STM32 DIY 無人機套件 - 進階可編程開源無人機,支援C語言學習、研發及競賽
STM32 DIY 無人機套件 - 進階可編程開源無人機,支援C語言學習、研發及競賽
RCDrone
無法載入取貨服務供應情況
概述
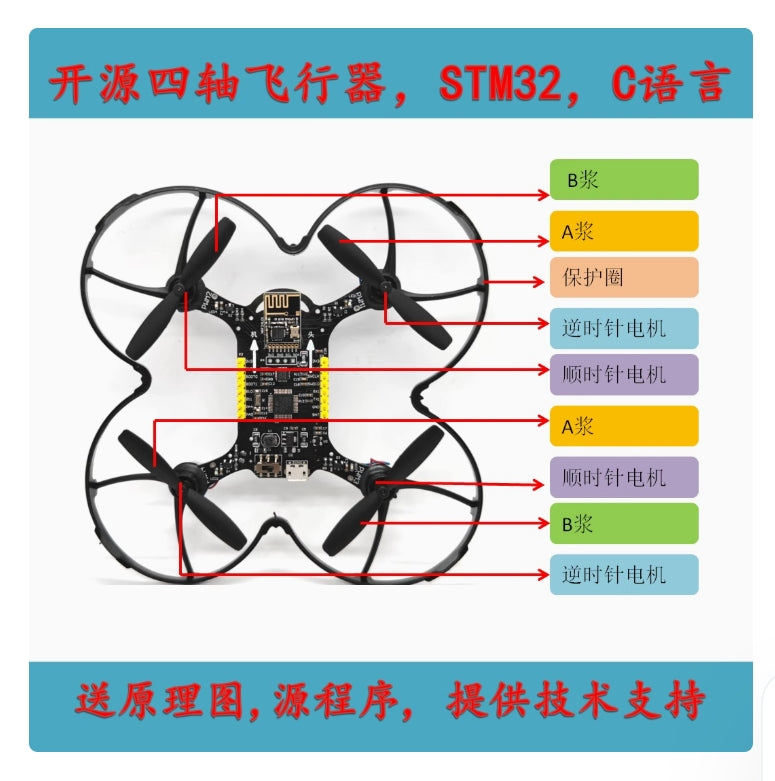
這款STM32 DIY 無人機套件是一個全面的開源平台,旨在讓學生、愛好者和開發者探索四旋翼飛行系統。該套件由STM32F103C8T6 微控制器驅動,支持C語言編程和先進的飛行控制算法,是學習、研發和競賽的絕佳工具。憑藉堅固的硬體、模組化設計和全面的開發資源,這款套件非常適合掌握無人機技術和嵌入式系統。
主要特點
- 可編程和開源:使用C語言和STM32標準庫完全自定義,並附有詳細註釋以便於學習。
-
高性能硬體:
- STM32F103C8T6 微控制器:72MHz(主控制器)和48MHz(遙控器)。
- MPU6050: 六軸陀螺儀和加速度計,確保穩定飛行。
- 集成電壓穩定器(662K 和 BL8530)及 MOSFET(SI2302),提供可靠的電源管理。
-
模組化和耐用設計:
- 包括一個720空心杯電機和減速齒輪,以確保高載重穩定性。
- 可更換的組件,便於維護和升級。
-
用戶友好的開發工具:
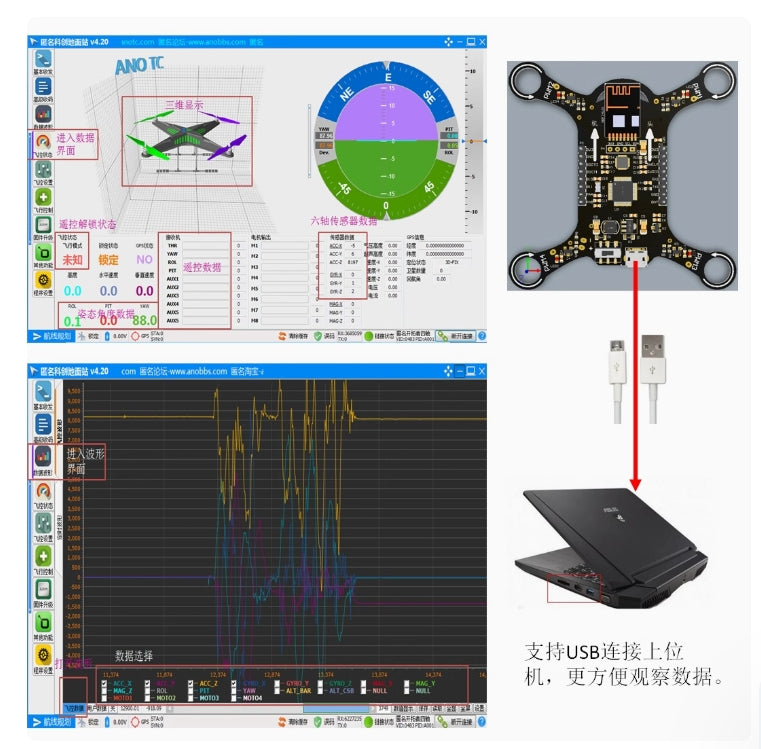
- 板載 USB 接口,用於數據監控和調試。
- 開源程序資源,包括 Keil MDK5 環境、源代碼和詳細教程。
-
穩定的飛行控制:
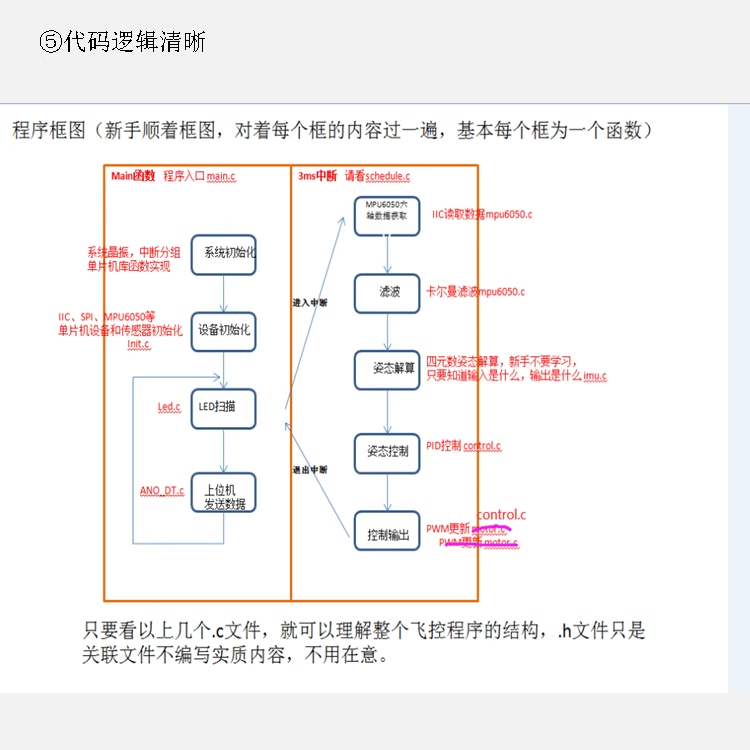
- 先進的 PID 控制和卡爾曼濾波,實現精確穩定。
- 支持前進、後退、左轉和右轉的方向控制。
規格
| 類別 | 描述 |
|---|---|
| 飛行時間 | 8分鐘(不含保護框架) |
| 充電時間 | 40分鐘 |
| 控制器範圍 | 室內:30米;室外:30米(建議在三層樓以下的建築物中使用) |
| 馬達 | 720空心杯 |
| 螺旋槳尺寸 | 55毫米 |
| 飛行控制器 | STM32F103C8T6 + MPU6050 + NRF24L01 |
| 重量 | 輕量框架以穩定飛行控制。 |
套件內容
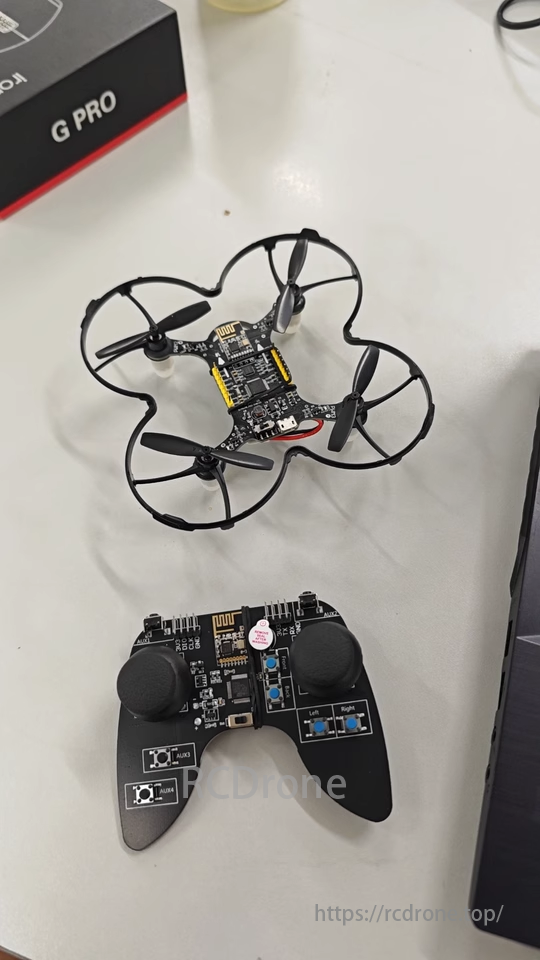
- 四旋翼框架 × 1
- 遙控器 × 1(8通道,4個搖桿 + 4個按鈕,帶蜂鳴器反饋)
- 備用螺旋槳 × 1 套
- USB 電池充電器 × 1
- 550mAh 主電池 × 1(可單獨購買額外電池)
- 550mAh 遙控電池 × 1
- 備用 720 空心杯馬達 × 1
附加開發功能
- 全面教程:包括詳細文檔、源代碼、數據表和測試視頻。
- 實時數據監控:板載 USB 支持通過上位機軟件直接檢查數據。
- 優化電源系統:電壓穩定器和獨立電源路徑確保平穩運行,無干擾。
- 二次開發準備好:非常適合進階 R&&D、飛行算法測試和 DIY 修改。
建議的操作和存儲指南
-
操作環境:
- 建議在室內或室外使用(最小 30 米範圍)。
- 明亮的環境以獲得最佳傳感器性能。
-
存儲建議:
- 存放在無塵或塑料密封的環境中。
- 定期充電以防止電池損壞。
- 用微纖維布輕柔地處理光學和激光傳感器。
優勢
- 易於閱讀,適合初學者的源代碼。
- 非常適合 DIY 自定義和實驗。
- 穩定的飛行性能,具有高可靠性。
這款STM32 DIY 無人機套件結合了尖端技術、實踐學習機會和堅固的模組化元件,是任何希望掌握無人機飛行系統和嵌入式編程的理想選擇。



STM32 開發板 T3K04-745 套件,配備 STM32 MCU、NRF2A LoI+ 和 STM3Z F1 O3C。包括 SWD 轉接器和 24C02 EEPROM。支持通過 IFI# 接口進行編程。
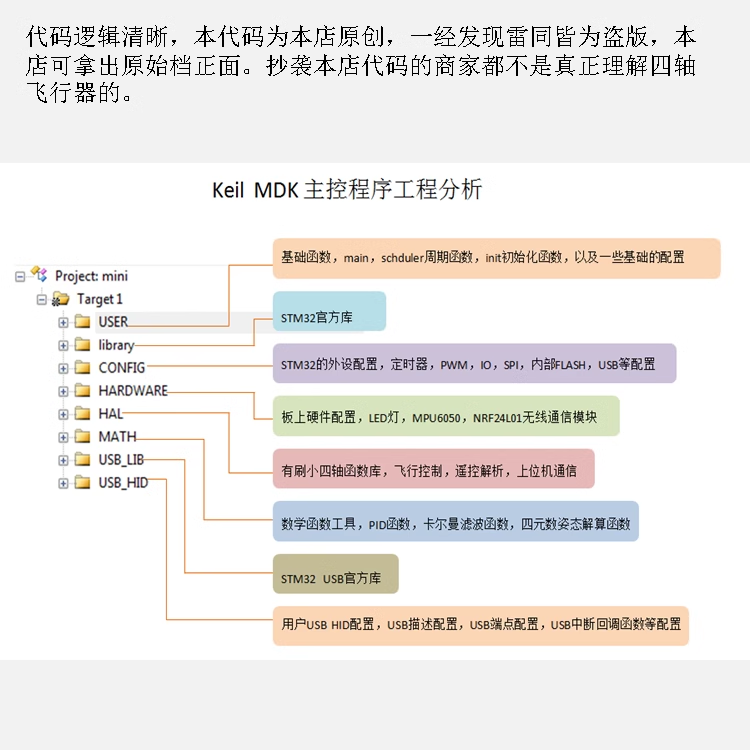
項目迷你目標 1:用戶 STM32 庫配置。該項目使用主調度器 JAMAEEI,初始化 MATH USB_LIB,利用 HAL 控制硬體元件如 LED、MPU6000、NRF24L01E。它還包括 USB_HID 和 WF03IA 用於 USB 通信。此外,它使用 PID、TR-103 和 Wt32.c 來實現 STM32 USB 功能。該項目有一些錯誤,包括 - USB 4623,usbpu@a038nz。
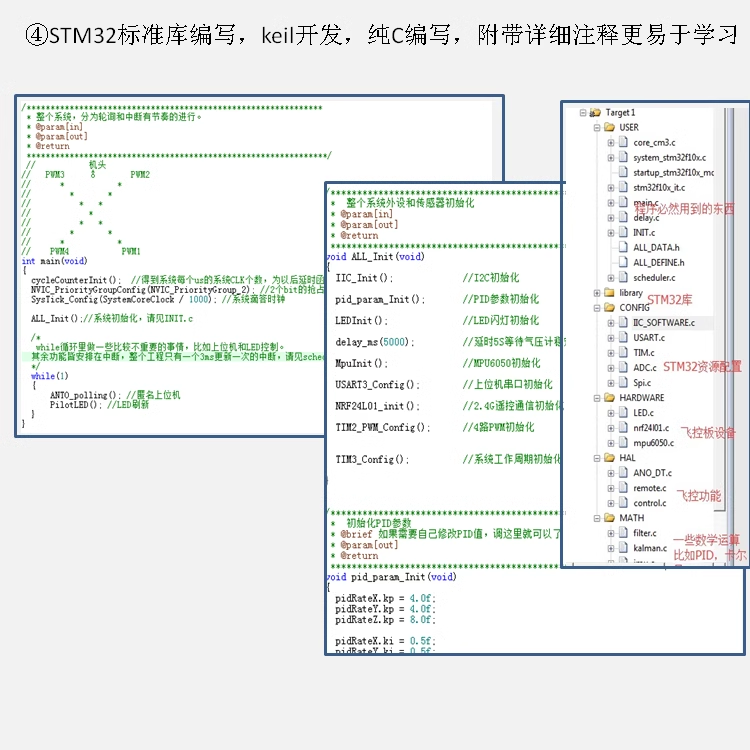
STM32 TMEF9AE,Kielte 模組,配備 2C4R 和 M14*E5+4A IC。針對 STM32 MCU 的系統開發目標硬體。包括 AL_Init、I2c Init、PID_Init、LED_Init、USART、TIM、ADC 和其他模組。
Xtreme Air Flow Technology TFAO 主要風扇用於 ZMS。功能包括排程和 Kpilstn Araer IIC-Dsl mpuboso.c EiR,配備 4Wz Rruald MELXES #TE#epu6o50 c MC、SPI、Mpugo5d。





Related Collections