


















Yahboom ROSMASTER M3 ROS2 AI大型模型機器人車,配備麥克納姆輪,適用於Orin Nano/NX SUPER、RDK X5、Pi 5
Yahboom ROSMASTER M3 ROS2 AI大型模型機器人車,配備麥克納姆輪,適用於Orin Nano/NX SUPER、RDK X5、Pi 5
Yahboom
無法載入取貨服務供應情況
概述
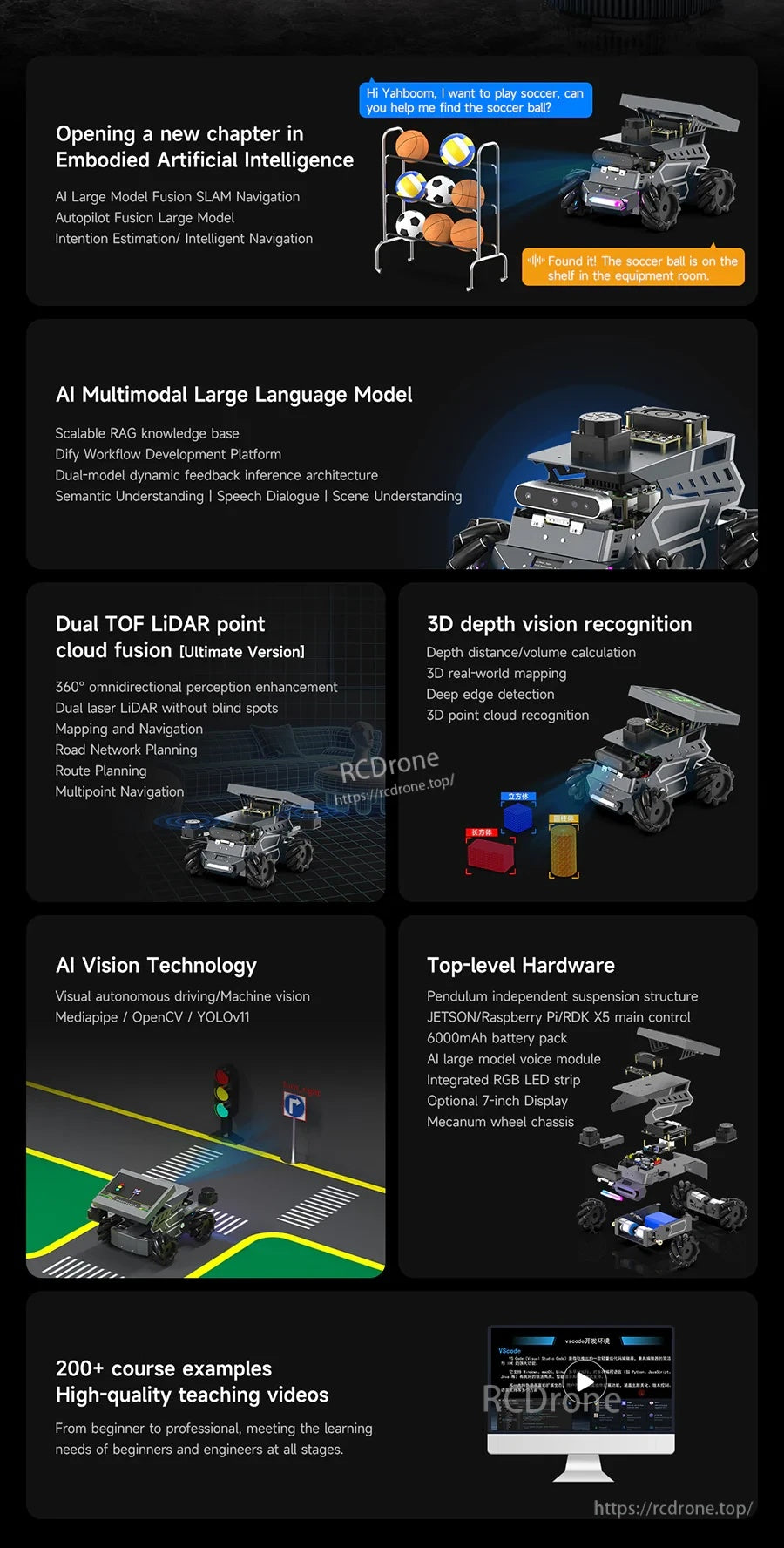
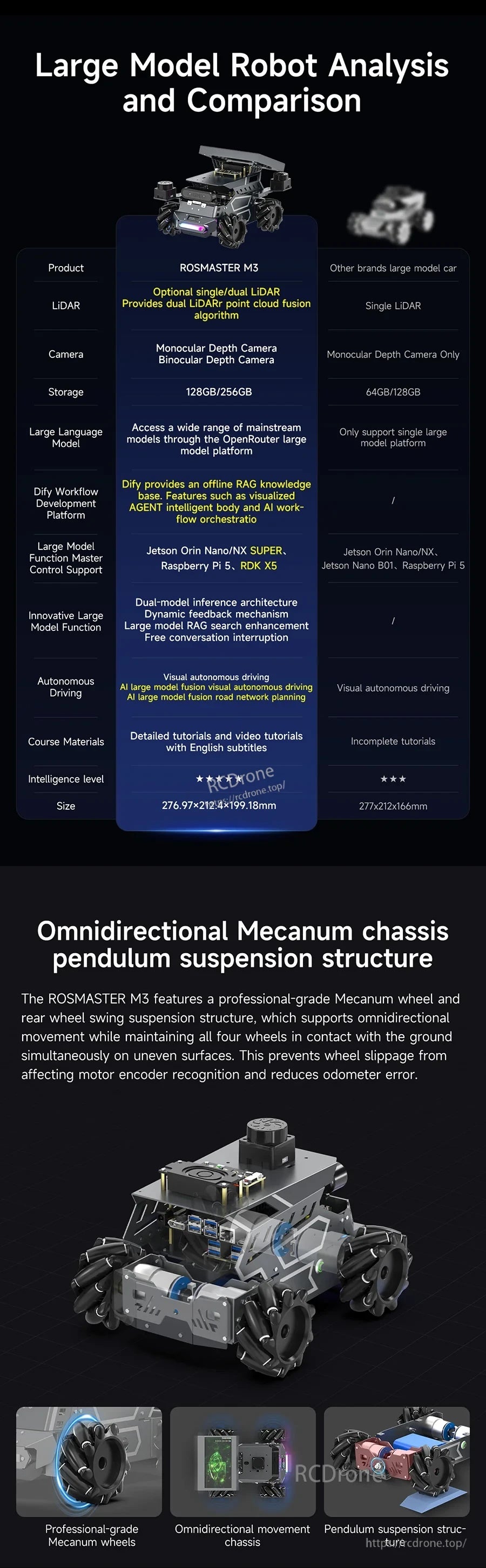
Yahboom ROSMASTER M3 是一款為 Jetson Orin Nano/Orin NX SUPER、Raspberry Pi 5 和 RDK X5 設計的 ROS2 機器人車平台。它集成了多模態 AI(文本/視覺/語音)與 SLAM 導航,並具有麥克納姆輪底盤和擺式獨立懸掛結構,可實現 360° 全方位移動。根據配置,它支持可選的單/雙 TOF LiDAR,並使用 DaBai DCW2 深度相機進行 3D 視覺應用。
主要特點
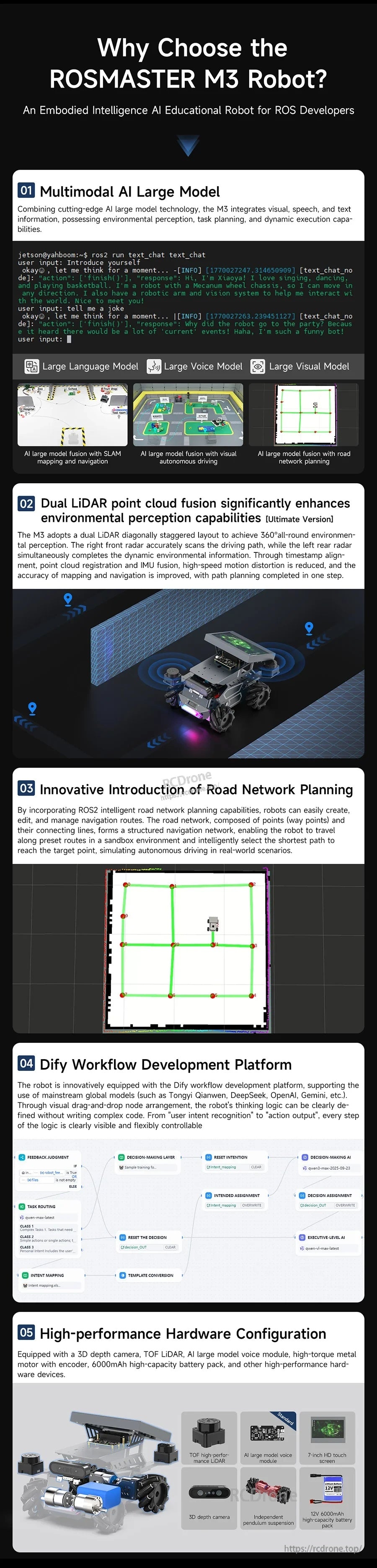
- AI多模態大型語言模型應用:語義理解、語音對話和場景理解
- Dify工作流程開發平台支持開發和部署大型模型工作流程
- 雙模型推理架構,支持動態反饋推理和對話中斷
- LiDAR + 編碼器 + IMU(陀螺儀)融合,用於地圖繪製和導航;支持多種地圖繪製算法
- DaBai DCW2 深度相機:深度圖像 + 點雲,用於3D視覺地圖繪製、測量和識別
- 專業級麥克納姆輪 + 擺式懸掛,減少車輪打滑對編碼器識別的影響,降低里程計誤差
- 集成RGB前燈/LED燈帶,具有流動、呼吸和跑馬燈光效;顏色/亮度可自定義
- AI視覺堆疊支持:OpenCV / MediaPipe / YOLOv11;包括手勢識別、QR碼識別、姿勢估計、圖像分割和物體檢測
- 多機器人編隊和互聯控制:同一地圖上的多機器人導航和動態障礙物避讓;多個機器人由一個主機控制
規格
| 機器人尺寸 | 276.97 x 212.4 x 199.18 mm |
| 底盤 | 麥克納姆輪底盤(全方位移動) |
| 懸掛系統 | 擺式獨立懸掛結構 |
| 深度攝像頭 | DaBai DCW2 深度攝像頭 |
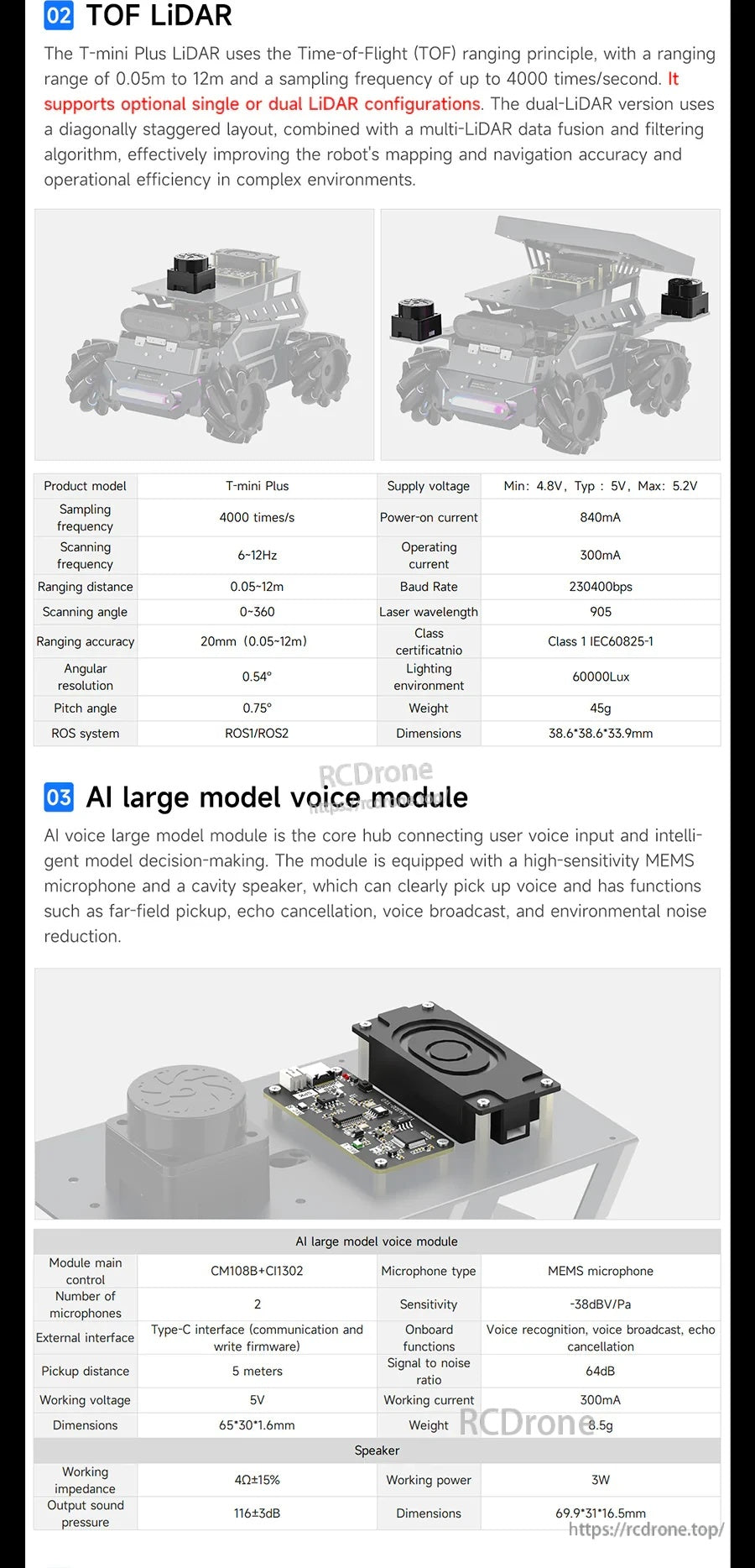
| LiDAR | T-MINI PLUS LiDAR(可選單/雙TOF LiDAR;雙點雲融合適用於終極版) |
| 照明 | 集成RGB前燈/LED燈條 |
| 電池 | 6000mAh 電池組 |
| 可選顯示器 | 7英寸顯示器(可選;取決於版本) |
| 操作系統 / ROS(由控制器決定) | Raspberry Pi OS + Docker + ROS2 Humble; Ubuntu 22.04 + ROS2 Humble; Ubuntu 22.04 LTS + ROS2 Humble |
| 存儲(根據配置) | 128GB / 256GB (e.g. , 128GB TF卡; 256GB SSD) |
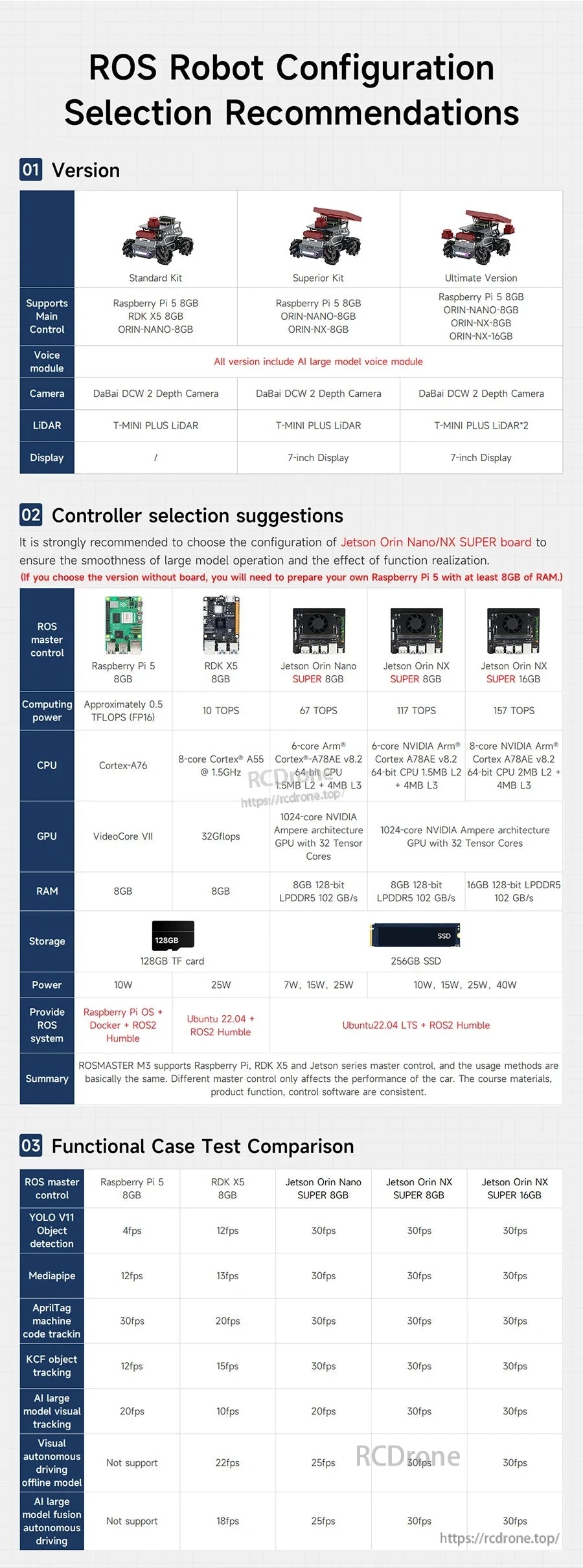
版本選項 (配置選擇)
| 項目 | 標準套件 | 高級套件 | 終極版本 |
|---|---|---|---|
| 支持的主控 | Raspberry Pi 5 8GB; RDK X5 8GB; ORIN-NANO-8GB | Raspberry Pi 5 8GB; ORIN-NANO-8GB; ORIN-NX-8GB | Raspberry Pi 5 8GB; ORIN-NANO-8GB; ORIN-NX-8GB; ORIN-NX-16GB |
| 語音模組 | 所有版本均包含AI大型模型語音模組 | ||
| 攝像頭 | DaBai DCW2 深度攝像頭 | DaBai DCW2 深度攝像頭 | DaBai DCW2 深度攝像頭 |
| LiDAR | T-MINI PLUS LiDAR | T-MINI PLUS LiDAR | T-MINI PLUS LiDAR *2 |
| 顯示器 | / | 7英寸顯示器 | 7英寸顯示屏 |
注意: 只有終極版配備雙T-mini Plus LiDAR。
控制器選擇建議(參考)
為了提高大型模型操作的流暢性和功能效果,建議選擇 Jetson Orin Nano/NX SUPER。如果選擇無板版本,請準備至少 8GB RAM 的 Raspberry Pi 5。
| 控制器 | 計算能力 | CPU | GPU | RAM | 存儲 | 功率 | 提供的 ROS 系統 |
|---|---|---|---|---|---|---|---|
| Raspberry Pi 5 8GB | 約 0.5 TFLOPS (FP16) | Cortex-A76 | VideoCore VII | 8GB | 128GB TF 卡 | 10W | Raspberry Pi OS + Docker + ROS2 Humble |
| RDK X5 8GB | 10 TOPS | 8核 Cortex-A55 @ 1.5GHz | 32Gflops | 8GB | / | 25W | Ubuntu 22.04 + ROS2 Humble |
| Jetson Orin Nano SUPER 8GB | 67 TOPS | 6核 Arm Cortex-A78AE v8.2 64位 CPU 1.5MB L2 + 4MB L3 |
1024核 NVIDIA Ampere 架構 GPU,配備 32 個 Tensor 核心 | 8GB 128位 LPDDR5 102 GB/s | 256GB SSD | 7W, 15W, 25W | Ubuntu 22.04 LTS + ROS2 Humble |
| Jetson Orin NX SUPER 8GB | 117 TOPS | 6核 NVIDIA Arm Cortex-A78AE v8.2 64位 CPU 1.5MB L2 + 4MB L3 |
1024核 NVIDIA Ampere 架構 GPU,配備 32 個 Tensor 核心 | 8GB 128位 LPDDR5 102 GB/s | 256GB SSD | 10W, 15W, 25W, 40W | Ubuntu 22.04 LTS + ROS2 Humble |
| Jetson Orin NX SUPER 16GB | 157 TOPS | 8核 NVIDIA Arm Cortex-A78AE v8.2 64位 CPU 2MB L2 + 4MB L3 |
1024核心 NVIDIA Ampere 架構 GPU,配備 32 個 Tensor 核心 | 16GB 128位元 LPDDR5 102 GB/s | 256GB SSD | 10W, 15W, 25W, 40W | Ubuntu 22.04 LTS + ROS2 Humble |
性能參考(功能案例測試比較)
| 測試項目 | Raspberry Pi 5 8GB | RDK X5 8GB | Orin Nano SUPER 8GB | Orin NX SUPER 8GB | Orin NX SUPER 16GB |
|---|---|---|---|---|---|
| YOLO V11 物體檢測 | 4fps | 12fps | 30fps | 30fps | 30fps |
| Mediapipe | 12fps | 13fps | 30fps | 30fps | 30fps |
| AprilTag 機器碼追蹤 | 30fps | 20fps | 30fps | 30fps | 30fps |
| KCF 物體追蹤 | 12fps | 15fps | 30fps | 30fps | 30fps |
| AI大型模型視覺追蹤 | 20fps | 10fps | 20fps | 30fps | 30fps |
| 視覺自動駕駛(離線模型) | 不支持 | 22fps | 25fps | 30fps | 30fps |
| AI大型模型融合自動駕駛 | 不支持 | 18fps | 25fps | 30fps | 30fps |
功能(LiDAR / 深度相機 / 視覺)
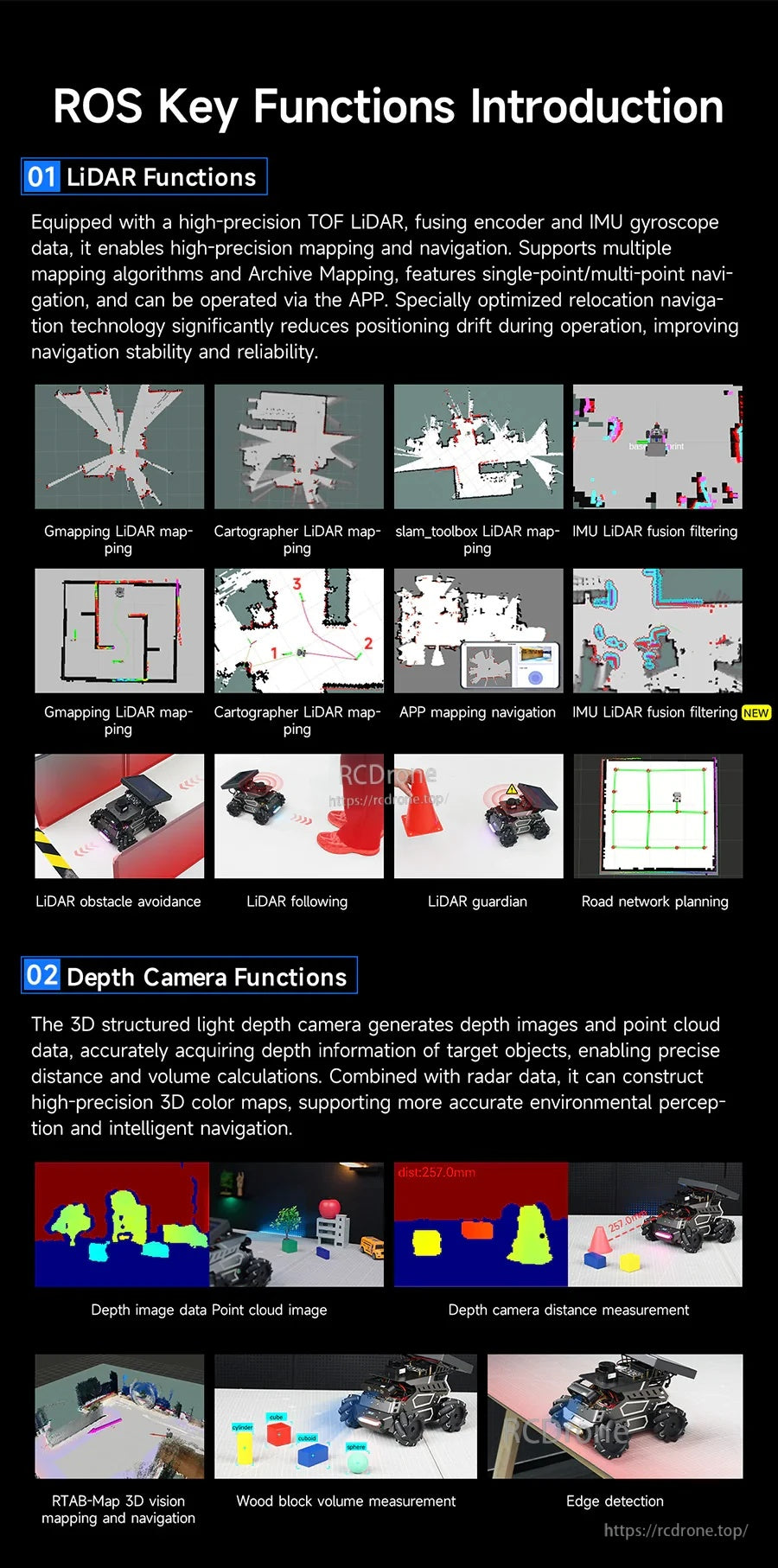
LiDAR功能
- 高精度TOF LiDAR與編碼器和IMU(陀螺儀)融合數據,用於高精度地圖繪製和導航
- 支持多種地圖繪製算法和存檔地圖
- 支持單點和多點導航;可通過APP操作
- 重定位導航技術減少定位漂移,提高導航穩定性和可靠性
- 顯示的映射和導航模式:Gmapping LiDAR 映射、Cartographer LiDAR 映射、slam_toolbox LiDAR 映射、IMU LiDAR 融合過濾、APP 映射導航
- 顯示的示例行為:LiDAR 障礙物避免、LiDAR 跟隨、LiDAR 守護、道路網絡規劃
深度相機功能
- 3D 結構光深度相機生成深度圖像和點雲數據
- 深度距離和體積計算;與雷達數據結合時構建高精度3D彩色地圖
- 顯示的示例應用:RTAB-Map 3D 視覺映射和導航、木塊體積測量、邊緣檢測、深度相機距離測量
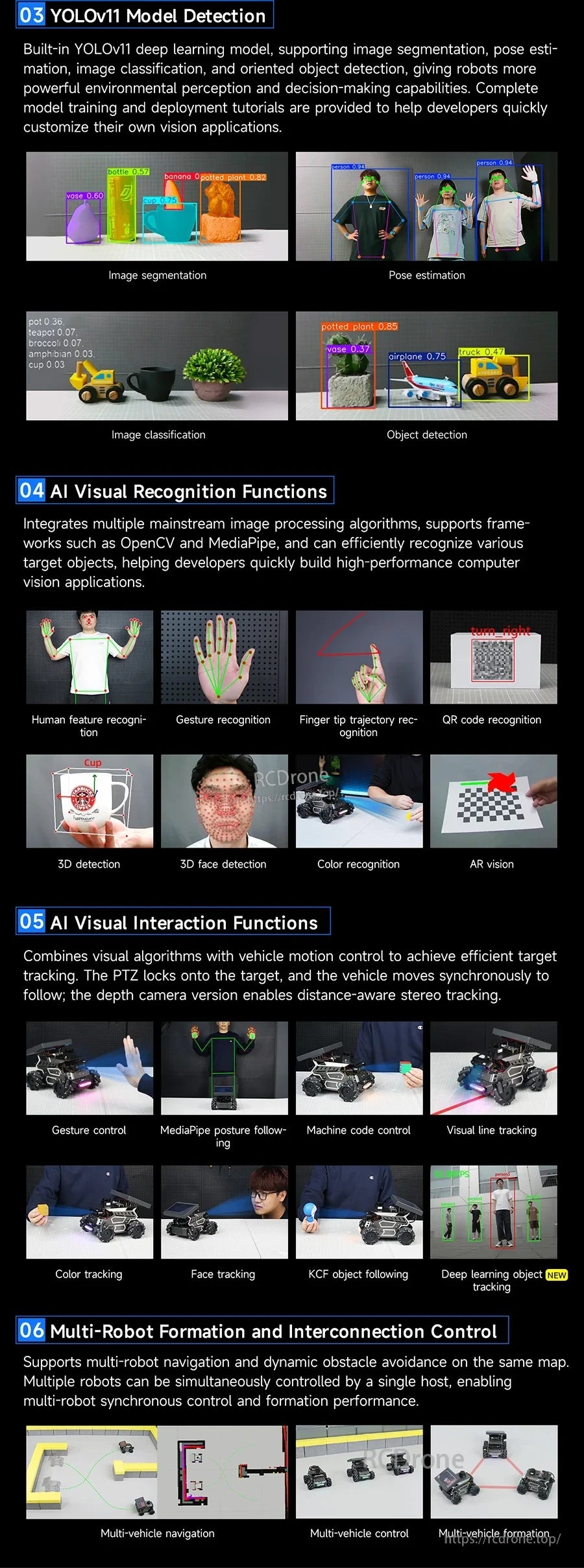
YOLOv11 模型檢測
- 支持圖像分割、姿態估計、圖像分類和定向物體檢測
AI 視覺識別 / 互動
- 支持的框架包括 OpenCV 和 MediaPipe
- 識別示例展示:人體特徵識別、手勢識別、指尖軌跡識別、QR 碼識別、3D 檢測、3D 人臉檢測、顏色識別、AR 視覺
- 互動示例展示:手勢控制、MediaPipe 姿勢跟隨、機器碼控制、視覺線跟踪、顏色跟踪、人臉跟踪、KCF 物體跟隨、深度學習物體跟踪
自動駕駛(沙盒)注意事項
自動駕駛沙盒測試支持:RDK X5、Orin Nano 和 Orin NX。樹莓派板顯示不支持此功能。演示的功能包括路標檢測、車道保持、自主停車和轉向決策。
應用
- SLAM 地圖構建和導航
- 道路網絡規劃、路線規劃和多點導航
- 場景理解、視覺跟隨、深度距離問答&和自主巡航演示
- 多機器人同步運動控制和編隊控制
教程
如需購買前的配置幫助(版本、控制器選擇和配件),請聯繫https://rcdrone.top/或發送電子郵件至[email protected].
詳情

認識 ROSMASTER M3:一個為多模態 AI 和 SLAM 導航而構建的 ROS2 準備就緒的機器人車平台,適用於流行的邊緣控制器。
多模態互動、3D感知和全向移動集成於一個平台。
Dify工作流程支持和多種映射選項有助於從演示轉向可部署的機器人應用。
通過比較感知傳感器、控制器兼容性和底盤性能來選擇合適的套件級別。

可選的單/雙TOF LiDAR和可編程RGB照明擴展導航和展示的使用案例。
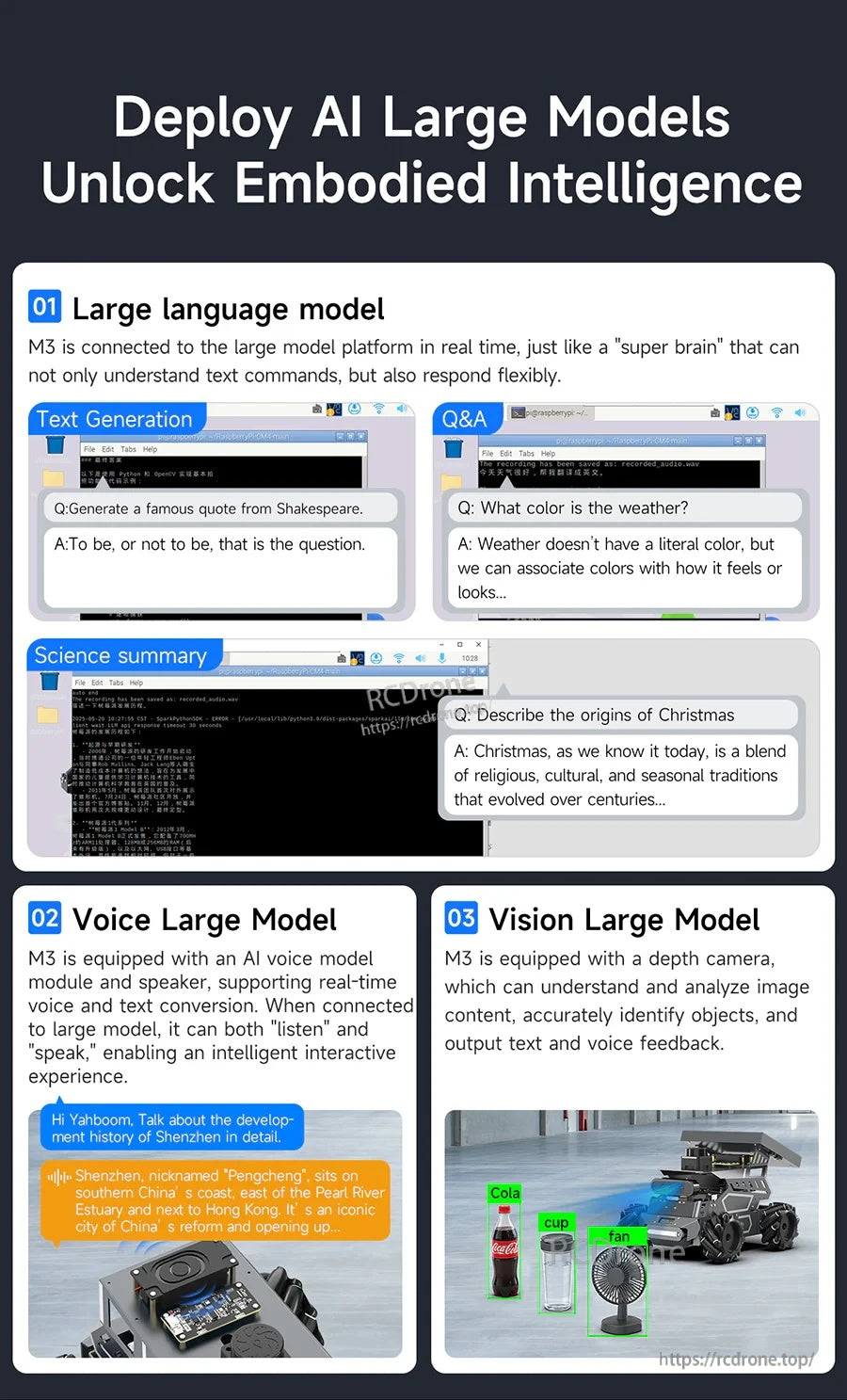
同時運行文本、語音和視覺模型,以獲得更豐富的語義理解和互動機器人。
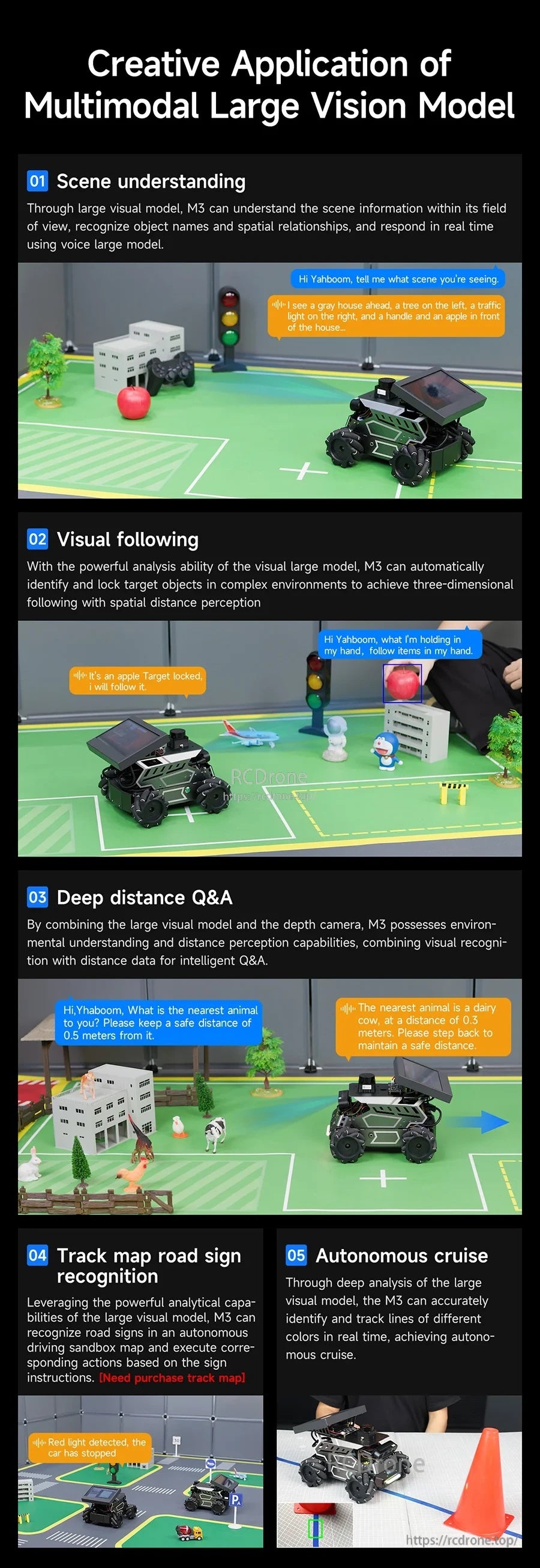
實用的視覺堆疊支持跟踪、識別和互動問答,適用於現實場景。
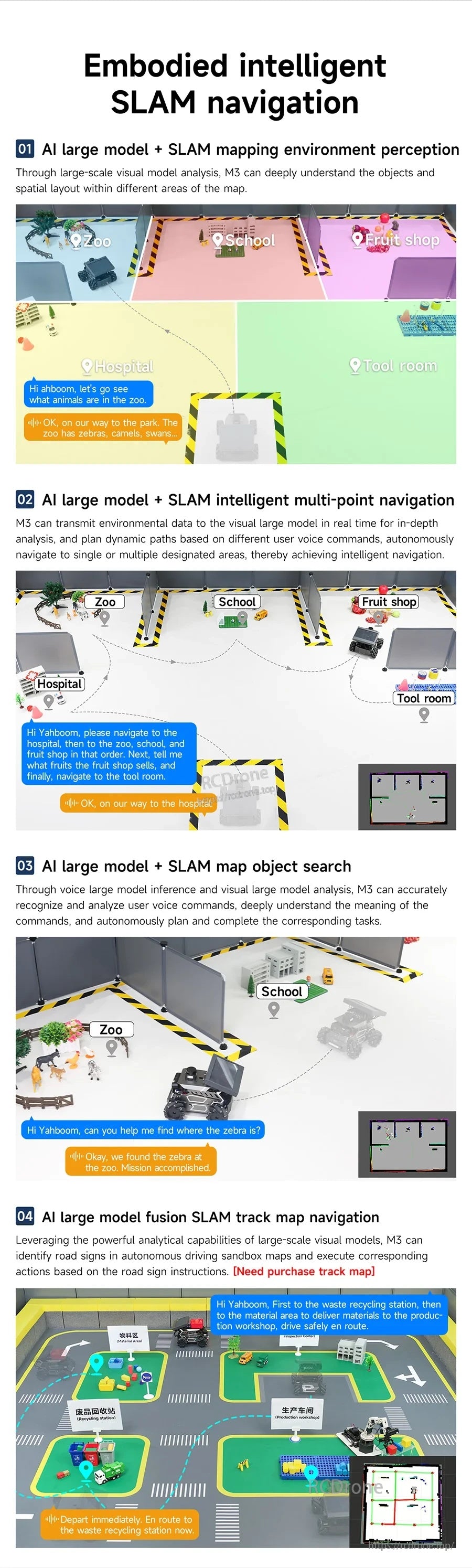
SLAM工作流程涵蓋映射、點對點導航和任務導向的探索。
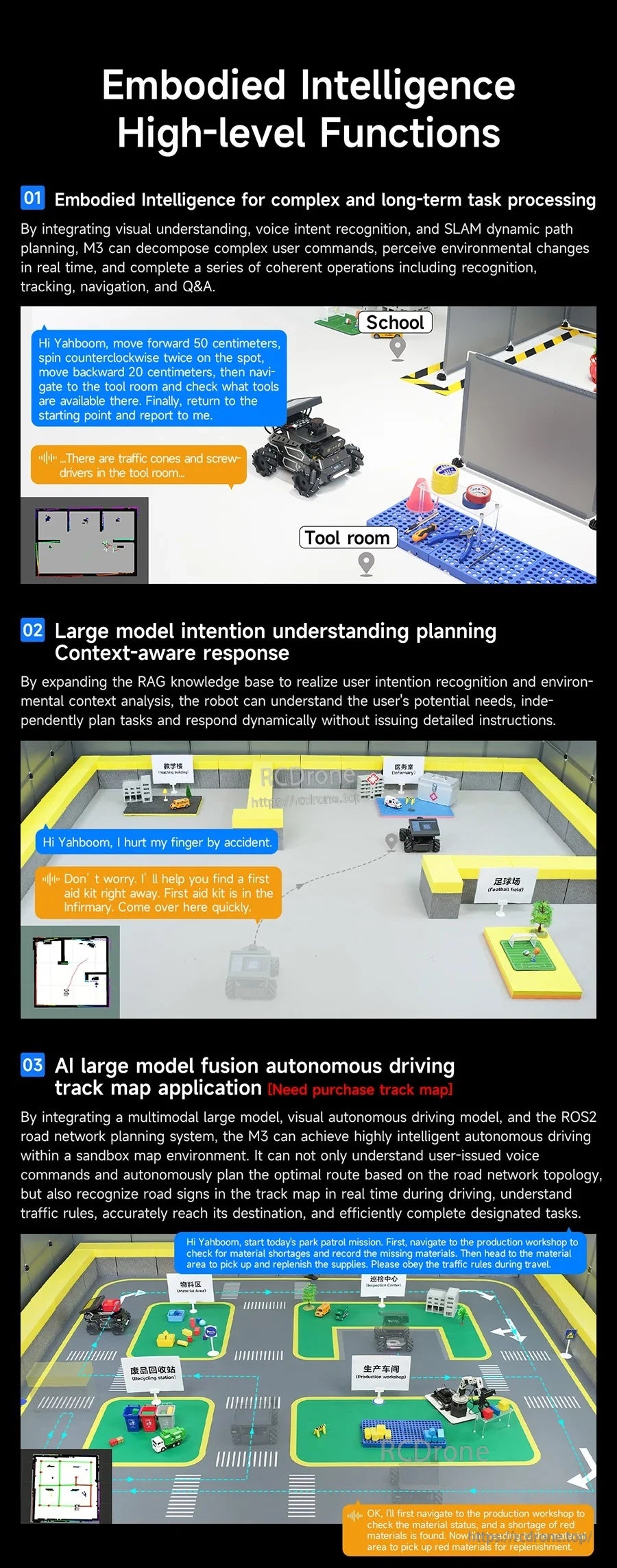
高階規劃結合感知和地圖繪製,以更可靠地執行逐步任務。
使用選擇指南來匹配您的控制器和傳感器需求,涵蓋標準、高級和終極選項。
傳感器融合和ROS工具支持地圖繪製、障礙物避免和基於深度的測量。
視覺功能包括檢測、跟踪、手勢識別和多機器人編隊控制。
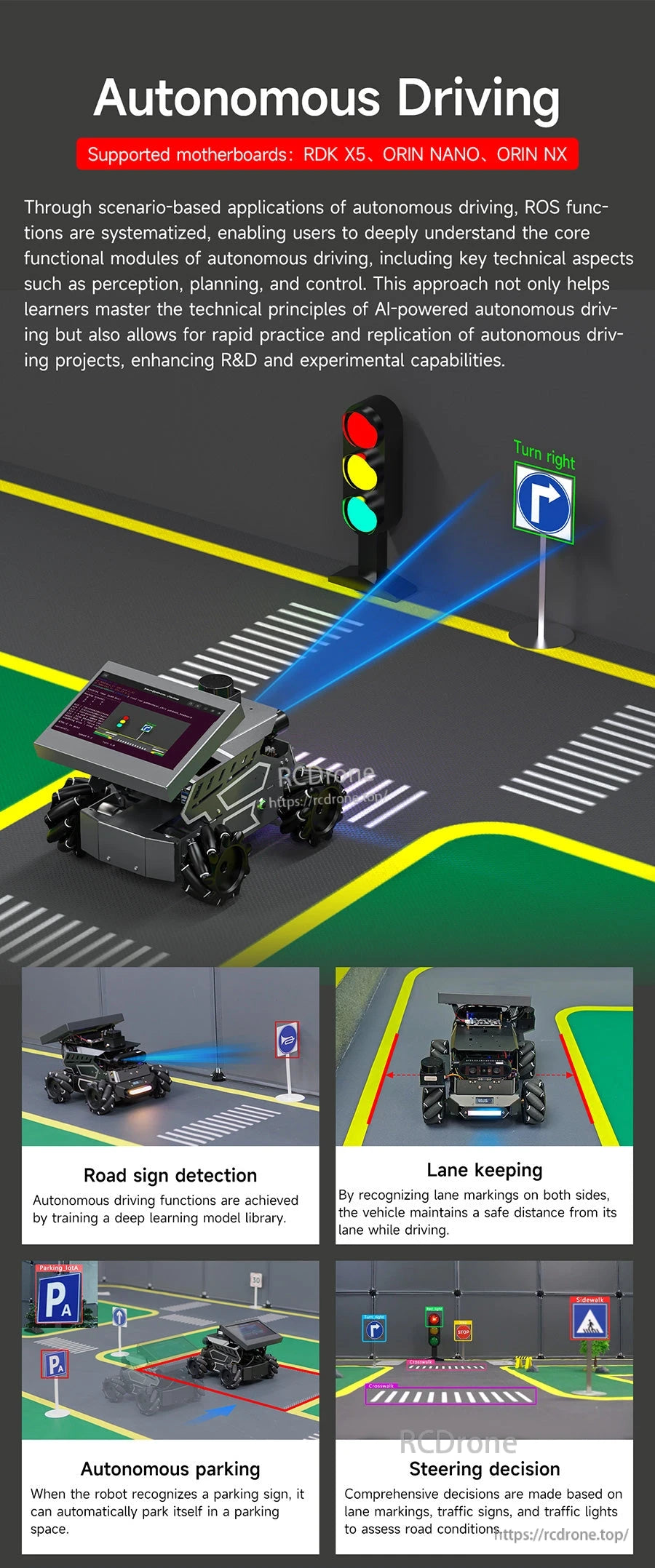
自動駕駛行為包括車道保持、標誌識別、停車程序和轉向決策。

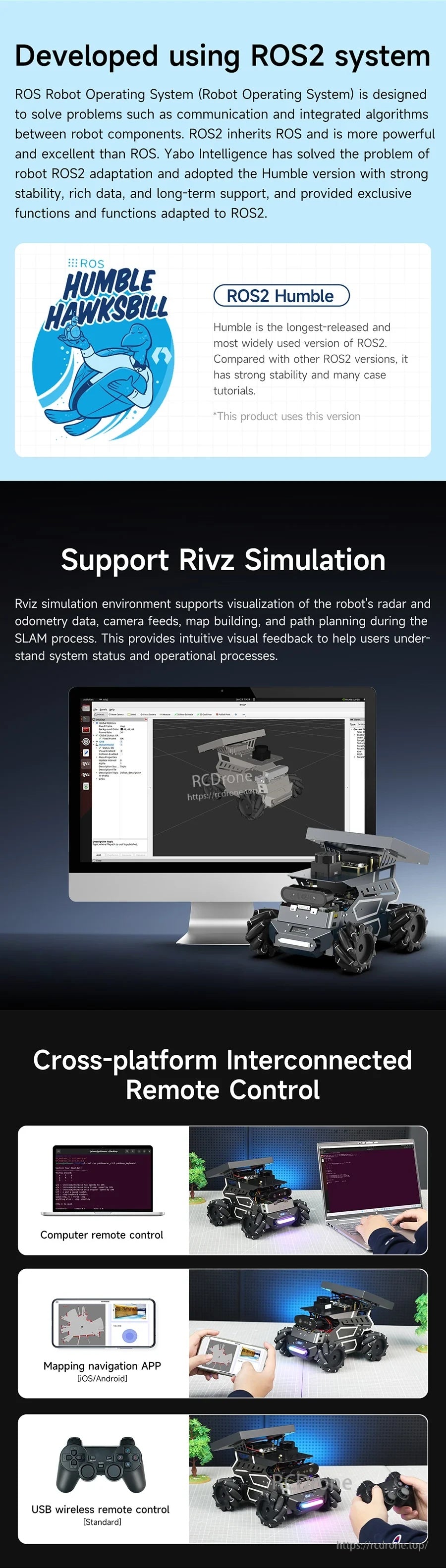
ROS2 Humble開發與RViz模擬和靈活的遠程控制選項配對,用於測試和演示。

爆炸圖展示了模塊化附加設備,如深度相機、LiDAR、可選顯示器和車載照明。
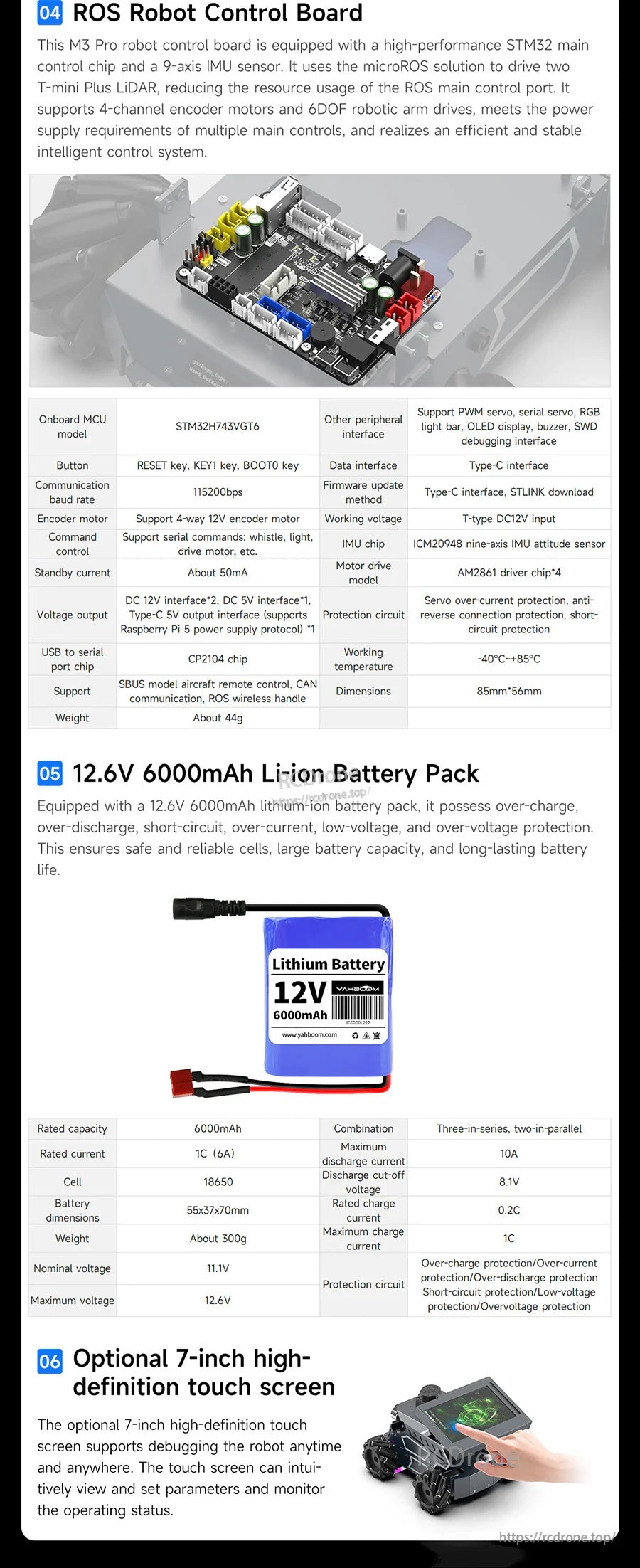
ROS 機器人控制板套裝包括一個 12V 6000mAh 鋰電池組,並支持可選的 7 英寸高清觸摸屏進行互動控制。
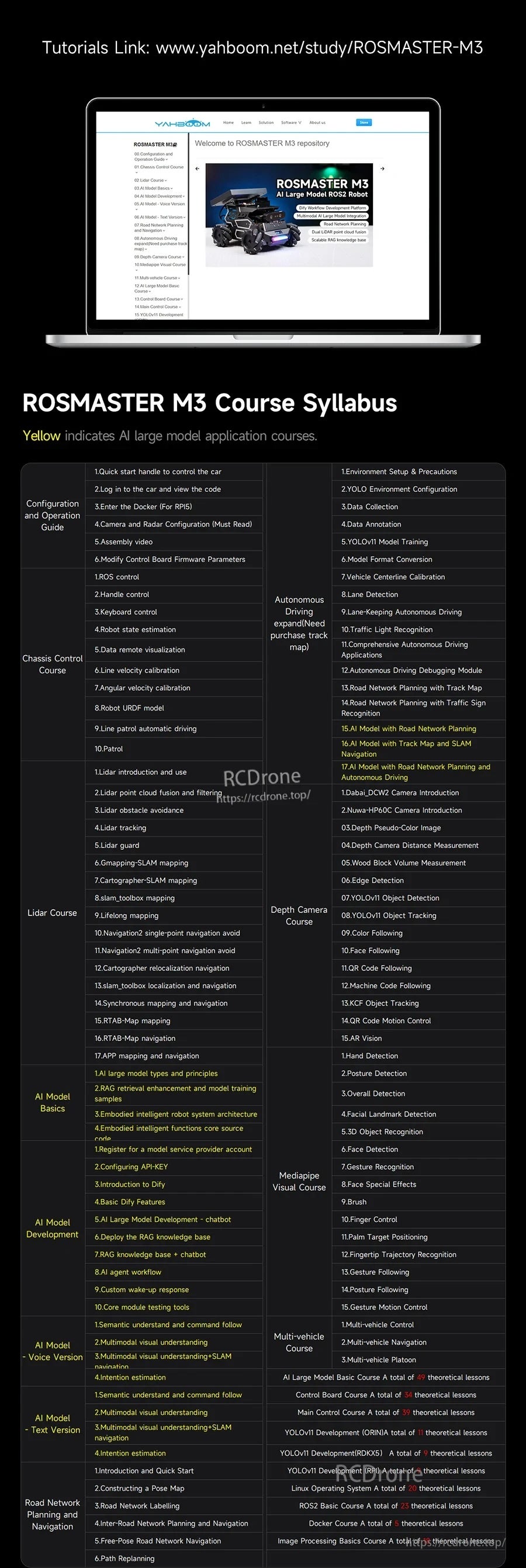
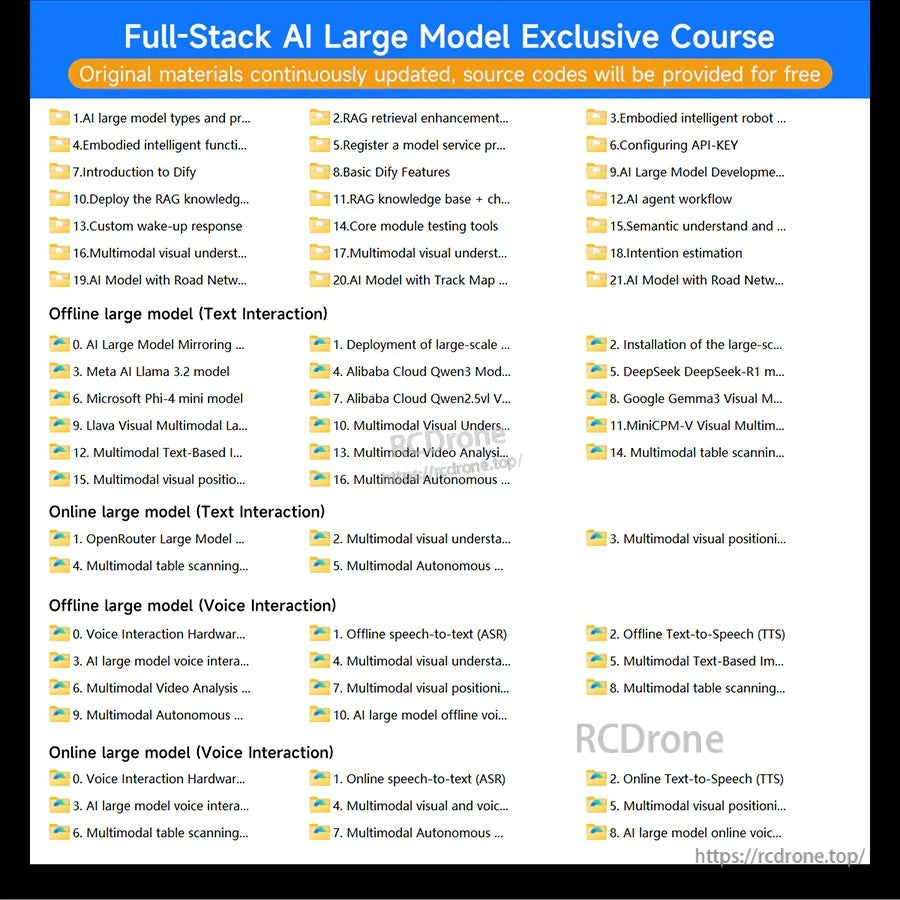
ROSMASTER M3 課程大綱列出了 ROS2 AI 機器人項目的視頻課程模塊和學習路線圖。
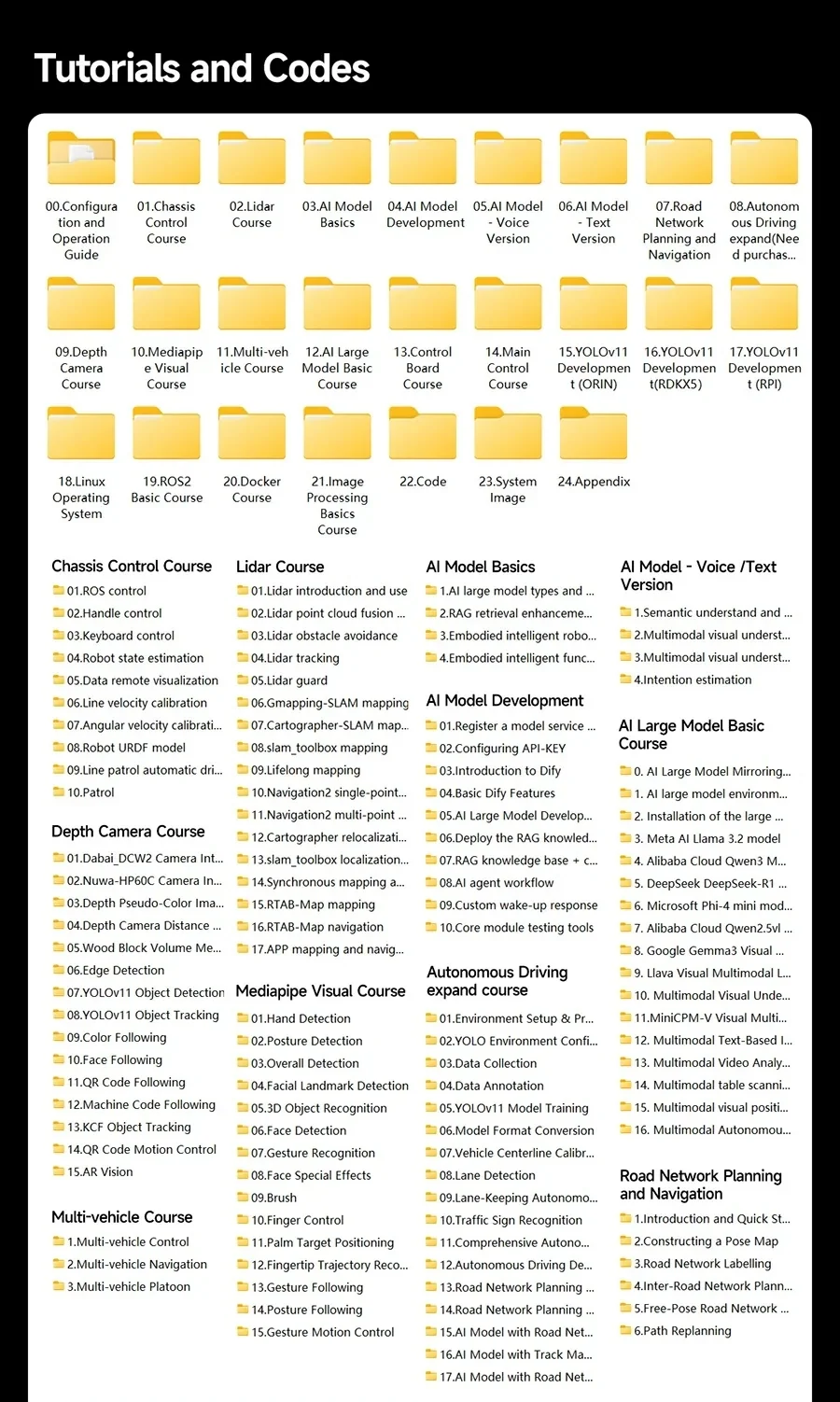
ROSMASTER M3 套件包括組織良好的教程和代碼文件夾,涵蓋底盤控制、LiDAR 設置和 AI 模型開發主題。
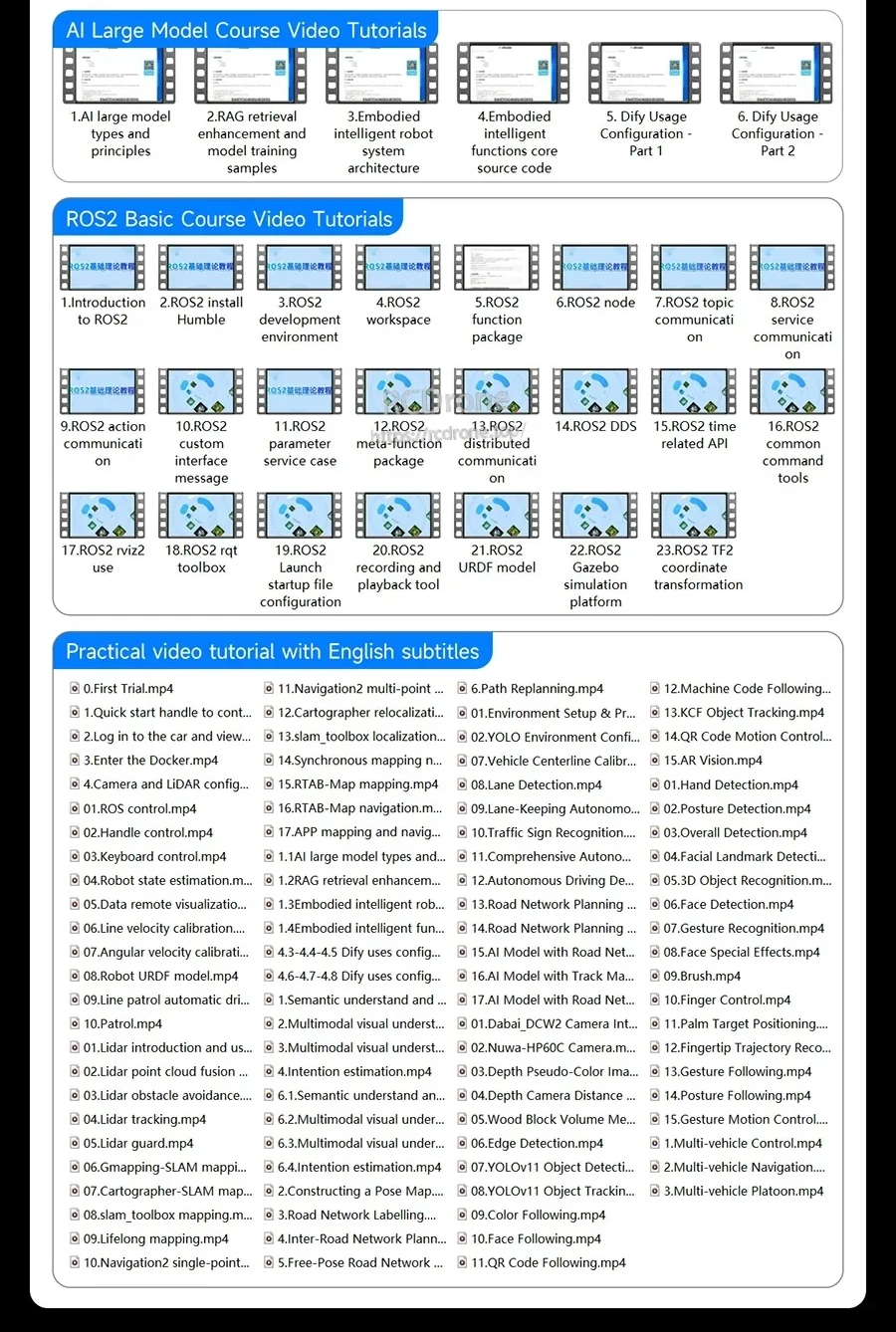
ROSMASTER M3 學習資源概述了 AI 大模型教程、ROS2 基礎課程視頻和實用材料,以指導設置和開發。
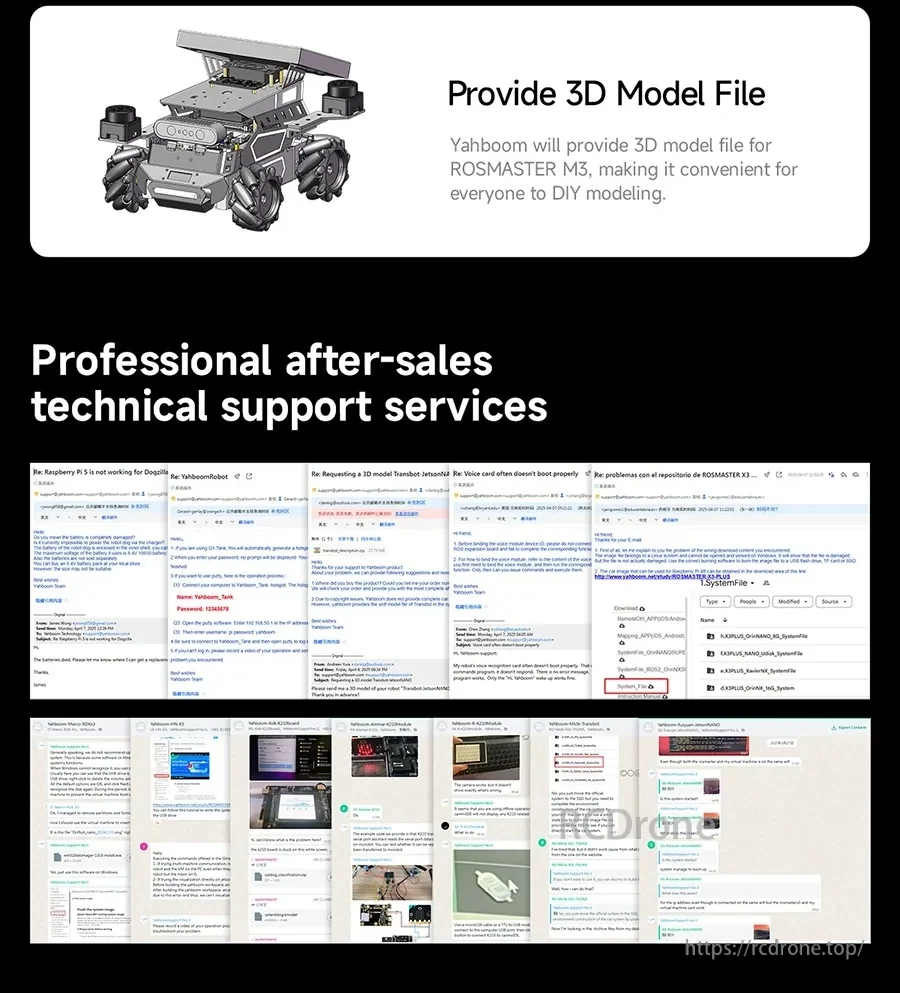
Yahboom 提供 ROSMASTER M3 3D 模型文件和售後技術支持,以幫助 DIY 建模和設置。

ROSMASTER M3 平台選項涵蓋阿克曼轉向、RGBD/USB 攝像頭選擇、0.91 英寸 OLED 顯示屏和多種控制板選擇。
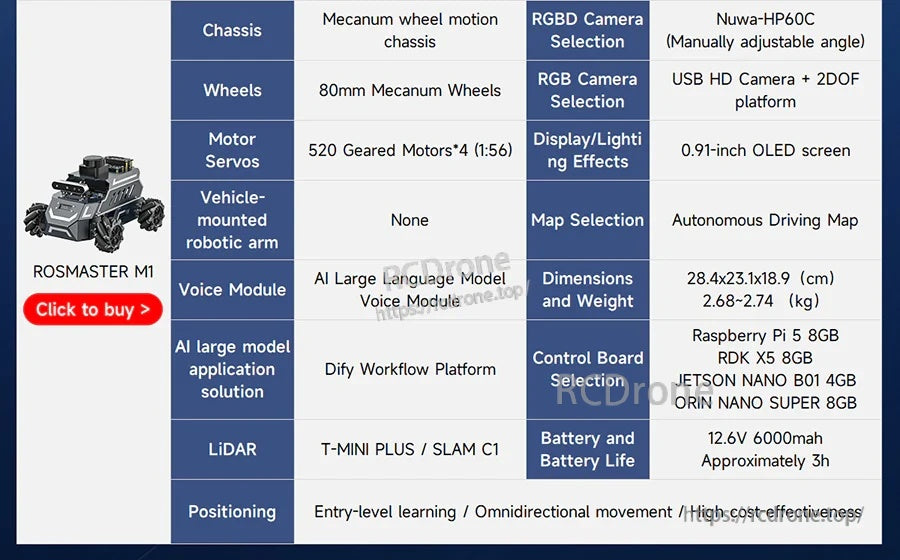
ROSMASTER M3 使用 80 毫米的麥克納姆輪底盤,並列出 AI 語音模組、多個控制板和 12.6V 6000mAh 電池等選項。
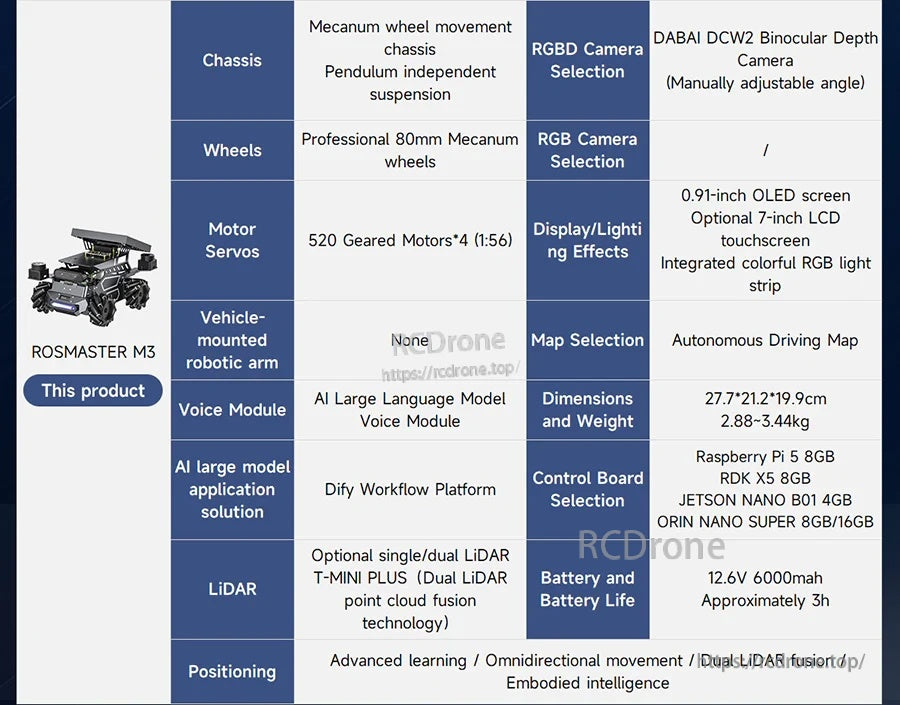
ROSmaster M3 使用麥克納姆輪底盤,提供多種攝像頭和控制板選項,並配備 12.6V 6000mAh 電池組以支持移動構建。
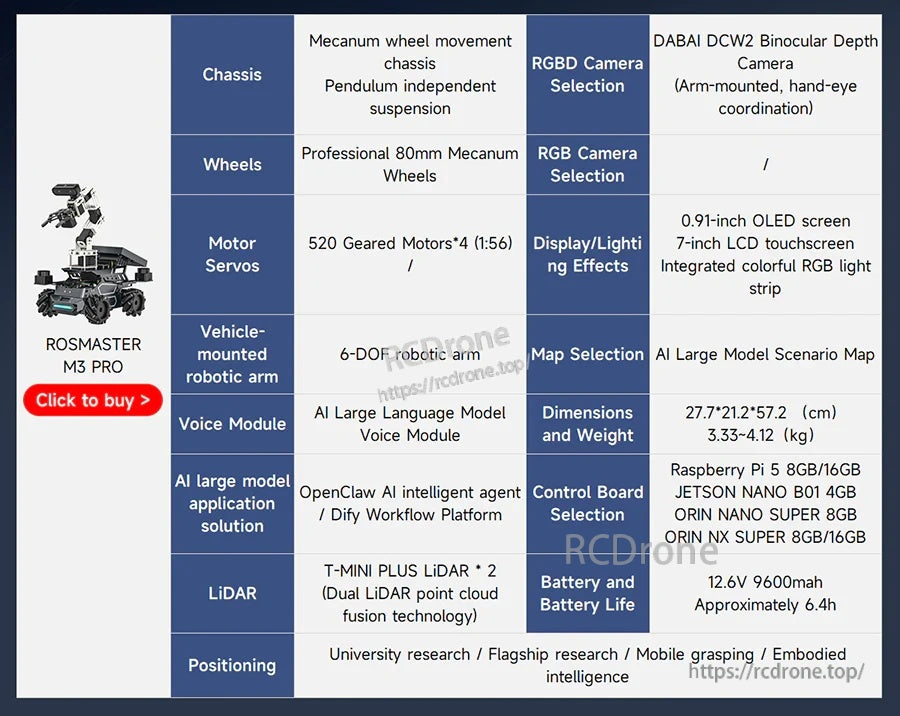
ROSMaster M3 PRO 結合了麥克納姆輪底盤和 6 自由度機械臂,支持 LiDAR、深度攝像頭以及 Raspberry Pi 或 Jetson 控制板。
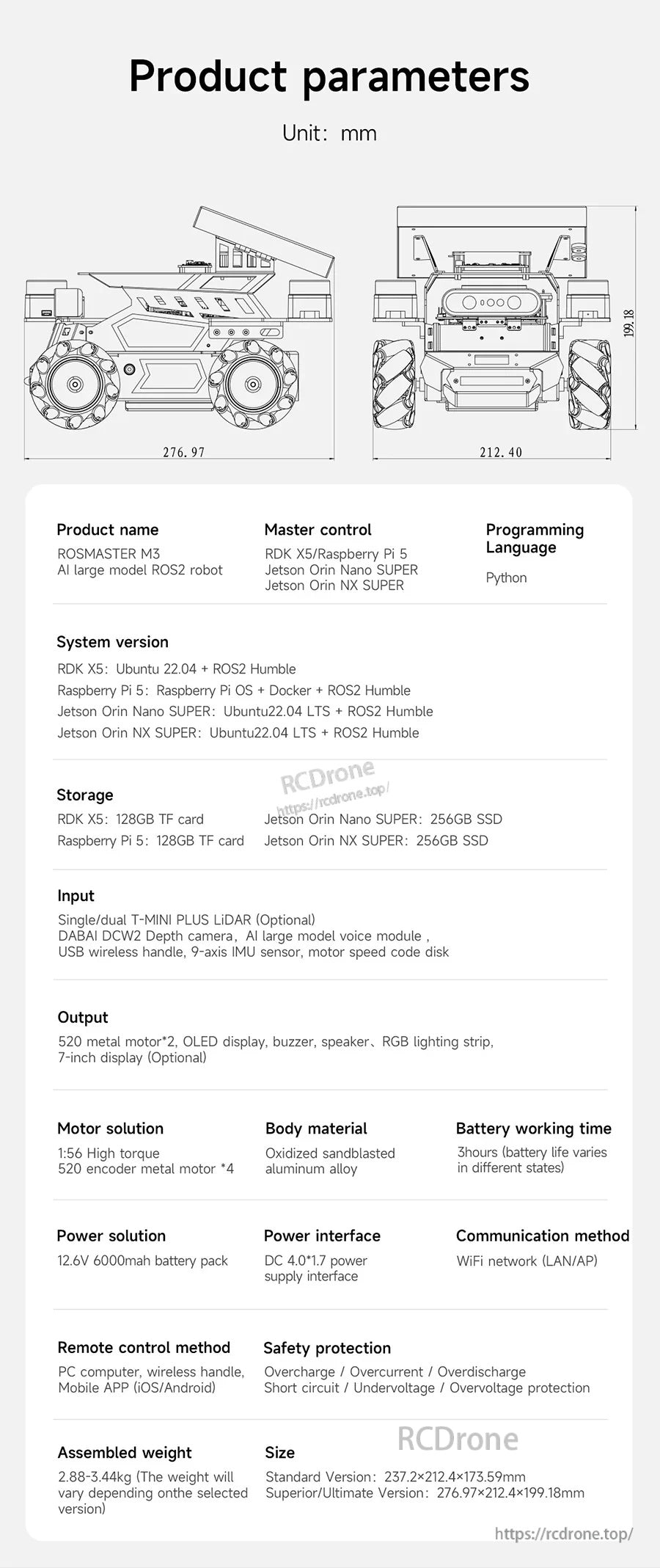
ROSMASTER M3 規格表包括尺寸圖和關鍵細節,如 ROS2 支持和 Python 編程。
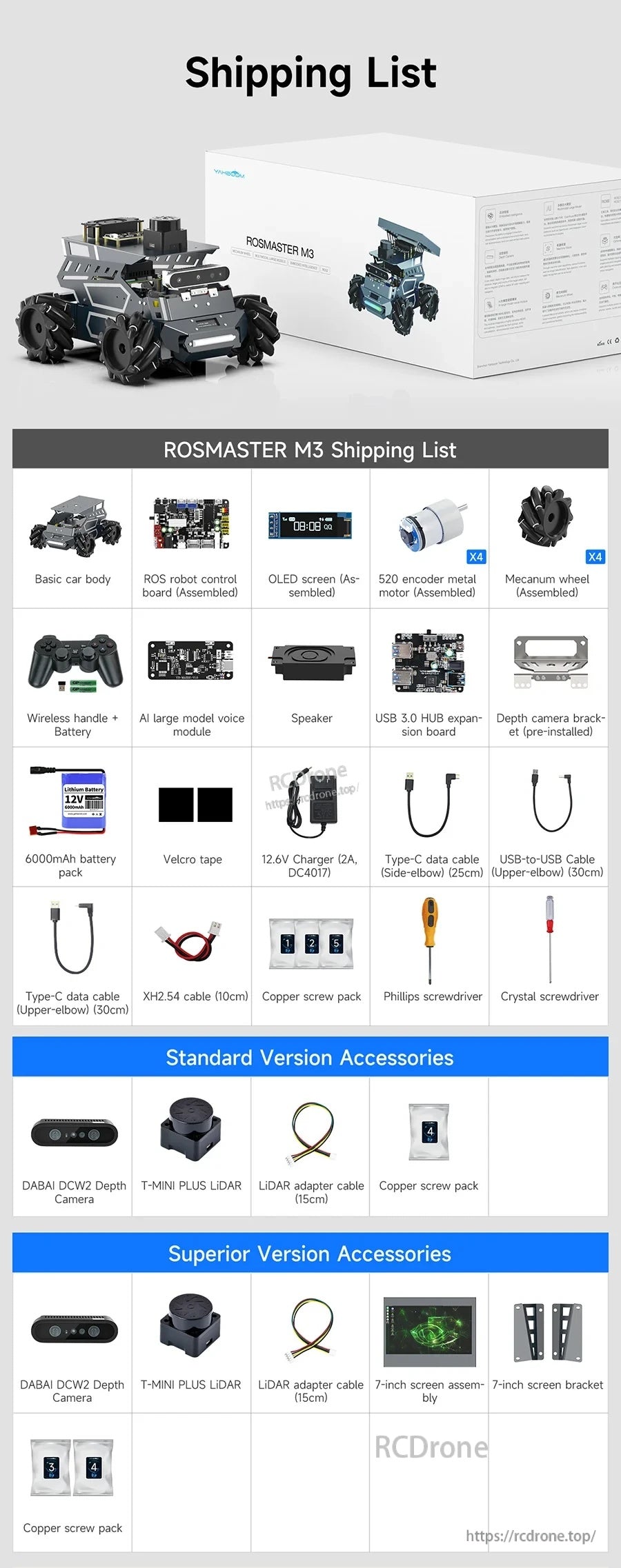
ROSMASTER M3 套件包括機器人底盤以及核心電子元件、傳感器和組裝所需的基本電纜和配件。
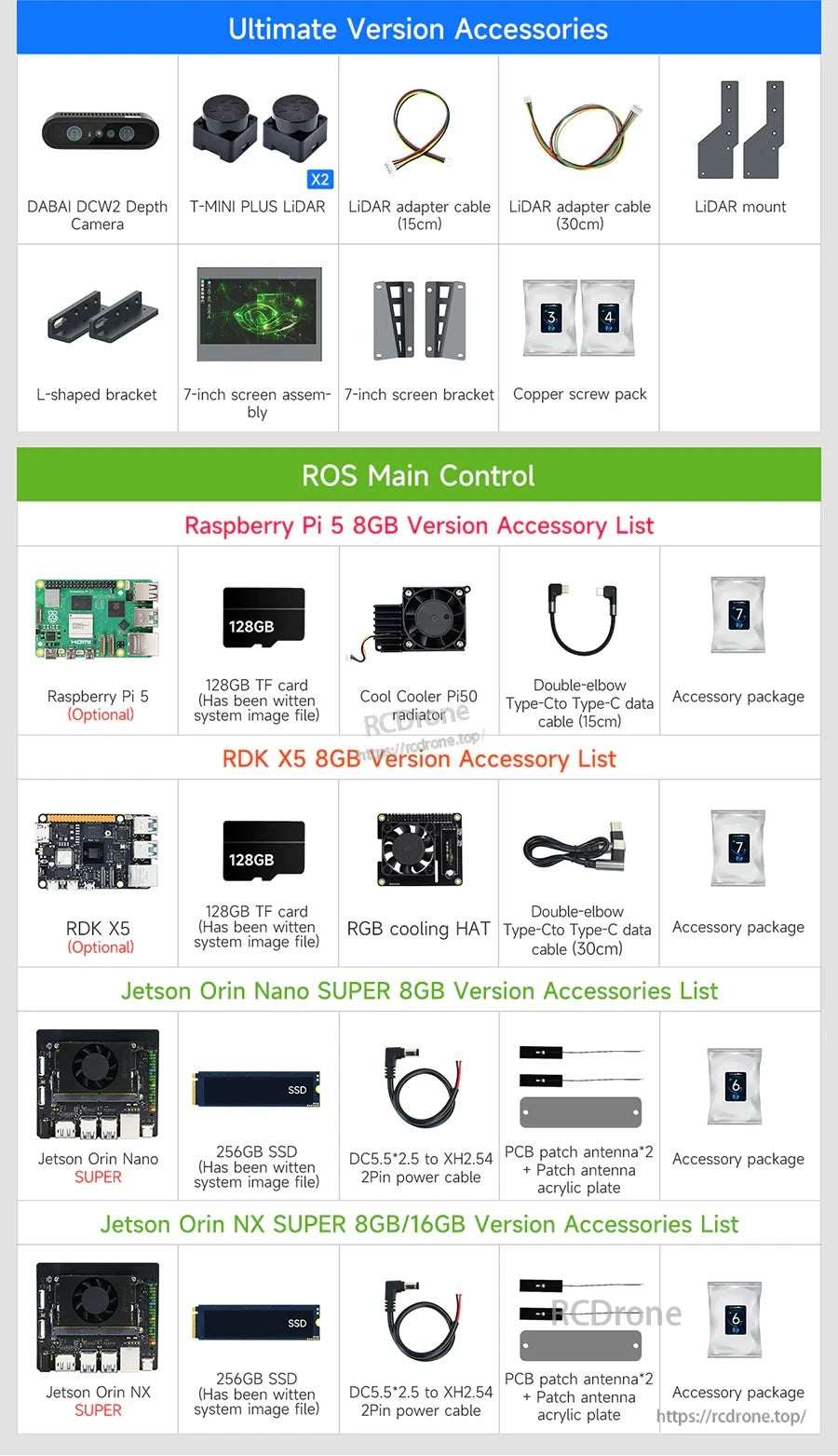
ROSMASTER M3 配件系列包括 LiDAR 和深度相機模組、帶支架的 7 英寸螢幕、安裝座和不同的主控板套裝。






























