




ROBOTERA XHAND 1 機械手 - 12自由度,270° 觸覺指尖,80N 抓力,25公斤舉重,支援 EtherCAT/RS485,兼容 ROS
ROBOTERA XHAND 1 機械手 - 12自由度,270° 觸覺指尖,80N 抓力,25公斤舉重,支援 EtherCAT/RS485,兼容 ROS
ROBOTERA
無法載入取貨服務供應情況
概述
ROBOTERA XHAND 1 是一款五指機器手,擁有完整的直接驅動關節模組和 12 個主動自由度。該手的尺寸與人手相當(191 毫米 x 94 毫米 x 47 毫米),設計用於靈巧操作,具備高解析度觸覺感應、強大的抓握力以及適合開發者的介面,便於機器人研究和整合。
主要特點
- 完整的直接驅動架構,集成了齒輪驅動、力控關節模組(拇指 3 個;其他四根手指 9 個)。
- 12 個完全主動的自由度;食指橫向擺動範圍為 +/-15°,可進行複雜的手內操作。
- 高抓握性能:指尖力量 15N;最大抓握力 80N;最大抓取重量可達 25 公斤(掌心向上)和 16 公斤(掌心向左)。
- 高速度驅動,支持 >2Hz 開合重複;已證明手指點擊速度可達 10 CPS(每秒點擊次數)。
- 270° 指尖觸覺覆蓋,配備五個三維觸覺陣列傳感器;每個指尖的整隻手解析度為 12x10 x 5。
- 三維力感測,包括切向力(X 和 Y);指尖重複定位精度 +/-0.20 毫米。
- 可反向驅動,阻尼 <= 0.1 Nm;電流迴路力控制和力-位置控制以實現柔性互動。
- 開發者友好的連接性:EtherCAT 和 RS485(USB);與 ROS1/ROS2、Ubuntu(Linux)、x86 和 ARM 架構、TwinCAT 以及常見的機器手臂(包括 xARM、Realman、UR)兼容。
- 耐用性評級為 1,000,000 次無負載抓取循環;工作溫度 -20°C ~ 60°C。
如需查詢、整合支持或批量購買,請聯繫 [email protected] or 訪問 https://rcdrone.top/。
規格
| 參數 | 數值 |
|---|---|
| 重量 | 1100 克 |
| 尺寸 (長 x 寬 x 高) | 191 毫米 x 94 毫米 x 47 毫米 (成人手掌的大小) |
| 主動自由度 (總計) | 12 |
| 被動自由度 (總計) | 0 |
| 自由度分配 | 拇指 x 3; 食指 x 3; 中指 x 2; 無名指 x 2; 小指 x 2 |
| 拇指驅動/傳動 | 3個齒輪驅動的力控關節模組 |
| 四指驅動/傳動 | 9個齒輪驅動的力控關節模組 |
| 指尖配置 | 圓形或圓潤的指尖 |
| 側向擺動 | -15°~+15° (食指) |
| 指尖重複定位精度 | +/− 0。20 mm |
| 控制模式 | 位置控制(低阻尼/高阻尼),電流迴路力控制,力-位置控制 |
| 指尖力量 | 15N |
| 最大握力(整隻手) | 80N |
| 最大抓取重量(手掌向左) | 16 Kg |
| 最大抓取重量(手掌向上) | 25 Kg |
| 拇指最遠對立 | 小指 |
| 開/關重複速度 | >2Hz |
| 反向驅動阻尼(可反向驅動) | <= 0.1 Nm |
| 觸覺覆蓋 | 270° 五指指尖包圍 |
| 觸覺傳感器數量 | 五個270°三維包圍觸覺陣列傳感器位於五個指尖 |
| 觸覺解析度(整隻手) | 12x10(每個指尖270°包圍)x 5 |
| 觸覺感知尺寸 | 三維力感知(包括切向力X和Y) |
| 整隻手控制頻率 | 83Hz |
| 通信速率 | EtherCAT: 100MHz; RS485: 3MHz |
| 感知參數 | 指尖:120個三維輪廓陣列力;關節:位置、速度、溫度、電流(扭矩) |
| 控制參數 | 關節位置;關節扭矩;關節剛度係數;關節阻尼係數 |
| 無負載抓取循環 | 1,000,000 循環 |
| 操作溫度範圍 | -20°C ~ 60°C |
| 工作電壓 | 24V ~ 72V |
| 靜態電流 | 0.15A @48V, 7W |
| 最大電流 | 2.5A @48V, 120W |
| 通訊介面 | RS485 (USB), EtherCAT |
應用
- 遠程操作:支持MR和手套遠程操作;Vision Pro遠程操作;Manus手套;Pico/Meta Quest。
- 機器臂和人形機器人整合:與xARM、Realman、UR及其他機器臂兼容。
- 研究與模擬:精確的URDF,觸覺感應模擬;適合使用Isaac Gym和Mujoco進行強化學習。
- 人機互動及人類工具的操作,具備柔性力控制。
手冊
Xhand_adapter.stp
MH2.25_right_stp.zip
MH2.25_left_stp.zip
XHand_Control_ROS_Documentation.pdf
X-Hand_1_Product_Manual_1.0.pdf
X-Hand_1_User_Quick_Start_Instructions_1.0.pdf
詳細

ROBOTERA XHAND1 機械手,具備全直驅動,提供真正的自由度和先進的靈活性。

ROBOTERA 的 XHAND1:具有人形五指的手,擁有 12 個自由度,每個指尖配備 270° 觸覺感應器,80N 握力,25kg 負載能力。設計用於複雜任務和工具操作。

XHAND 1:首款每個關節配備直驅模組的靈巧手。具備高功率無線電動馬達、低阻尼減速器、精密編碼器,以及自研的集成關節模組,實現先進的機器人操作。
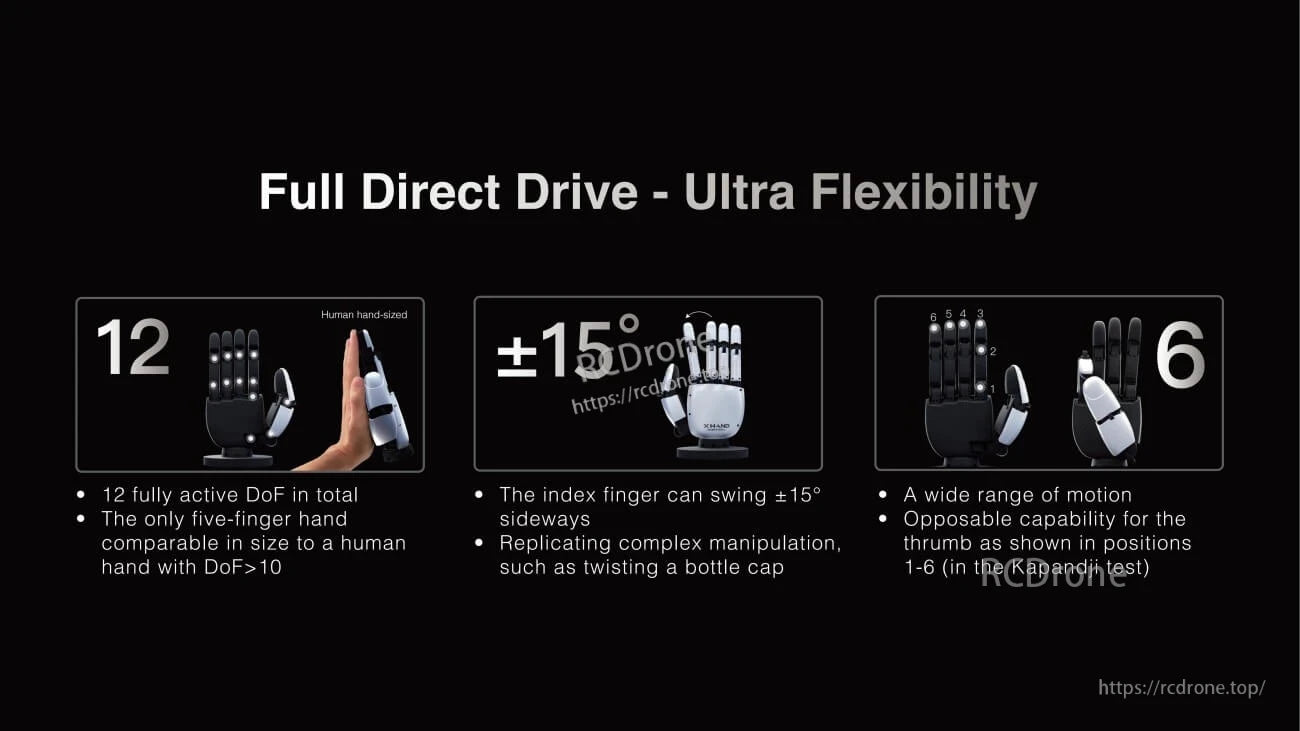
ROBOTERA XHAND 1 是一款超靈活的人形機械手,擁有 12 個主動自由度。其食指可左右擺動 ±15° 以應對複雜任務,拇指則提供六個對立位置以便於多樣化操作。

ROBOTERA XHAND 1:25kg 負載,80N 握力,全直驅,超越類似的連桿/腱驅動解決方案。

全直驅機器手達到 10 CPS,齒輪驅動速度,扭矩超過 1 Nm,超越連桿和腱系統,提供卓越的遊戲性能。

ROBOTERA XHAND 1 擁有 270° 指尖傳感器,具備 >100 點和 0.05 N 精度,用於 3D 力、觸覺和溫度感測,確保卓越的握持性能。
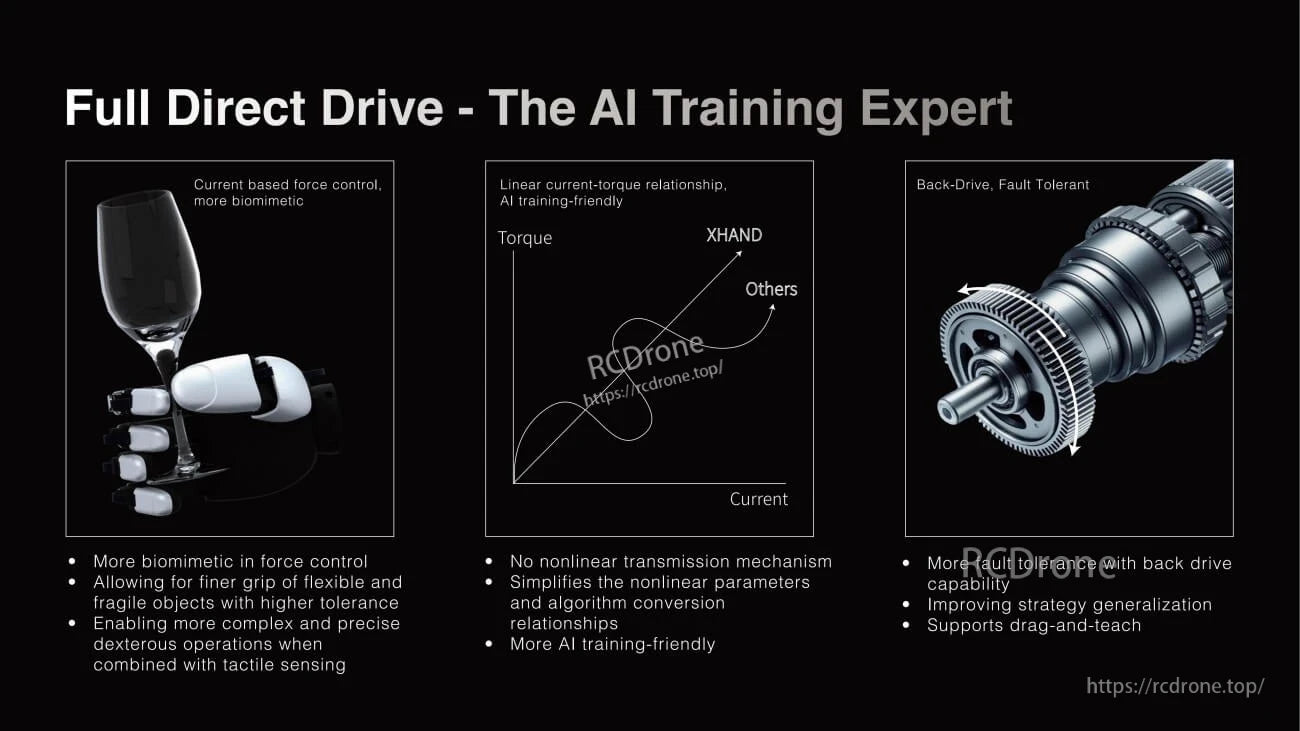
ROBOTERA XHAND 1 提供仿生力控制,線性扭矩-電流響應以進行 AI 訓練,並具備反驅動故障容忍—實現精確處理、簡化算法、拖放教學支持和改進的策略泛化。
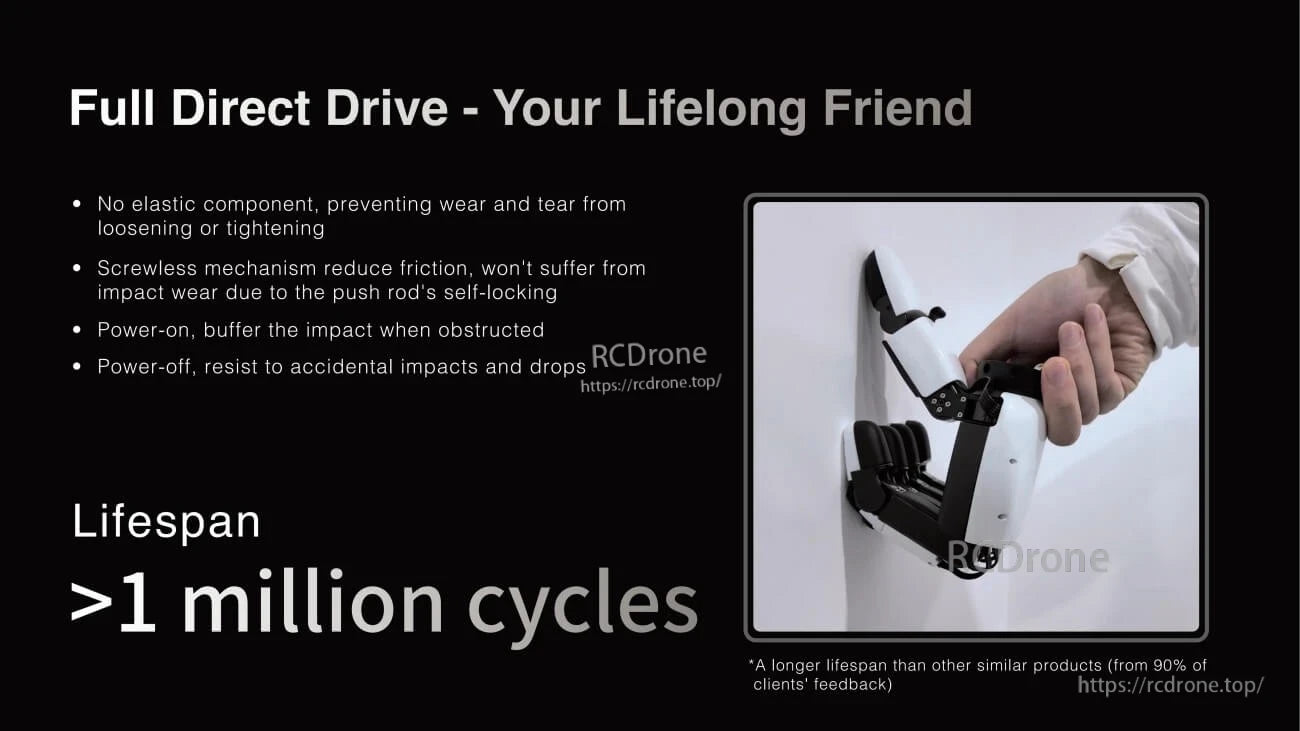
全直驅機器人手提供耐用性,無彈性部件或螺絲,開機時具備衝擊緩衝,關機時具備抗摔能力,壽命超過一百萬次循環—根據客戶反饋,表現優於類似產品。

ROBOTERA XHAND 1 支援 MR 和手套遠程操作,與 ROS1/ROS2 和 x64/ARM 上的 Ubuntu 兼容。具備 EtherCAT/TwinCAT/RS485 以便與 xARM、Realman、UR 機器手臂整合。提供精確的 URDF 建模和觸覺感測模擬。設計適合開發者友好的機器人應用,具備跨平台靈活性和先進的控制協議。
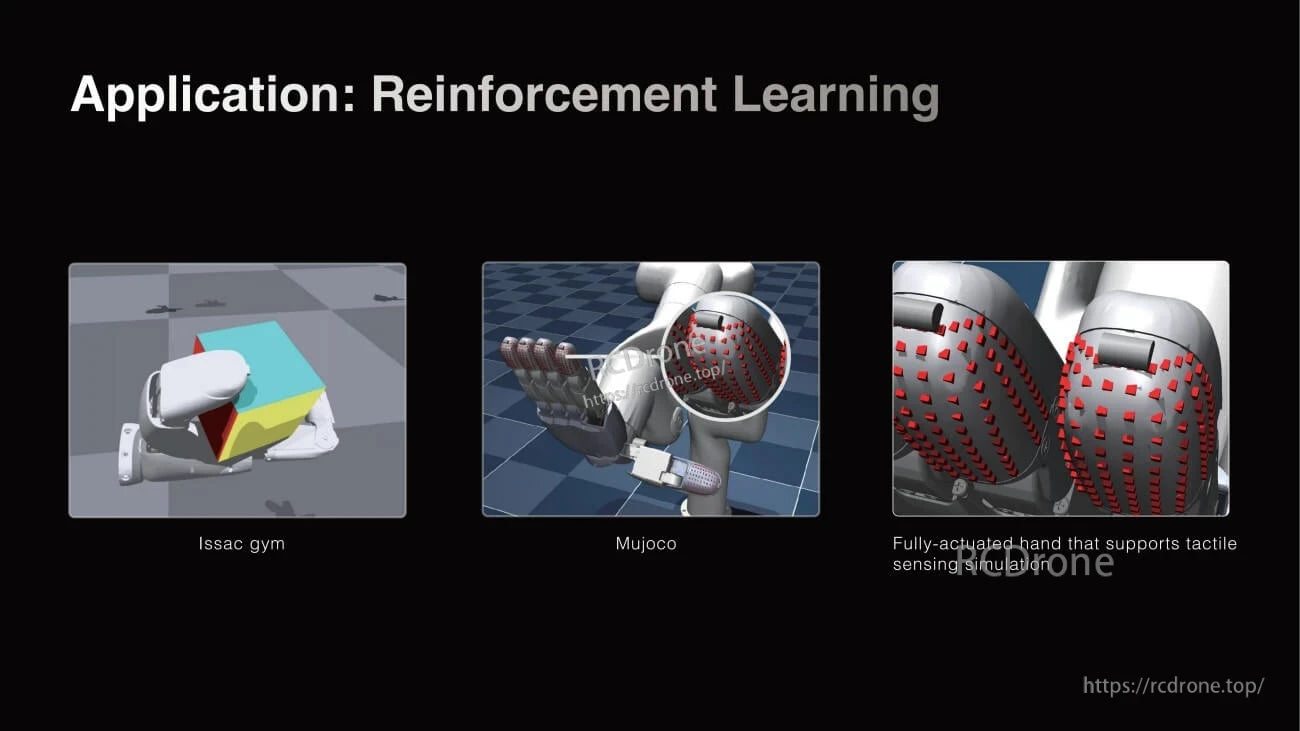
強化學習應用:Issac gym、Mujoco,以及具觸覺感測模擬的全驅動手,用於先進的機器人控制和訓練環境。
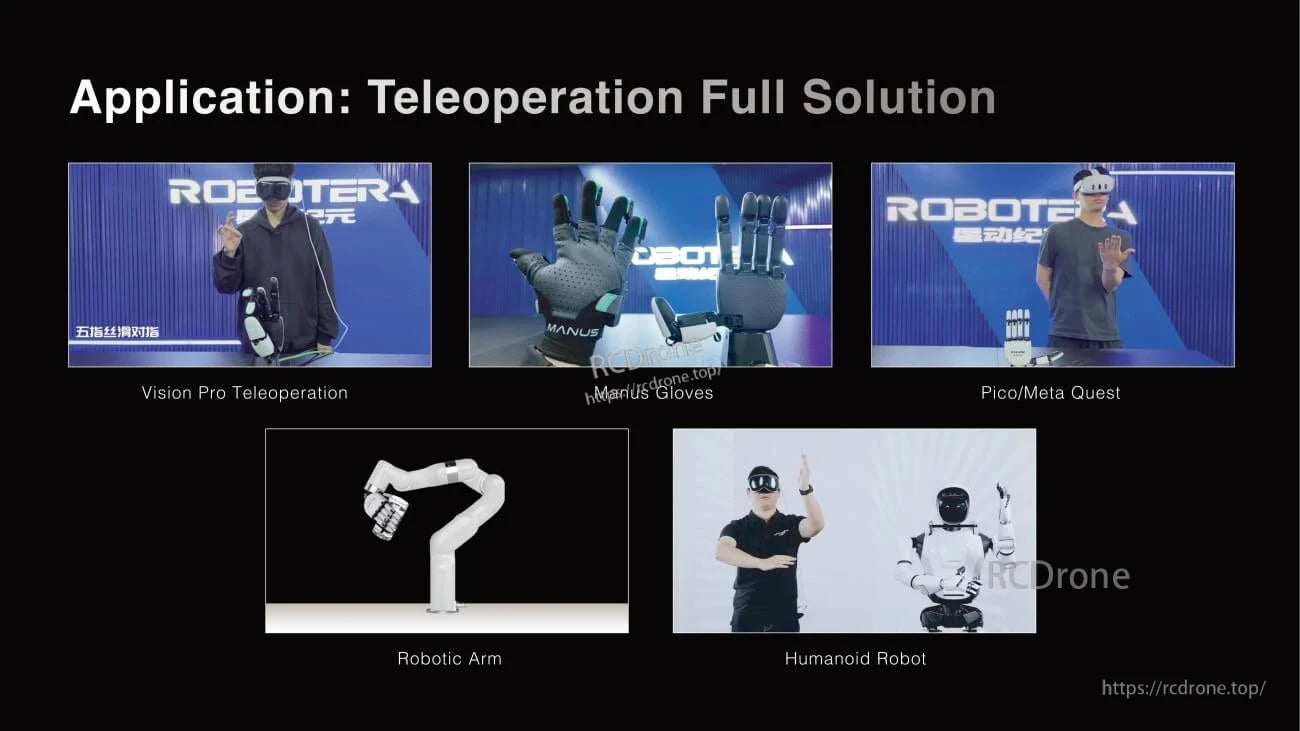
遠程操作完整解決方案,包含 Vision Pro、Manus 手套、Pico/Meta Quest、機械臂和人形機器人,以實現先進的遠程控制。
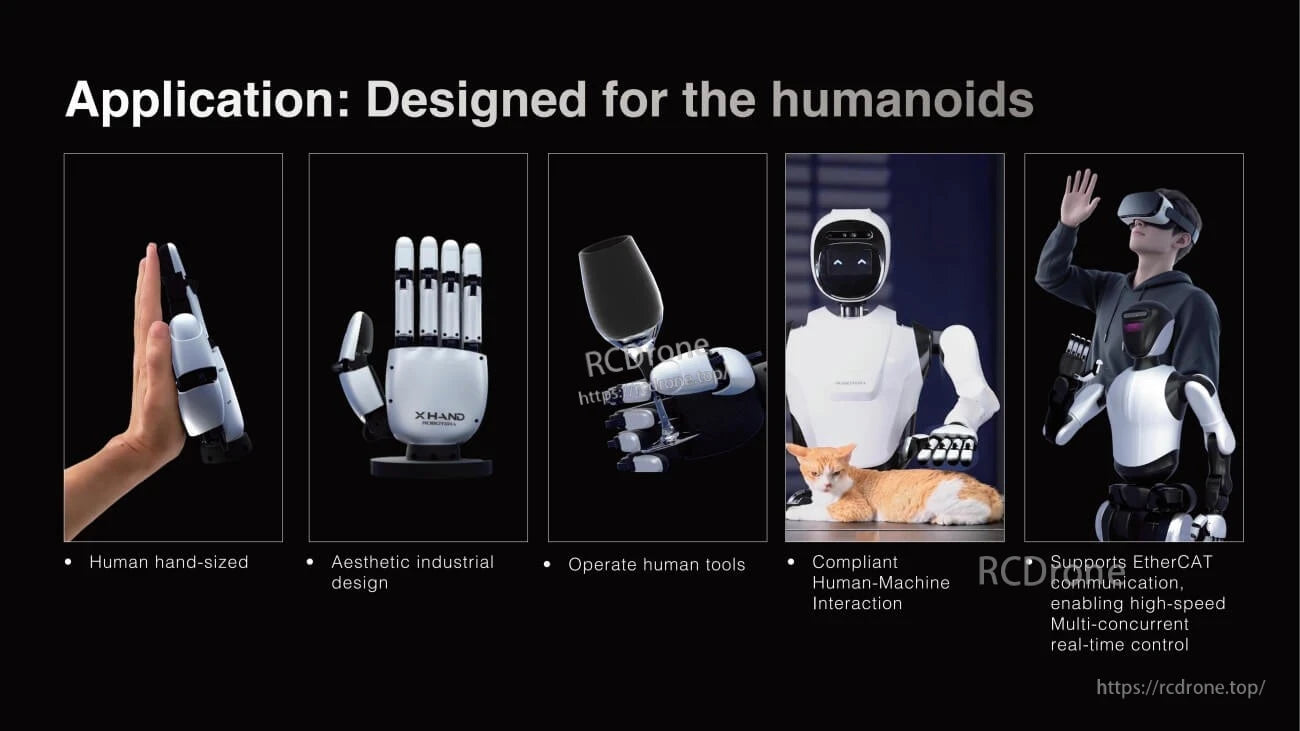
人類大小的機器人手,具有美學設計,能操作工具,實現合規互動,支持 EtherCAT 以進行實時控制。
Related Collections




