傳感SG3S-ISX031C-GMSL2F 3MP GMSL2相機,Sony ISX031,Max96717f,196度HFOV,IP67,YUV422 30FPS,FAKRA-Z
傳感SG3S-ISX031C-GMSL2F 3MP GMSL2相機,Sony ISX031,Max96717f,196度HFOV,IP67,YUV422 30FPS,FAKRA-Z
RCDrone
定價
$549.00 USD
定價
售價
$549.00 USD
單價
每
已包含稅額。
結帳時計算運費。
無法載入取貨服務供應情況
概述
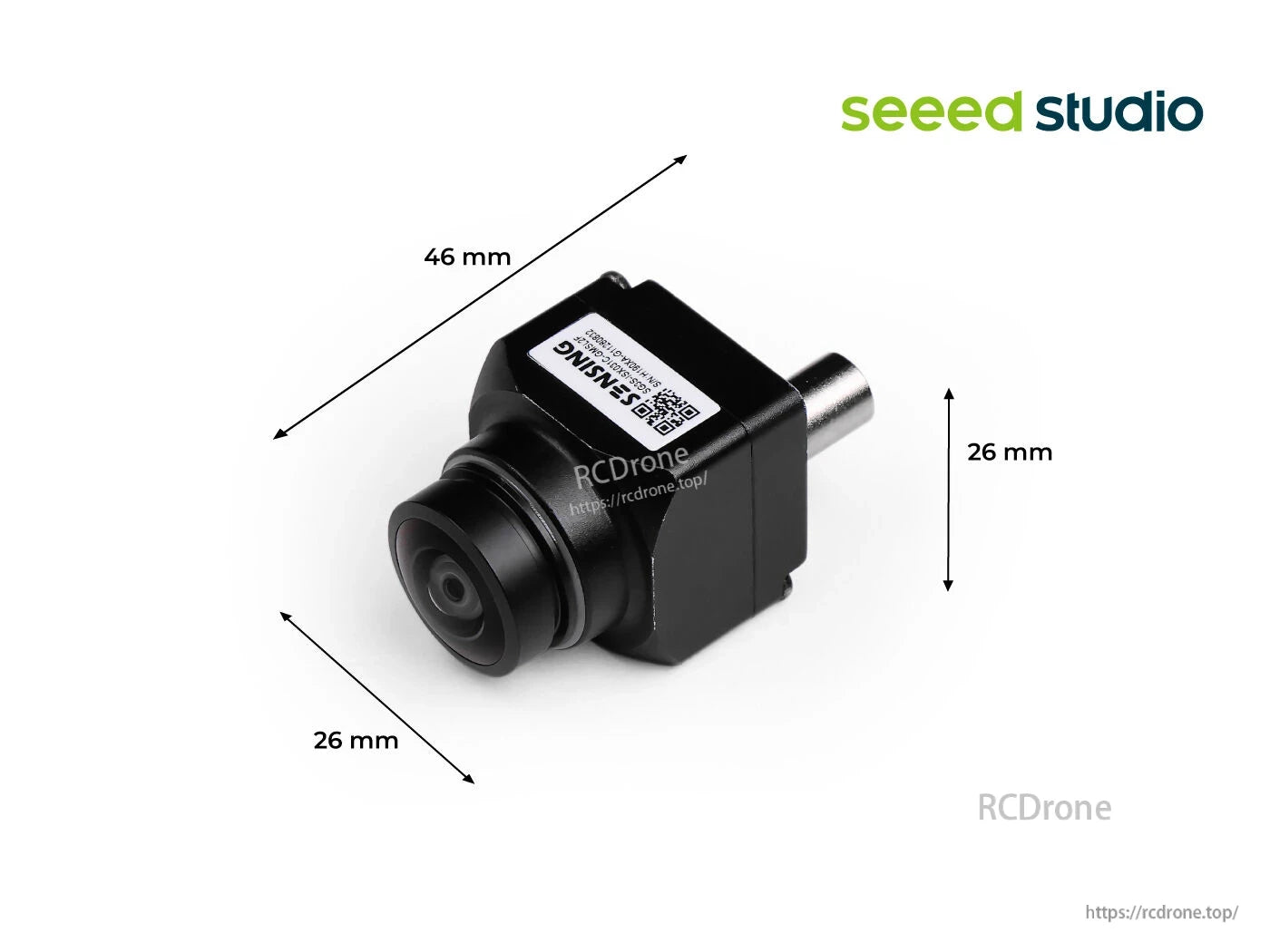
感測 SG3S-ISX031C-GMSL2F 是一款 3MP GMSL2 相機,基於Sony CMOS 影像感測器 ISX031 和 Maxim GMSL2 串列器 MAX96717F 打造。它提供 196 度超寬水平視野 (FOV) 和 154 度垂直視野 (FOV)。該模組整合了經過精心調校的影像訊號處理器 (ISP),能夠以 30fps 的幀率輸出未壓縮的 3MP 8 位元 YUV422 影像。它採用 IP67 防護等級的外殼,並配備已在工廠調焦和粘合的 AA 鏡頭。 Fakra-Z 連接器提供 GMSL2 資料和同軸電纜供電 (PoC),使其適用於機器人和汽車應用。它支援 HDR 成像和用於多攝影機同步的外部觸發器。
主要特點
- 透過 Fakra-Z 連接器的 GMSL2 介面;非常適合機器人和汽車應用
- 超寬視野:196 度(水平)和 154 度(垂直)
- 內建 ISP,支援未壓縮 3MP 8 位元 YUV422,幀率為 30fps
- HDR 支援具有挑戰性的照明
- 外部觸發和多台相機同步
- IP67 等級外殼,具備環境保護功能
- AA 鏡頭,工廠調焦並黏合
- 9V ~ 16V 同軸供電
規格
| 產品 | SG3S-ISX031C-GMSL2F-H190XA |
| 影像感測器 | 索尼CMOS ISX031 |
| 序列化器 | 美信 MAX96717F |
| 解決 | 3MP |
| 輸出格式 | 未壓縮 3MP 8 位元 YUV422 |
| 幀速率 | 30幀/秒 |
| 通訊介面 | GMSL2 |
| 連接器 | 法克拉-Z |
| 電壓 | 9V ~ 16V(同軸供電) |
| 工作溫度 | -40℃~85℃ |
| 機械尺寸 | 25毫米 x 25毫米 x 18.6毫米 |
| 高頻光學成像 | 196度 |
| 垂直視場 | 154度 |
| 外殼 | IP67 等級 |
| 鏡片 | AA 鏡頭,工廠調焦並黏合 |
| HDR | 支援 |
| 外部觸發器 | 支援 |
硬體概述
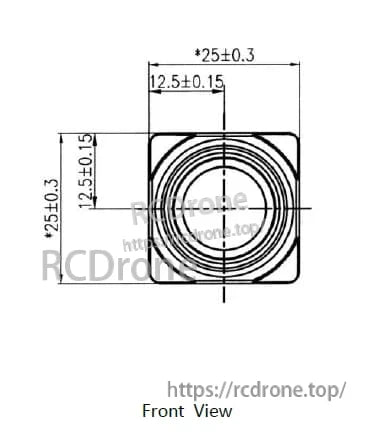
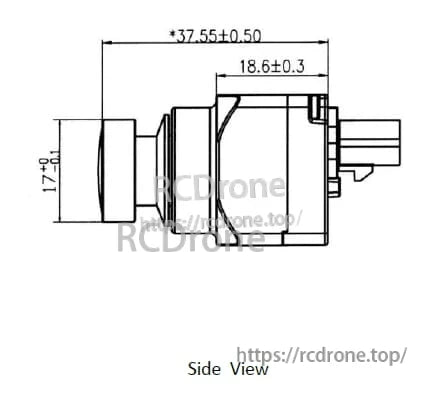
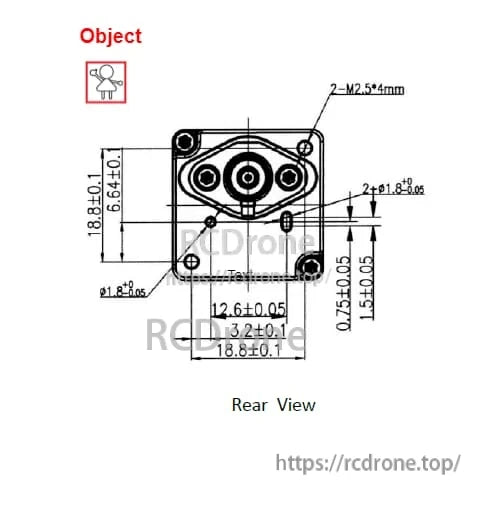
小型外殼,前端尺寸為 25mm x 25mm,深度為 18.6mm。機械圖紙提供正面、側面和背面視圖,包括安裝孔和 GMSL2 的 Fakra-Z 介面(帶 PoC)。
包含的內容
- SG3S-ISX031C-GMSL2F-H190XA x1
- 同軸母對母電纜 x1
應用
- ADAS 影像
- BEV 檢測(鳥瞰圖)
- 機器人技術
Jetson AGX Orin 上的多 GMSL 相機用於即時物體偵測和 3D 重建
文件
ECCN/HTS
| HSCODE | 8525891900 |
| 美國海關編碼 | 8525895050 |
| 統一專利證書 | |
| 歐盟化學品統一分類與標示條例 | 8517600000 |
| 營運長 | 中國 |
細節
汽車後視鏡採用獨特的設計,展示其長度和獨特的後部,以提高可視性。
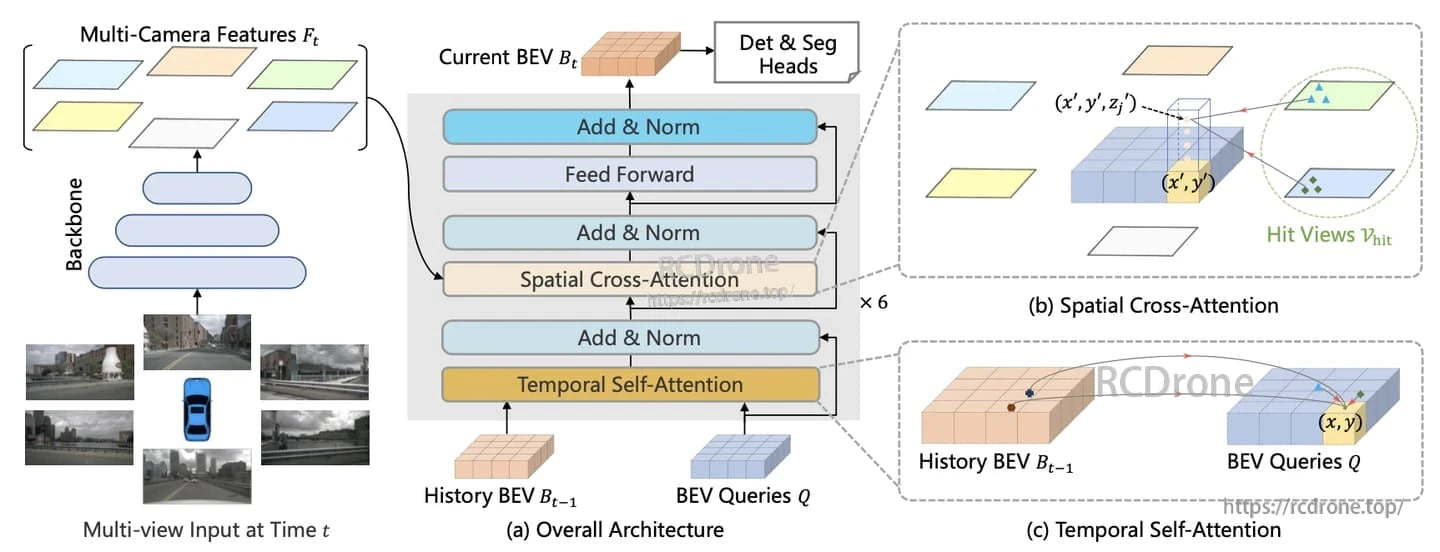
多相機系統透過主幹、時空注意力和 BEV 特徵整合處理多視圖輸入,以進行偵測和分割。