RCDrone T5001-10 & TS5001-10 1N.m 無刷伺服關節馬達 FOC 雙編碼器 RS485/CAN 1:10 減速機器人伺服驅動器
RCDrone T5001-10 & TS5001-10 1N.m 無刷伺服關節馬達 FOC 雙編碼器 RS485/CAN 1:10 減速機器人伺服驅動器
RCDrone
定價
$185.00 USD
定價
售價
$185.00 USD
單價
每
已包含稅額。
結帳時計算運費。
無法載入取貨服務供應情況
概述
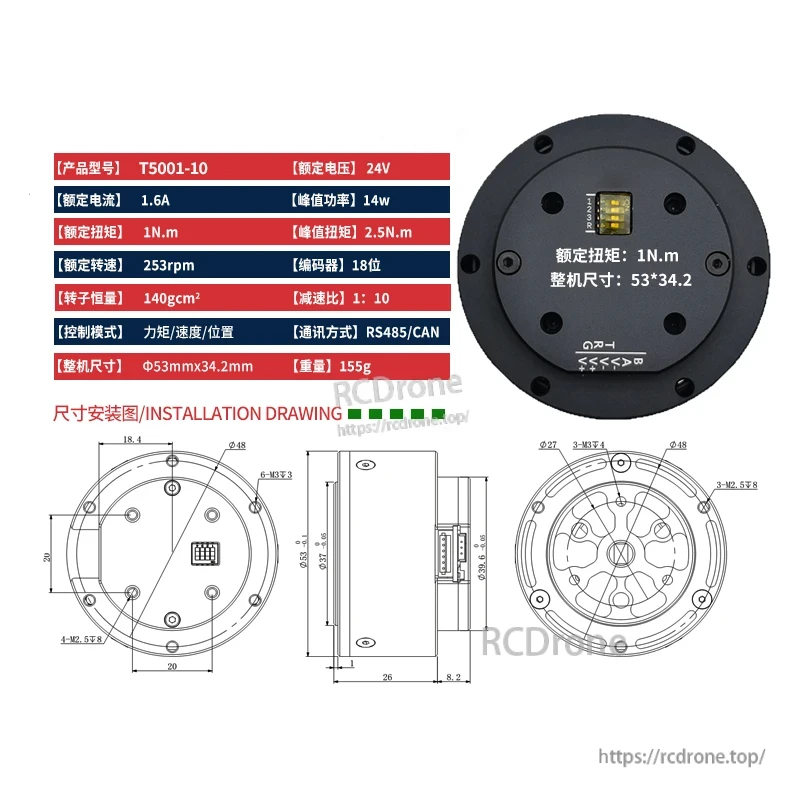
RCDrone T5001-10 和 TS5001-10 是緊湊型、高性能的 MIT 驅動無刷伺服關節模組馬達,專為先進的機器人應用而設計。具備 1N·m 額定扭矩、2.5N·m 峰值扭矩、253–255 rpm 額定速度,以及 1:10 行星齒輪減速,這些伺服模組在輕量化的外形中提供 高功率、大扭矩和高精度。配備 18位元 (T5001-10) 或 18位元 + 14位元 (TS5001-10) 雙絕對編碼器,它們提供精確的位置反饋,並具備 一次性校準和零點設定。通訊支持 RS485/CAN 接口,確保機器人控制系統的可靠數據傳輸。
主要特點
-
高精度反饋 – 18位元或雙編碼器設計,實現精確的運動控制。
-
高扭矩密度 – 1N·m 額定扭矩,2.5N·m 峰值扭矩,緊湊的Φ53mm外殼。
-
FOC控制 – 以場為導向的控制,實現平穩、高效的運行。
-
多種控制模式 – 扭矩、速度和位置控制。
-
工業級通信 – 支持RS485/CAN和UART,便於靈活集成。
-
耐用設計 – 專為機器人設計,確保長期運行的穩定性。
-
輕巧緊湊 – 僅重155克(T5001-10)或183克(TS5001-10),非常適合空間有限的設計。
技術規格
| 型號 | T5001-10 | TS5001-10 |
|---|---|---|
| 額定電壓 | 24V | 24V |
| 額定電流 | 1.6A | 1.6A |
| 峰值功率 | 14W | 14W |
| 額定扭矩 | 1N·m | 1N·m |
| 峰值扭矩 | 2.5N·m | 2.5N·m |
| 額定速度 | 253rpm | 255rpm |
| 編碼器 | 18位元絕對 | 18位元 + 14位元絕對 |
| 轉子慣性 | 140g·cm² | 140g·cm² |
| 齒輪比 | 1:10 行星齒輪 | 1:10 行星齒輪 |
| 控制模式 | 扭矩 / 速度 / 位置 | 扭矩 / 速度 / 位置 |
| 通訊 | RS485 / CAN | RS485 / CAN |
| 尺寸 | Φ53 × 34.2mm | Φ53 × 36mm |
| 重量 | 155g | 183g |
介面定義
| 引腳 | 功能 |
|---|---|
| A/H | RS485-A 或 CAN-H |
| B/L | RS485-B 或 CAN-L |
| V- | 負電源 |
| V+ | 正電源 |
| T | UART 發射器 |
| R | UART 接收器 |
| G | 信號接地 |
應用
-
腿式機器人 – 為四足和人形機器人提供穩定的運動控制。
-
工業機器人 – 用於機器手臂的高精度伺服關節。
-
巡邏機器人 – 用於自主移動平台的可靠驅動單元。
-
醫療機器人 – 輕量且精確,適用於外骨骼和康復設備。
詳情