




Flywoo GOKU GM10 Nano V3 GPS模組,帶指南針,M10050 GNSS,2.6克,12x17x5毫米,6針
Flywoo GOKU GM10 Nano V3 GPS模組,帶指南針,M10050 GNSS,2.6克,12x17x5毫米,6針
FLYWOO
定價
$31.49 USD
定價
售價
$31.49 USD
單價
每
已包含稅額。
結帳時計算運費。
無法載入取貨服務供應情況
概述
Flywoo GOKU GM10 Nano V3 是一款設計用於輕量級 FPV/RC 構建的納米 GPS 模組,配備指南針。它具有 2.6 克的納米形狀因子、6 引腳墊連接器和即插即用的電纜,安裝時無需焊接。
根據提供的信息,GM10 V3 系列使用最新的 M10050 GNSS 芯片,與之前的 GM8 V2 相比,能更快地搜索衛星。如需設置幫助或兼容性問題,請聯繫 [email protected] or 訪問 https://rcdrone.top/ .
主要特點
- 納米尺寸和輕量:2.6 克
- 集成指南針
- 即插即用(無需焊接)
- 6 引腳墊連接器
- GPS 模組。三個模組。
兼容性說明
- 注意:GOKU GM10 V3 GPS 的芯片在提供的說明中被引用為 M1005。只有 Betaflight (BF) 4.3.x 固件可以使用 Ublox 協議。BF 4.2。x 和早期只能使用 NMEA協議。備註指出兩種協議之間沒有性能差異。
- BETAFLIGHT: 使用固件版本高於4.3.0.
- INAV: 使用最新的6.0.0 配置器, 和固件版本高於5.0.0.
規格
| 品牌 | FLYWOO |
| 型號 | GM10 NANO V3 GPS 帶指南針 |
| 尺寸 | 12mm*17mm*5mm |
| 重量 | 2。6g |
| 連接器 | 6針墊 |
| 晶片組 | M10050(第十代晶片) |
| 接收格式 | GPS、GLONASS、Galileo、北斗、QZSS 和 SBAS |
| 默認協議 | GPS、Galileo、北斗 |
| 頻率 | GPS L1、GLONASS L1、北斗 B1、SBAS L1、Galileo E1 |
| 通道 | 72個搜索通道 |
| 靈敏度(跟踪) | -162dBm |
| 靈敏度(重新獲取) | -160dBm |
| 支持速率 | 4800bps 到 921600bps(默認 115200bps) |
| 數據級別 | TTL 或 RS-232(默認 TTL 級別) |
| 數據協議 | BF4.3.X(UBLOX)/ BF4.2.X (NMEA) |
| 輸出頻率 | 1Hz-10Hz (預設 10Hz) |
| 操作限制 (高度) | 最大 50,000m |
| 操作限制 (速度) | 最大 500m/s |
| 操作限制 (加速度) | 小於 4g |
| VCC | 直流電壓: 3.3-5V |
| 操作溫度 | -40 °C ~ +85°C |
| 儲存溫度 | -40°C ~ +105°C |
| 指示燈 | PPS LED: 紅色。當 GPS 未固定時,PPS LED 亮起,當 GPS 固定時熄滅。 |
| 模組引腳 (文字) | RX, TX, 3.3-5V, GND |
| 指南針/GPS 標籤 (圖示) | T, R, G, V, C, D |
| 飛行控制器標籤 (圖示) | TX, RX, GND, 5V, SCL, SDA |
| GM10 NANO V3 (指南針) 標籤 (圖示) | SD-SC-V-G-RX-TX |
操作指南
指南針方向選項 (顯示)
- 默認
- 順時針 0°
- 順時針 90°
- 順時針 180°
- 順時針 270°
- 順時針 0° 翻轉
- 順時針 90° 翻轉
- 順時針 180° 翻轉
- 順時針 270° 翻轉
- 自定義
Betaflight GPS 和 GPS 救援模式設置 (顯示)
- 打開串口: GPS / 115200 波特率.
- 打開 GPS 開關並設置 UBLOX/NMEA 協議。
- 設置 RXLOSS 控制救援模式通道(示例顯示:AUX 2 GPS 救援 , 值 2000)。
- 選擇 GPS 救援模式選項(示例值顯示):角度 32; 初始高度(米) 50; 下降距離(米) 200; 最小回家距離(米) 100; 地面速度(米/秒) 20.00; 油門最小值 1100; 油門最大值 1600; 油門懸停 1280; 上升速率(米/秒) 5.00; 下降速率(米/秒) 1.50; 最小衛星數 5; 高度模式 最大高度; 合理性檢查 開.
包含內容
- 1x GM10 NANO V3 GPS 連同指南針
- 1x 100mm 電纜
- 1x 銅箔
詳細資訊
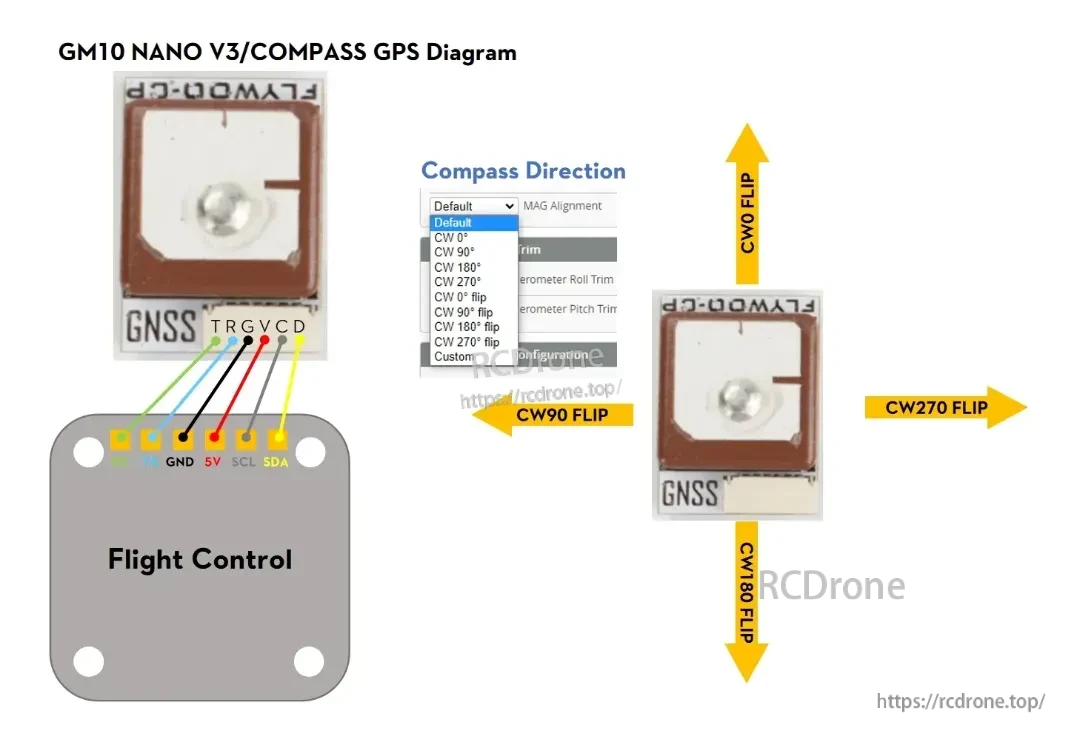
GM10 Nano V3 GPS 接線使用 TX/RX 加上 5V 和 I2C (SCL/SDA),並提供不同模組方向的指南針方向選項。

Flywoo GOKU GM10 Nano V3 GPS 透過 5V 和 GND 電源以及 UART TX/RX 連接到 飛行控制器,並可選擇性地使用 SDA/SCL 連接指南針。

Flywoo GOKU GM10 Nano V3 GPS 設計用於更快的衛星搜索,並支持追蹤超過 30 顆衛星。

將 GPS 串口設置為 115200 波特率,並啟用 GPS 開關,使用 UBLOX/NMEA 協議進行救援模式設置。

GPS 救援模式可以通過為 GPS 救援分配 AUX 通道並在 Betaflight 中調整返回主頁參數來設置。




