四根手指的被動負載可達 30kg。





