Ti5 機器人 CRA-RI60-80-PRO-XX 集成機器人關節模塊 — 諧波驅動,24–48 V,CAN/EtherCAT,17 位編碼器
Ti5 機器人 CRA-RI60-80-PRO-XX 集成機器人關節模塊 — 諧波驅動,24–48 V,CAN/EtherCAT,17 位編碼器
Ti5 Robot
無法載入取貨服務供應情況
概述
Ti5機器人 CRA-RI60-80-PRO-XX 是一款緊湊型空心軸整合關節,適用於人形機器人、協作機器人和移動機械手。它結合了 超薄諧波減速器, 無框力矩電機, FOC伺服驅動, 和 絕對式磁編碼器 在一個模組中, 接近零間隙輸出、低噪音、高扭力密度。關節支持 能 或者 EtherCAT, 單或雙編碼器,以及 可選保持煞車. 有兩種長度可供選擇:標準 PRO-XX 和加長 PRO-XX-B (機身較長、轉子慣性較大、通孔較大)。
主要特點
-
一體式接頭:諧波減速器+力矩馬達+FOC驅動器+絕對值編碼器。
-
幾乎零反沖 在輸出端;平穩的低速控制和低雜訊。
-
空心軸設計 用於電纜/氣道穿過;多種減速比。
-
絕對編碼器,17位、斷電位置記憶;可選 雙編碼器 版本。
-
溝通: 能 或者 EtherCAT 可選。
-
力量: 24–48 伏,整合驅動器,300W馬達功率級。
-
可選保持煞車; IP/防水 &低溫 可客製化。
-
應用就緒 適用於萬向節、人形機器人、協作機器人、工業設備、巡邏機器人和海洋設備。
規格
電力 & 控制(由 PRO-XX/PRO-XX-B 共享)
-
馬達額定功率: 300 瓦
-
電源電壓: 24–48 伏特直流電
-
最大持續電流: 6.7 安;額定電流: 5個
-
相電阻: 0.33 Ω
-
扭力常數: 0.096牛·米/安
-
電感: 0.074 毫亨
-
極對數: 10
-
編碼器: 17位元絕對值;單/雙編碼器選項
-
公共汽車: 能 (標準)或 EtherCAT (選項)
機械(空心軸)
-
通孔(PRO-XX): Ø15毫米
-
通孔(PRO-XX-B): Ø18毫米
-
長度 (PRO-XX): 70.4±0.5毫米; 重量 ≈1.01公斤;轉子慣量 ≈441 克·平方厘米
-
長度 (PRO-XX-B): 92.9±0.5毫米; 重量 ≈1.17公斤;轉子慣量 ≈595 克·平方厘米
-
安裝方式:正面螺栓圈(空心輸出);諧波減速器一體成型
-
選項:保持煞車;單/雙編碼器;CAN/EtherCAT;防水 &低溫封裝
減速器選項 &放大器性能(輸出端)
反沖:低至 10–20 角秒 取決於比率。
| 減速比 | 啟動/停止峰值扭力(N·m) | 最大平均負載扭力(N·m) | 2000 rpm/速比時的額定扭力(N·m) | 峰值轉速(rpm) | 額定轉速@½額定扭力(rpm) | 反沖(角秒) |
|---|---|---|---|---|---|---|
| 51:1 | 四十二 | 三十二 | 19.8 | 82 | 68 | 20 |
| 81:1 | 53 | 33 | 27.5 | 51 | 43 | 20 |
| 101:1 | 66 | 49 | 三十 | 41 | 三十四 | 10 |
| 121:1 | 66 | 49 | 三十 | 三十二 | 24 | 10 |
筆記:
• 以上資料取自 CRA-RI60-80-PRO-XX 的產品說明書, PRO-XX-B。
• PRO-XX-B 共享相同的扭矩/速度表;它具有更大的通孔和更高的慣性以及更長的機身。
應用
-
人類生物 &服務機器人:肩膀、手肘、臀部、膝蓋、踝關節,具有高扭力密度。
-
協作機器人手臂:精確的低間隙軸,可實現平穩的力控制。
-
萬向節 & 雲台裝置:安靜、穩定的低速跟踪,具有絕對位置記憶。
-
工業設備 &和 AGV/AMR 機械手:適用於狹小空間的緊湊型整合式驅動裝置。
-
電力巡檢機器人; 海洋/船上設備 (具有防水選項)。
細節
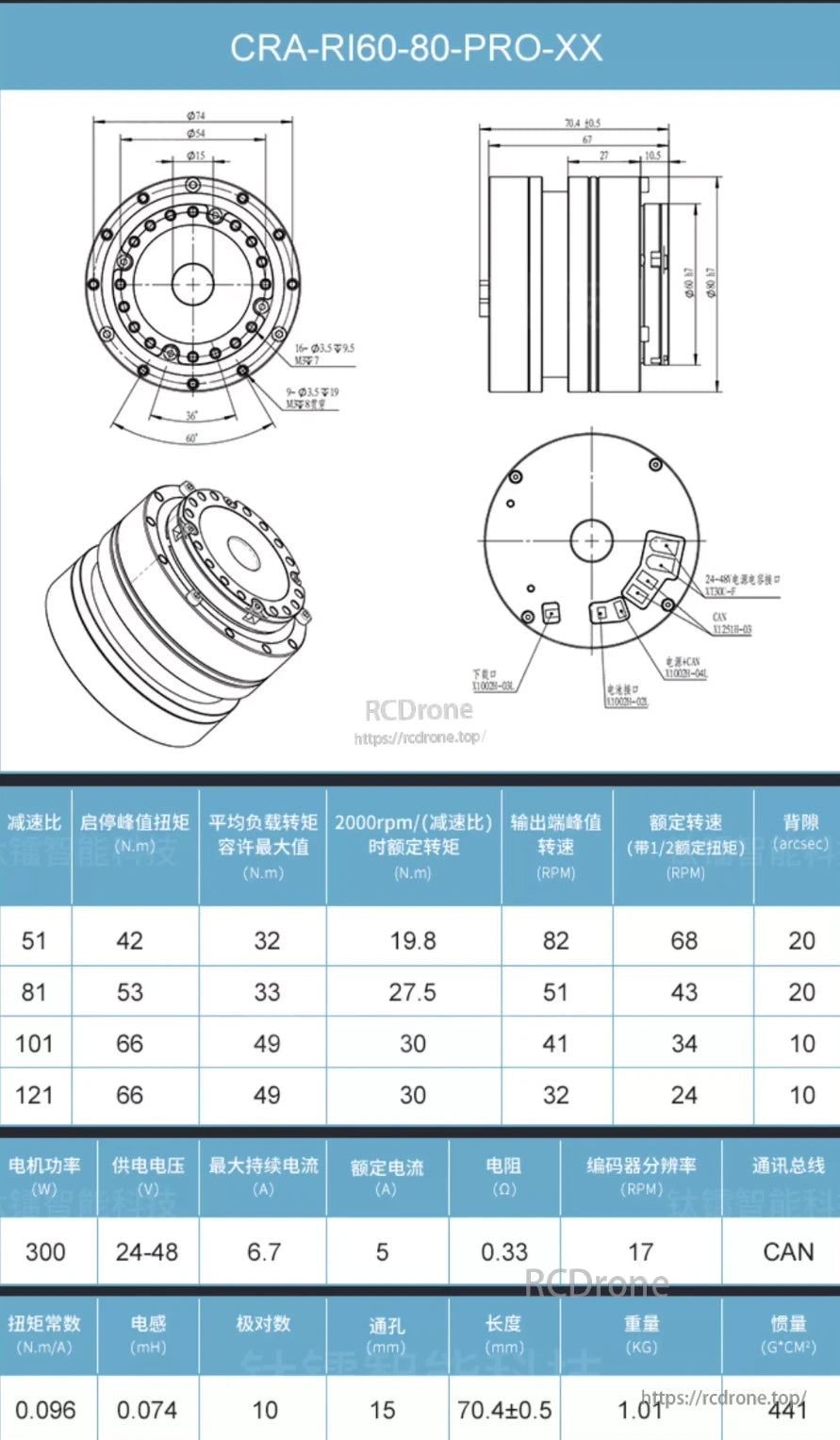
CRA-RI60-80-PRO-XX機器人關節模組規格:300W電機,24-48V輸入,CAN總線,17 CPR編碼器,長度70.4mm,重量1.01kg,多種齒輪比,提供扭矩和速度資料。
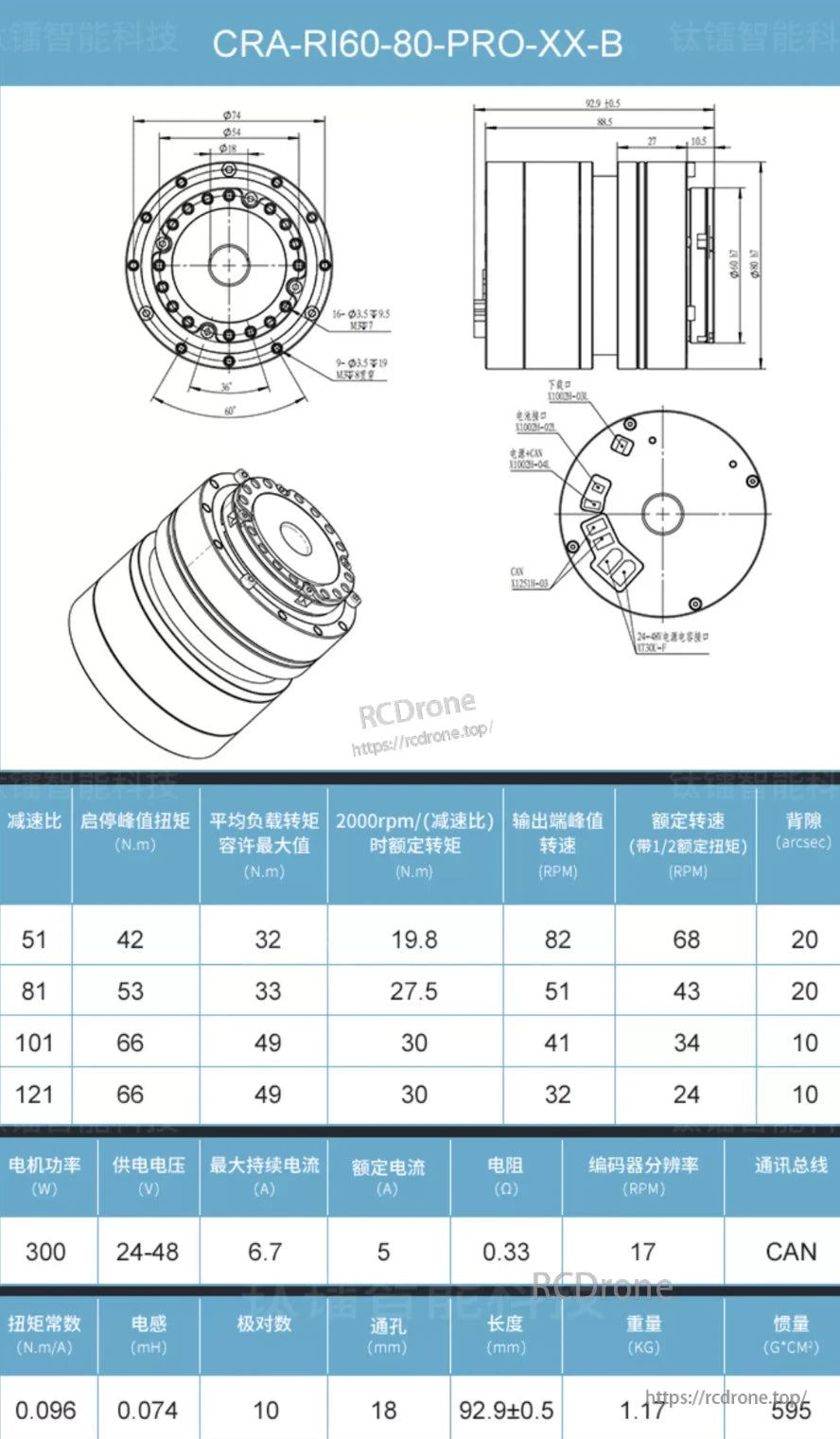
CRA-RI60-80-PRO-XX-B 機器人關節模組,配備 300W 馬達、24-48V 電源、CAN 通訊、17 RPM 編碼器解析度和多種齒輪比。主要規格包括扭力、速度、電流和尺寸。