S2-F290可程式無人機-Pixwawk開源ROS SLAM AI二次開發工業級無人機挑戰賽
S2-F290可程式無人機-Pixwawk開源ROS SLAM AI二次開發工業級無人機挑戰賽
RCDrone
無法載入取貨服務供應情況
概述
這 S2-F290可程式無人機 是一個高性能的 工業級無人機 專為二次開發和無人機挑戰而設計。設有 有效載荷2400g, 一個 6S 6000mAh電池,和一個 最大控制距離10KM,它提供精度 GPS定位精度約1-2m 和 抗風等級3-4級。動力由 Pixhawk 2.4.8 飛行控制器 和 開源ROS SLAM技術,無人機支援高級功能,例如 3D LiDAR 測繪、基於 YOLO 的物體識別和編隊飛行。它是 3mm碳纖維車架 確保卓越的耐用性和穩定性,並在極端條件下進行測試。該平台具有高度可自訂性,提供中/英文QGC地面站支援、模組化可擴展性和全面的教程等功能,使其成為研究、競賽和開發應用的理想選擇。
規格
飛機
| 範圍 | 規格 |
|---|---|
| 姓名 | S2-F290可程式無人機 |
| 有效負載重量 | 2400克 |
| 模型 | S2-F290 |
| GPS定位精度 | 約1-2m |
| 軸距 | 290毫米 |
| 最大起飛重量 | 3190克 |
| 電池 | 6S標配6000mAh電池 |
| 控制距離 | 10KM(建議1000m以內) |
| 抗風能力 | 3-4 級 |
| 運作環境 | 室內/室外 |
| 耐力測試結果 | 細節 |
|---|---|
| 螺旋槳 | 7吋 |
| 電池容量 | 6S 6000mAh(使用5300mAh) |
| 環境 | 無風 |
| 飛行時間 | 11分30秒 |
飛行控制器
| 成分 | 規格 |
|---|---|
| FMU處理器 | STM32H743 Cortex-M7,480MHz,2MB 快閃記憶體,1MB SRAM |
| IO處理器 | STM32F103 Cortex-M3,72MHz,64KB SRAM |
| 感應器 | 加速度計/陀螺儀:ICM-42688-P |
| 加速度計/陀螺儀:BMI055 | |
| 磁力計:IST8310 | |
| 晴雨表:MS5611 | |
| 額定電壓 | 最大輸入電壓:6V |
| USB電源輸入:4.75-5.25V | |
| 伺服輸入:0-36V | |
| 額定電流 | 遙測1最大輸出電流:1A |
| 其他連接埠綜合電流:1A | |
| 機械數據 | 尺寸:53.3×39×16.2毫米 |
| 體重:39。2克 | |
| 港口 | - 14 個 PWM 輸出(8 個來自 IO,6 個來自 FMU) |
| - 2個通用串口 | |
| - 2 個 GPS 端口 | |
| - 1 個 I2C 端口 | |
| - 2 個 CAN 端口 | |
| - Spektrum/DSM、S.BUS、CPPM 等的 RC 輸入 | |
| - 電源輸入埠 | |
| 其他特點 | 工作溫度:-40–85°C |
機上電腦
| 成分 | 規格 |
|---|---|
| 運算能力 | 40 上衣 |
| 圖形處理器 | 32 個 Tensor 核心和 1024 核心 NVIDIA Ampere GPU |
| 中央處理器 | 6 核心 Arm Cortex-A78AE v8.2 64 位,1.5GHz |
| 記憶體 | 8GB 128 位元 LPDDR5 68GB/秒 |
| 貯存 | SD 卡或外部 NVMe |
| 最大CPU頻率 | 1.5GHz |
遙控器
| 成分 | 規格 |
|---|---|
| 工作電壓 | 4.2V |
| 工作電流 | 100毫安 |
| 頻帶 | 2.4–2.483GHz |
| 重量 | 525克 |
| 方面 | 130×150×20毫米 |
| 電池壽命 | 20小時 |
| 充電口 | 微型USB |
| 控制範圍 | 7公里 |
全球定位系統
| 成分 | 規格 |
|---|---|
| 衛星接收器 | UBLOX-M9,92 通道 |
| 電子羅盤 | QMC5883L |
| 衛星系統 | GPS L1 C/A、GLONASS L1OF、北斗 B1、伽利略 E1 |
| 衛星頻道 | 32 |
| 更新率 | 25赫茲 |
| 定位精度 | 1.5m CEP(理想環境) |
| 啟動時間 | 冷啟動:24s,熱啟動:1s |
| 方面 | 25×25×8毫米 |
| 重量 | 12克 |
電池
| 成分 | 規格 |
|---|---|
| 連接器類型 | XT60 |
| 推薦充電電流 | 3-5A |
| 電池容量 | 6000毫安培時 |
| 標稱電壓 | 22.2V |
| 放電率 | 75℃ |
| 方面 | 50×44×158毫米 |
| 重量 | 816克 |
光達
| 成分 | 規格 |
|---|---|
| 雷射波長 | 905奈米 |
| 範圍 | 40m @ 10% 反射率,70m @ 80% 反射率 |
| 最小檢測區域 | 0.1m |
| 視野 | 水平:360°,垂直:-7°至52° |
| 點雲輸出 | 200,000點/秒 |
| 積分率 | 10赫茲 |
| 防護等級 | IP67級 |
| 力量 | 6.5W(25℃環境) |
| 電壓範圍 | 9–27V 直流 |
| 方面 | 65×65×60毫米 |
| 重量 | 265克 |
深度相機
| 成分 | 規格 |
|---|---|
| 深度科技 | 雙紅外線 |
| 深度視角 | 87°×58°(水平×垂直) |
| 深度解析度 | 1280×720 |
| 深度精度 | 2m內<2% |
| 深度幀率 | 90幀/秒 |
| 深度範圍 | 0.3-3m |
| 方面 | 90×25×25毫米 |
| 運作環境 | 室內/室外 |
單鏡頭相機
| 成分 | 規格 |
|---|---|
| 最大解析度 | 2MP(1920×1080) |
| 最大幀速率 | 30幀/秒 |
| 視野 | ~90° |
| 電纜長度 | 〜1。5m |
| 方面 | 35×35×30毫米 |
功能表
| 塗油 | 基本配置 | 可選D435 | 選配D435+4G模組 |
|---|---|---|---|
| 定高、懸停、返航 | ✔ | ✔ | ✔ |
| 著陸、穩定、航點飛行 | ✔ | ✔ | ✔ |
| 遙控飛行 | ✔ | ✔ | ✔ |
| 飛控與機載電腦之間的通信 | ✔ | ✔ | ✔ |
| QR 圖碼辨識及落地 | ✔ | ✔ | ✔ |
| 物體辨識和掉落 | ✔ | ✔ | ✔ |
| 同步測繪和避障 | ✔ | ✔ | ✔ |
| 3D LiDAR 測繪與定位 | ✔ | ✔ | ✔ |
| 基於YOLO的物體識別 | ✘ | ✔ | ✔ |
| 物體辨識與追蹤 | ✘ | ✔ | ✔ |
| 4G遠端控制 | ✘ | ✘ | ✔ |
套餐內容
基本配置
- 框架:F290碳纖維車架
- 馬達: 4× T-馬達 F100 Kv1100
- ESC鍵: 4× FlyFun 暴龍 5 45A
- 螺旋槳: 4× 7吋三葉螺旋槳
- 飛行控制器:Pixhawk6mini
- 電池:6S標配電池6000mAh
- 充電器:6S電池充電器
- 機上電腦:Jetson Orin Nano 8G + WIFI 模組
- 固態硬碟:256G
- 光達: 力沃 MID360
- 相機:150°廣角USB攝影機
- 遙控器:Cloud T10(含資料接收器)
可選配置:D435
包括來自的所有組件 基本配置,加上:
- 雙鏡頭相機:D435
選配:D435+4G模組
包括來自的所有組件 基本的 配置,加上:
- 雙鏡頭相機:D435
- 4G模組
細節
S2-F290可程式無人機
- ✔ 技術支持,無憂售後服務
- ✔ 提供競賽範例,可自訂
- ✔ 中/英文移動地面站
- ✔ 高穩定性、高性能
- ✔ 室內/室外
S2-F290是一款專為無人機競賽量身定制的尖端無人機,專注於探索和創新。它融合了先進技術和無限創意,能夠適應各種複雜環境,讓空中探索變得更加便利和有效。
該無人機設計緊湊,動力強勁。提供豐富的競賽實例,讓使用者快速掌握並優化其效能。配備專用中/英文移動地面站,大大增強無人機操作便利性。此外,它還提供有競爭力的原始碼解釋和可自訂性,以確保用戶能夠在最短的時間內實現所需的功能,同時在競爭場景中脫穎而出。

滿足發展/競爭/研究的需求
| 類別 | 細節 |
|---|---|
| ROS基礎知識 | - 遙控 |
| - 飛行控制器與機載電腦之間的通信 | |
| 基本功能 | - 路線規劃 |
| - 二維碼辨識與定位 | |
| - 船外自主巡邏 | |
| 進階功能 | - 二維碼辨識登陸 |
| - 物體辨識和丟棄 | |
| - 同步測繪和避障 | |
| - 3D LiDAR 測繪與定位 | |
| - 基於YOLO的物體識別 | |
| - 網路為基礎的視訊傳輸 | |
| - 戶外編隊飛行 | |
| - 陸空協同編隊 | |
| 選購的 D435 相機功能 | - VINS視覺定位 |
| - 基於YOLO的物體辨識與追蹤 | |
| 可選4G通訊功能 | - 4G遠端控制 |
自主避障,安全保障全面
無人機利用3D雷射雷達進行自主避障,將全域路徑規劃與局部動態避障結合,精確偵測各個方向的障礙物。支援自動停止和連續飛行,靈活避讓飛行路徑上的物體,確保更安全的飛行體驗。

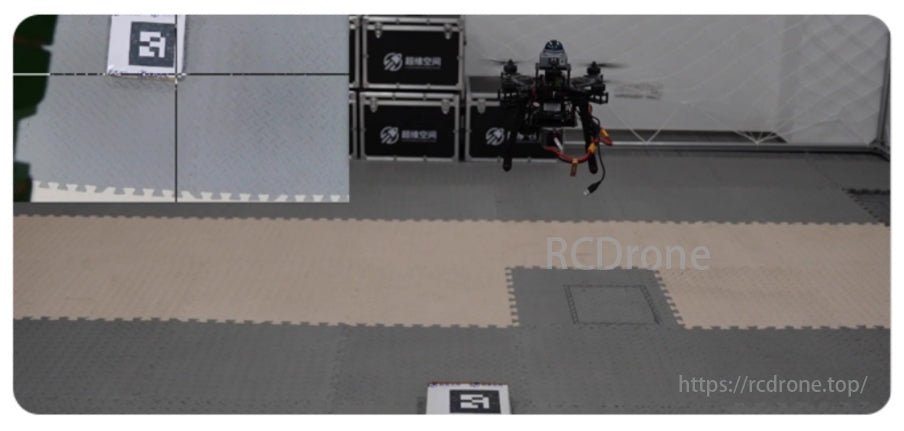
QR 圖碼辨識及登陸
無人機啟動攝影機和二維碼識別模組,取得二維碼的即時位置資訊。在下降過程中,無人機會動態調整其位置,確保在著陸前與相機的視野精確對齊。
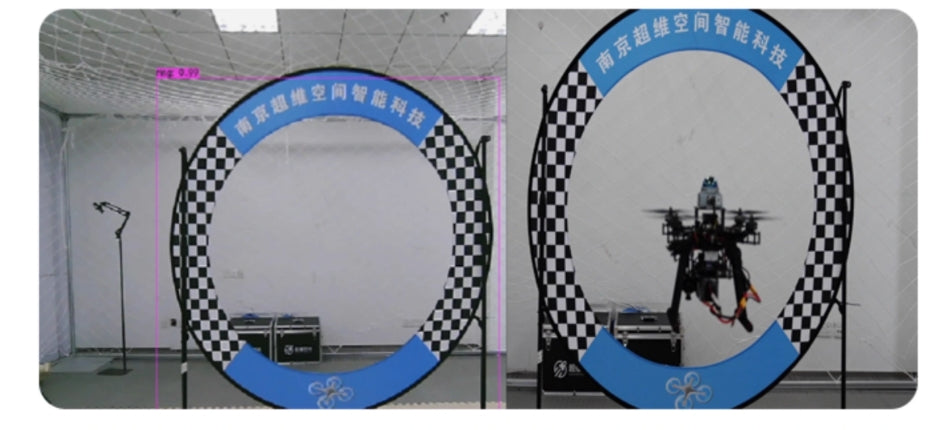
YOLO物體識別
無人機使用YOLOv8進行物體識別,即時取得圓形框架的位置資訊。它自主調整其位置並在圓形框架中導航。
戶外編隊飛行
該無人機採用集群編隊技術,可協同控制多架無人機實現編隊飛行。透過利用先進的通訊和協同控制演算法,它可以促進無人機之間的即時通訊和資訊交換,同步它們的動作和位置,形成緊密的編隊。

陸空協同編隊
該平台支援陸地和空中無人機之間的協作編隊。利用具有拓樸結構的區域網路進行設備互聯,採用UDP通訊和自訂協議,確保高速穩定的通訊。透過PID控制,實現主無人機與多從無人機的同步跟隨,確保編隊穩定性與作業效率。

競賽實例
提供專屬比賽場景,逐步指導,讓參賽者輕鬆適應各類比賽。



S2-F290可程式無人機的特點
高性價比
- 專為初學者設計,減少學習曲線,更輕鬆掌握無人機操作。
- 價格實惠,使其成為學生和愛好者的理想學習無人機。
高穩定性
- 經過三年多的各種極端條件下的測試。
- 配備 3 毫米厚的碳纖維框架,可增強耐用性和穩定性。
- 讓使用者在初次比賽體驗中獲得認可。
擴充性
- 支援多種應用的高級客製化。
- 相容於各種擴充組件,不斷提升無人機性能與功能。
無憂售後服務
- 專業團隊提供全面指導和支援。
- 保固期內因操作失誤造成的硬體損壞提供免費維修(配件和電池除外)。
可客製化
- 為ROS和QGC的獨家開發提供支援。
- 支援98%以上的高精度地圖和導航。
- 相容於 RTK/GPS 模組、標誌和各種獨特功能。

地面站配置
使用Pixhawk 2.4.8飛控
此飛控配備最新標準32位元STM32F427處理器和MS5611氣壓計,介面豐富,開源,性價比高。
1.獨家深度客製化的QGC地面站
- 實現98%以上的中文本地化。
- 支援NTRIP等高級功能。
2.移動QGC地面站
- 提供 QGC 地面站的行動版本,可透過智慧型手機實現無縫操作。
3. Wi-Fi或4G直連
- 只需透過 Wi-Fi 連線即可使用智慧型手機或電腦操作。
- 筆記:「ezuav」系統顯示已連接至設備,但無法提供網路存取。

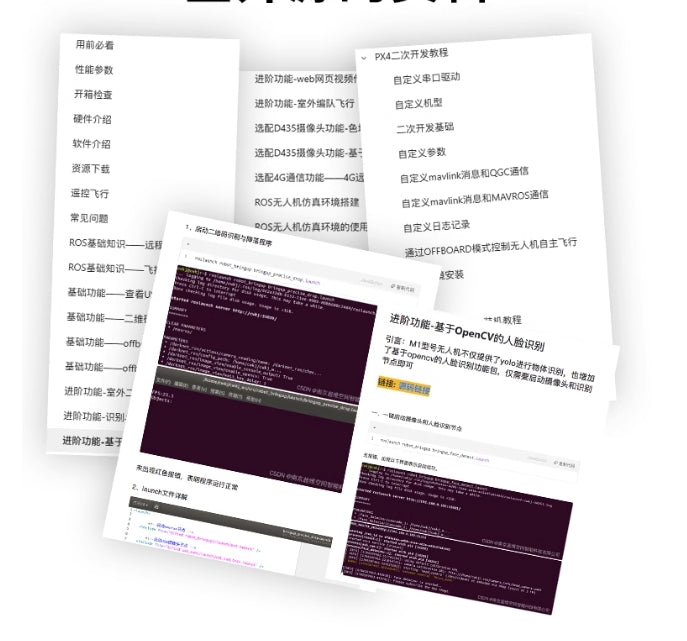
全面的教學和完全開源的資源
- 極其詳細的使用教程,涵蓋 S2-F290 無人機功能的各個方面。
- 完全開源的材料,包括:
- 軟體介紹和安裝指南。
- 有關基本和高級功能的教程,例如基於 OpenCV 的物件識別、3D 映射和機外自主飛行。
- PX4 和 MAVLink 通訊的自訂開發指令。
- 故障排除常見問題、ROS 環境配置和操作步驟。