









SteadyWin GIM3510-8 小型機器人關節模組,8:1 行星齒輪,CAN 驅動器,雙編碼器,24V 60W
SteadyWin GIM3510-8 小型機器人關節模組,8:1 行星齒輪,CAN 驅動器,雙編碼器,24V 60W
SteadyWin
定價
$109.00 USD
定價
$120.00 USD
售價
$109.00 USD
單價
每
已包含稅額。
結帳時計算運費。
無法載入取貨服務供應情況
概述
SteadyWin GIM3510-8 小型機器人關節模組是一個集成的機器人關節驅動器,結合了 Aloha 馬達、8:1 行星齒輪減速器、內建通訊驅動器和雙編碼器,並以緊湊的圓柱形包裝設計。它具有名義 24 V 的供電(根據驅動板的不同,寬範圍為 12–40 V 或 12–48 V),經過減速後的高輸出速度可達 564.6 rpm,並支持 CAN 總線通訊,旨在用於靈活的人形機器人、機器手臂、移動平台及其他需要精確閉環運動控制的多軸系統。
主要特點
- 高速行星減速: 8:1 行星齒輪箱,額定輸出速度為 535.5 rpm,最大可達 564.6 rpm (GDZ34),適合快速移動的關節。
- 寬電壓範圍: 名義 24 V 操作,輸入範圍為 12–40 V (GDZ34) 或 12–48 V (GDS34),以便靈活的電源系統設計。
- 高效扭矩輸出: 扭矩常數高達 0.32 N.m/A,額定扭矩高達 1.68 N.m,峰值扭矩高達 6.02 N.m,為輕至中等負載的機器人關節提供高效的動力傳輸。
- 集成驅動器與 CAN 總線: 內建驅動板 (GDS34 或 GDZ34) 支援 CAN 通訊,簡化接線和網絡控制。
- 雙編碼器反饋: 驅動器上的 14 位編碼器和輸出軸上的第二個編碼器,提供準確的位置和速度反饋。
- 緊湊結構: 外徑僅 46 毫米,整體長度從 46.5 毫米(不含驅動器)到 51.5 毫米(含驅動器),實現密集的多關節佈局。
- 環境耐久性: IP54 防護等級,工作溫度範圍從 -20°C 到 +80°C,噪音水平低於 60 dB。
- 保護功能: 過熱、過壓和過載保護有助於在持續運行的機器人系統中維持安全、可靠的操作。
- 機械穩健性: 支持高達 75 N 的軸向負載和 300 N 的徑向負載,輸出軸的減速器回程為 15 弧分。
- 自定義剎車選項: 支持對需要在無電源時保持扭矩的關節進行自定義剎車集成。
如需技術支持、自定義或有關 GIM3510-8 小型機器人關節模塊的集成問題,請聯繫 https://rcdrone.top/ 或發送電子郵件至 [email protected]。
應用
- 類人機器人
- 機械手臂
- 外骨骼
- 四足機器人
- 自動導引車輛
- ARU 機器人
規格
| 參數 | 單位 | GIM3510-8 + GDS34 (SDC101) | GIM3510-8 + GDZ34 |
|---|---|---|---|
| 型號 | - | GIM3510-8 | GIM3510-8 |
| 驅動板型號 | - | GDS34 (SDC101) | GDZ34 |
| 額定電壓 | V | 24 | 24 |
| 電壓範圍 | V | 12–48 | 12–40 |
| 額定功率 | W | 98 | 60 |
| 額定扭矩 | N.m | 1.68 | 1.00 |
| 峰值扭矩 | N.m | 3.41 | 6.02 |
| 減速後額定轉速 | rpm | 430 | 535.5 |
| 減速後最大速度 | rpm | 529 | 564.6 |
| 額定電流 | A | 4.1 | 2.5 |
| 峰值電流 | A | 8.30 | 25.30 |
| 相位電阻 | 歐姆 | 0.48 | 0.48 |
| 相位電感 | mH | 0.31 | 0.31 |
| 速度常數 | rpm/V | 22.04 | 23.53 |
| 扭矩常數 | N.m/A | 0.44 | 0.32 |
| 極對數 | 對數 | 7 | 7 |
| 齒輪比 | - | 8:1 | 8:1 |
| 齒輪類型 | - | 行星齒輪 | 行星齒輪 |
| 減速齒輪材料 | - | 鋁 | 鋁 |
| 減速齒輪間隙 | 弧分 | 15 | 15 |
| 無驅動器的電機重量 | 克 | 247.6 | 247.6 |
| 有驅動器的電機重量 | 克 | 259.6 | 259.6 |
| 無驅動器的尺寸(直徑 x 長度) | 毫米 | Ø46 x 46.5 | Ø46 x 46.5 |
| 有驅動器的尺寸(直徑 x 長度) | 毫米 | Ø46 x 51.5 | Ø46 x 51.5 |
| 最大軸向負載 | N | 75 | 75 |
| 最大徑向負載 | N | 300 | 300 |
| 噪音 | dB | <60 | <60 |
| 通訊 | - | CAN | CAN |
| 輸出軸上的第二編碼器 | - | 是 | 是 |
| 防護等級 | - | IP54 | IP54 |
| 工作溫度 | °C | -20 到 +80 | -20 到 +80 |
| 編碼器解析度(驅動編碼器) | 位 | 14 | 14 |
| 獨立編碼器支持 | - | 否 | 否 |
| 自訂剎車支撐 | - | 是 | 是 |
手冊
詳細資訊

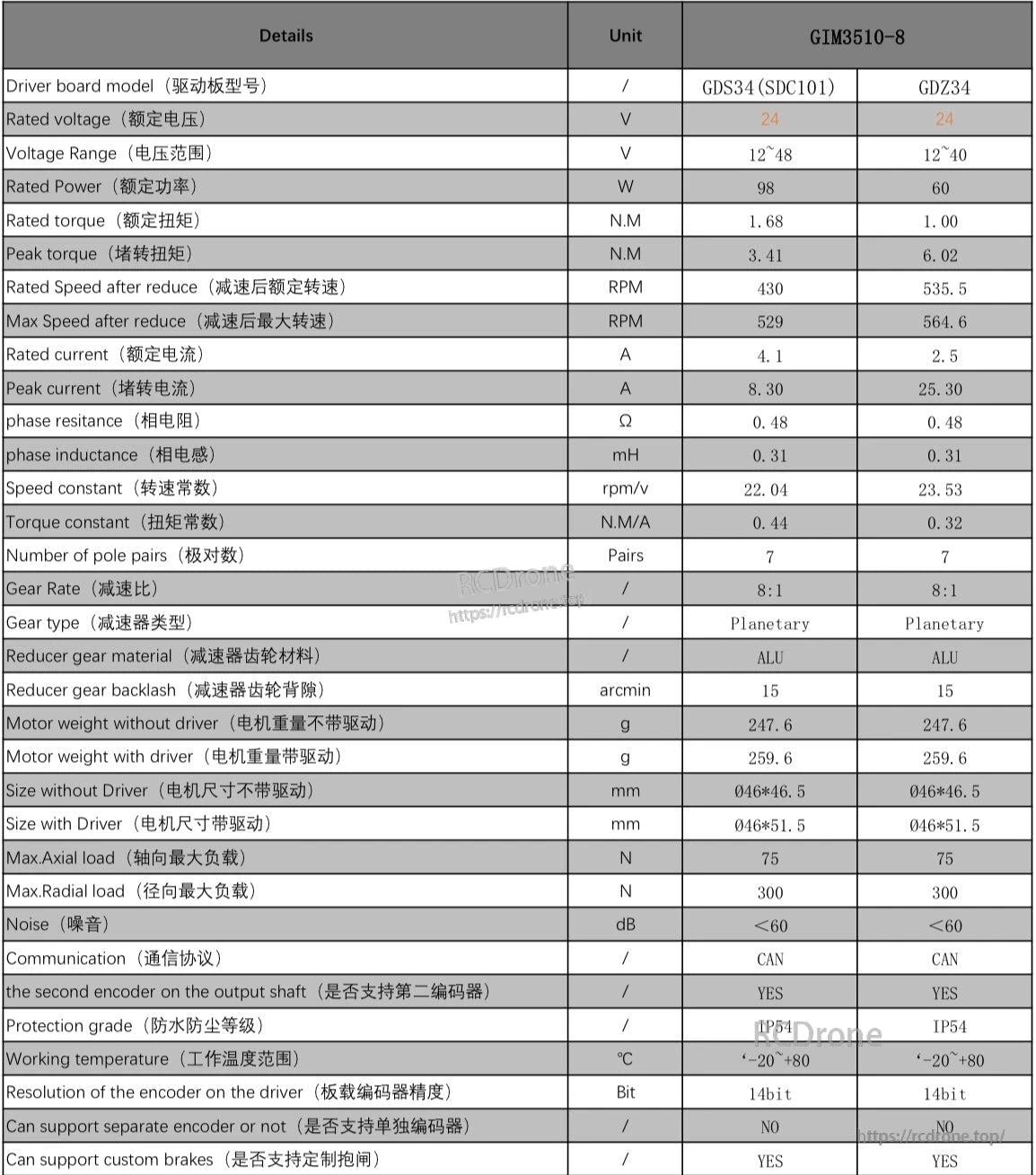
GIM3510-8 機器人關節規格比較 GDS34 和 GDZ34 驅動板。關鍵指標包括電壓、功率、扭矩、速度、電流、重量、尺寸、載重能力、噪音、通信、編碼器、防護等級、溫度範圍和自定義剎車支持。
Related Collections









