








WitMotion HWT601-AGV-485 IMU RS485 Modbus,IP67,200Hz-六軸加速度計陀螺儀傾角儀,支援ROS/Matlab
WitMotion HWT601-AGV-485 IMU RS485 Modbus,IP67,200Hz-六軸加速度計陀螺儀傾角儀,支援ROS/Matlab
WitMotion
無法載入取貨服務供應情況
概述
WitMotion HWT601-AGV-485 是一款專為AGV機器人、無人機和自主平台設計的6軸姿態/航向傳感器。它結合了3軸加速度 + 3軸角速度,並通過RS485 (Modbus)以高達200 Hz的頻率輸出3軸角度&和四元數。該模塊具有卡爾曼動態過濾、高精度轉台校準、自動/手動偏差獲取、斷電時航向保存的備用電源,以及IP67防水/防塵外殼。它還支持多級級聯(最多32個單元)以實現同步姿態測量。
主要特點
-
高精度角度:XY精度 0.1°;Z精度 0.1° (HWT601-AGV-485) / 0.15° (WT601-AGV-485)。
-
穩定的陀螺儀偏差: XY 5°/h; Z 2°/h (HWT601-AGV-485) / 5°/h (WT601-AGV-485).
-
寬輸入 9–36 V, 工作電流 ≈ 8 mA @12 V.
-
RS485 Modbus, 波特率 4,800–230,400 bps.
-
取樣: 請求–響應讀取高達 200 Hz.
-
算法: 卡爾曼濾波融合和專用AGV 方向算法.
-
軟體: 免費的 PC 套件,具有實時儀表板、曲線圖、3D 可視化(車輛/球體/立方體/平面)、配置(偏差、角度參考、加速度校準、比例因子)、數據記錄 &及直接保存,以及Matlab 匯入。
-
開發者友好:示例程序和代碼支持 ROS, Linux, C/C#, Python.
-
環境:IP67,-40~80 °C(顯示-40~85 °C的表格變體)。
-
級聯:最多支持32個傳感器通過RS485進行同時姿態測量。
安裝指南
-
將傳感器安裝在緊固、平坦、穩定的表面上;不平整的基座會導致角度誤差(見圖1–2)。
-
保持傳感器軸與測量軸平行;避免交叉角度(見圖3–4)。
-
此型號僅支持水平安裝。
軟體 &與可視化
-
強大的數據儀表板(角度、速率、加速度、磁場、四元數、端口、溫度、電壓等)。
-
配置面板:波特率、設備地址、自動偏置獲取、Z軸重置、加速度校準、角度參考、手動正/負校準和比例因子。
-
3D模型用於直觀的運動監控和 實時曲線,並具有動態更新功能。
-
原始數據視圖和文件保存以便於收集; Matlab分析導入支持。
-
ROS IMU INS 演示:姿態追蹤可視化和姿態數據顯示(偏航/滾轉/俯仰、角速度、線性加速度)。
html
規格
介面 &及性能
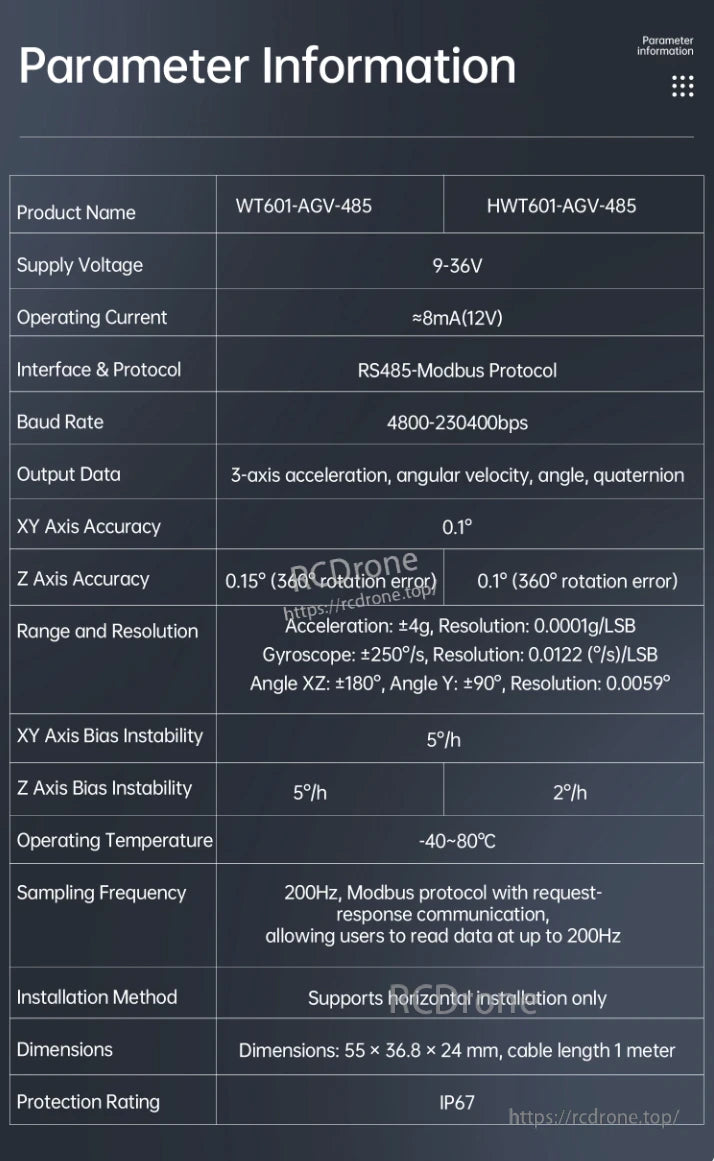
| 項目 | HWT601-AGV-485 | WT601-AGV-485 |
|---|---|---|
| 介面 / 協議 | RS485 / Modbus | RS485 / Modbus |
| 波特率 | 4,800–230,400 bps | 4,800–230,400 bps |
| 輸出數據 | 3軸 加速度、角速度、角度、四元數 | 相同 |
| 取樣頻率 | 最高 200 Hz(請求–回應) | 最高 200 Hz |
| XY 角度精度 | 0.1° | 0。 1° |
| Z 角度精度 (360° 旋轉誤差) | 0.1° | 0.15° |
| 加速度範圍 / 分辨率 | ±4 g / 0.0001 g/LSB | 相同 |
| 陀螺儀範圍 / 分辨率 | ±250 °/s / 0.0122 (°/s)/LSB | 相同 |
| 角度範圍 / 分辨率 | X軸: ±180°; Y軸: ±90° / 0.0059° | 相同 |
| 陀螺儀偏置不穩定性 (XY / Z) | 5°/h / 2°/h | 5°/h / 5°/h |
| 溫度係數 (XYZ) | 0.002°/°C | 0.002°/°C |
電氣、機械 &和環境
-
供電電壓: 9–36 V; 工作電流: ≈ 8 mA (12 V)
-
尺寸: 55 × 36.8 × 24 mm; 電纜長度: 1 m
-
保護: IP67
-
操作溫度: -40~80 °C (表格變體也顯示 -40~85 °C)
-
安裝: 僅限水平安裝
-
級聯: 最多 32 個單元 在 RS485
應用領域
AGV/AMR 和移動機器人、無人機/UAV、無人物流車輛及自動駕駛感知模塊。
型號命名 & 選擇
-
HWT601-AGV-485 – 更高的 Z 軸精度 (0.1°) 和更低的 Z 偏差不穩定性 (2°/h)。
-
WT601-AGV-485 – 標準 Z 軸規格 (0.15°, 5°/h)。
當 Z 軸精度至關重要時,請選擇 HWT601。
詳細資訊

高精度 6 軸姿態傳感器,具備 3 軸加速度、角速度、角度和四元數。具備 AGV 頭向算法、IP67 防護、卡爾曼濾波、自動偏差獲取和 PC 軟件支持。
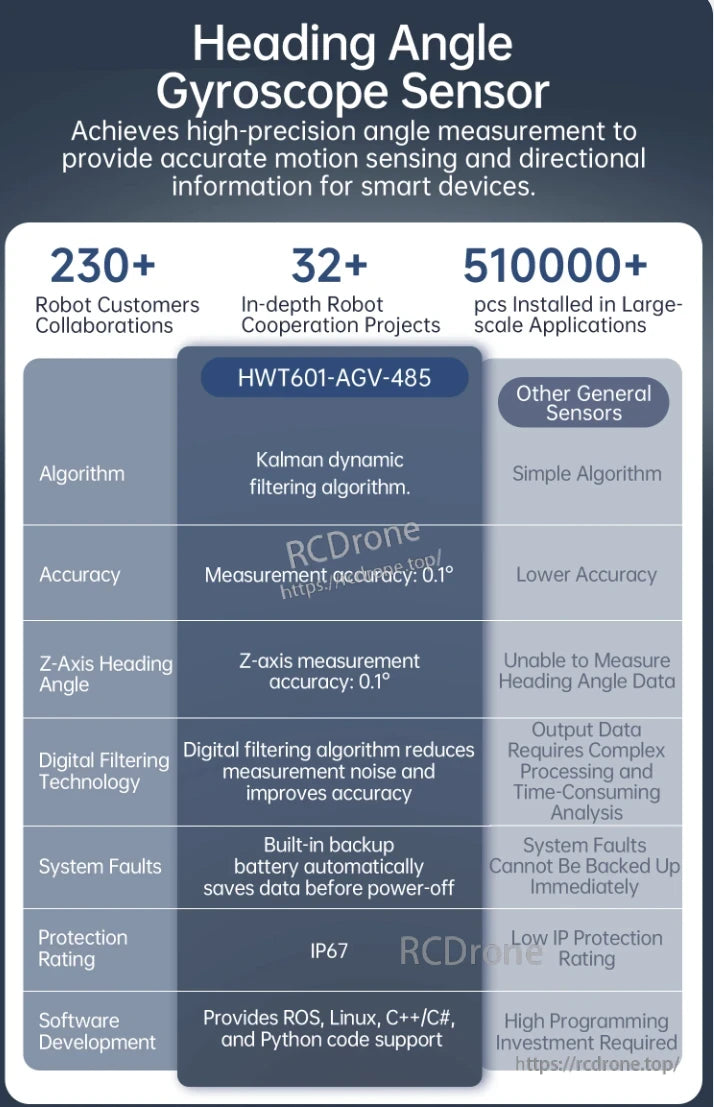
頭向角陀螺儀傳感器 HWT601-AGV-485 提供高精度角度測量,具備卡爾曼濾波、0.1° 精度、數字噪聲減少、IP67 防護,並支持 ROS、Linux、C++ 和 Python。超過 230 個機器人合作和 510,000+ 安裝。
HWT601-AGV-485 IMU 提供 9-36V 供電,RS485-Modbus,200Hz 取樣,±4g 加速度,±250°/s 陀螺儀,IP67 等級,-40~80°C 操作。提供準確、高解析度的三軸數據。
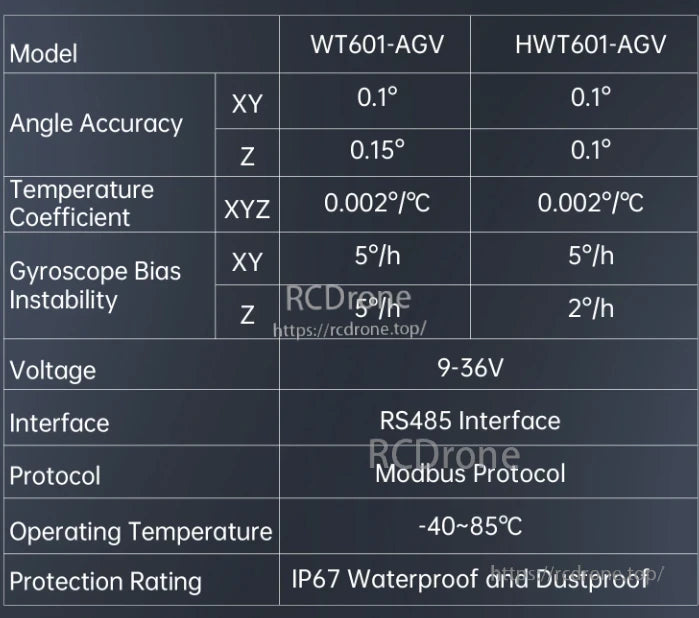
HWT601-AGV IMU 在 XY 和 Z 軸上提供 0.1° 的角度精度,XYZ 的溫度係數為 0.002°/°C。陀螺儀偏置不穩定性為 5°/h (XY) 和 2°/h (Z)。它在 9–36V 下運行,使用 RS485 和 Modbus,並在 -40 到 85°C 的範圍內運作。IP67 等級,提供防水和防塵保護。WT601-AGV 變體具有類似的規格,但 Z 軸精度為 0.15°,Z 軸偏置不穩定性為 5°/h。這兩個型號在苛刻環境中確保可靠的性能。
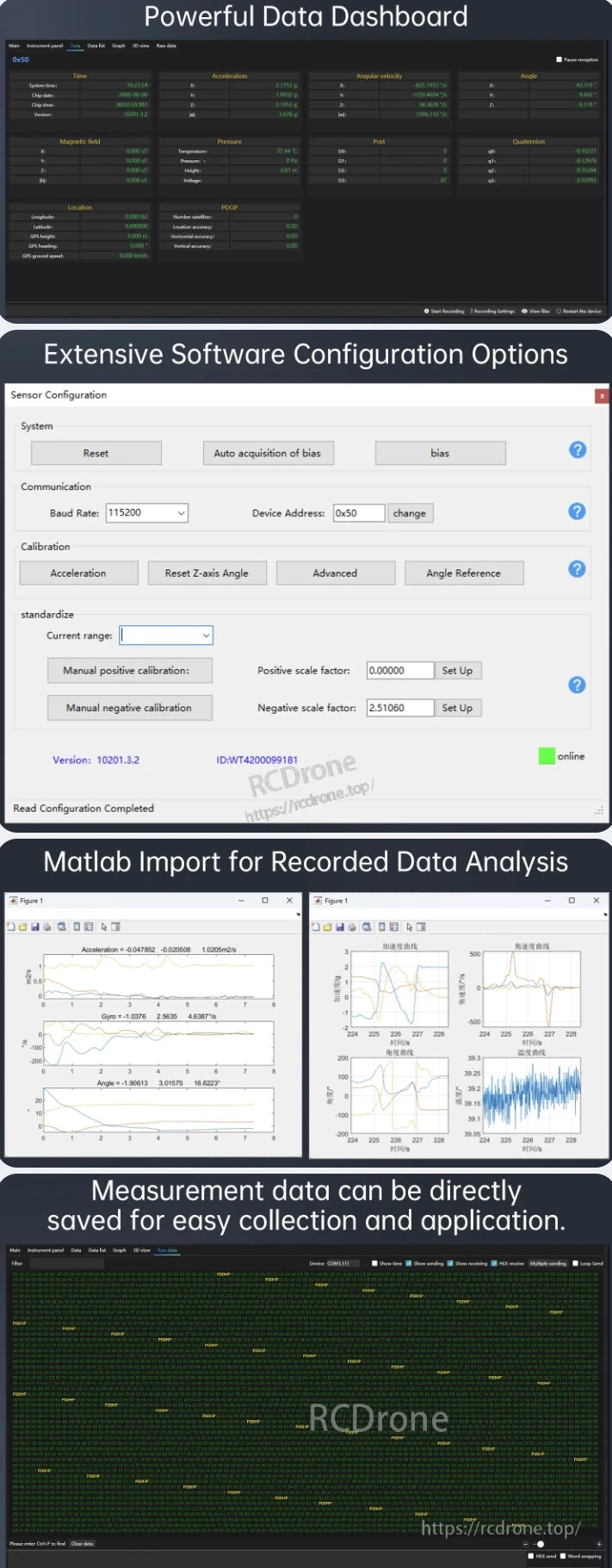
強大的數據儀表板,提供實時傳感器讀數,廣泛的軟件配置,支持 MATLAB 導入進行分析,並可直接保存數據以便於收集和應用。
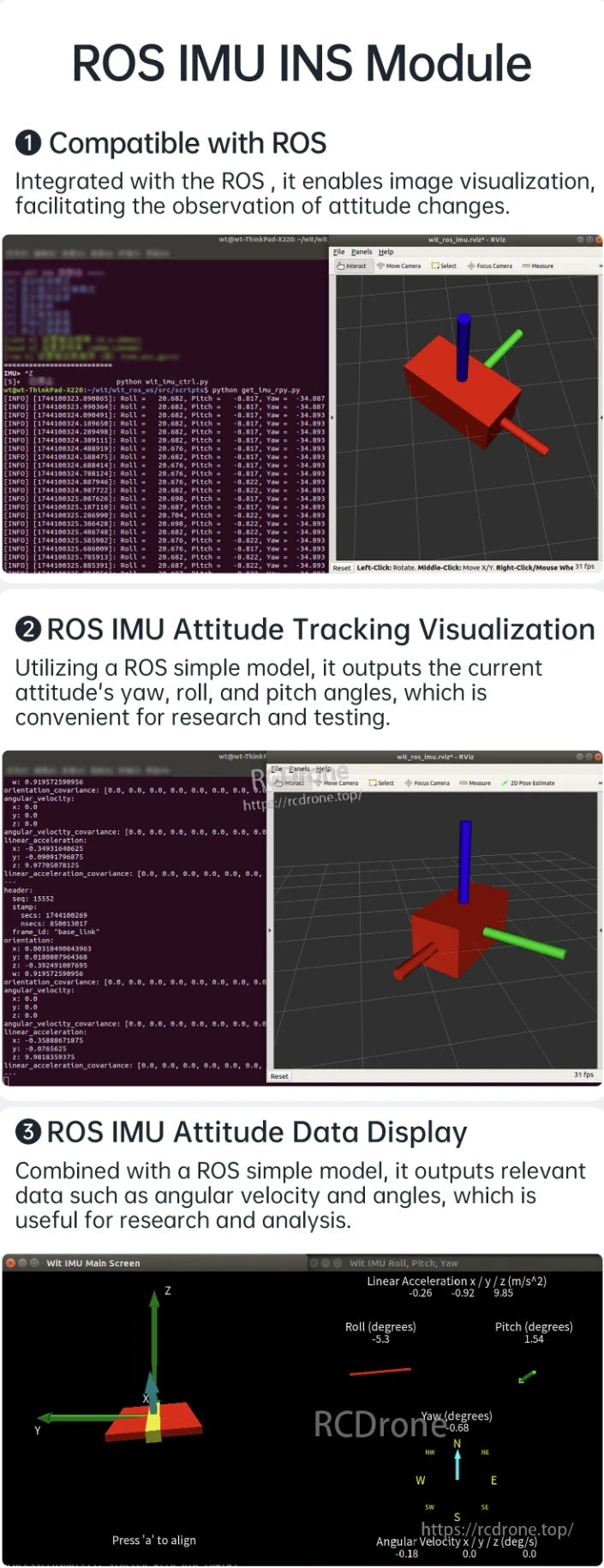
ROS IMU INS 模組提供 ROS 兼容性,能夠可視化姿態追蹤,並顯示實時的滾轉、俯仰、偏航、角速度和線性加速度,適用於研究和分析。
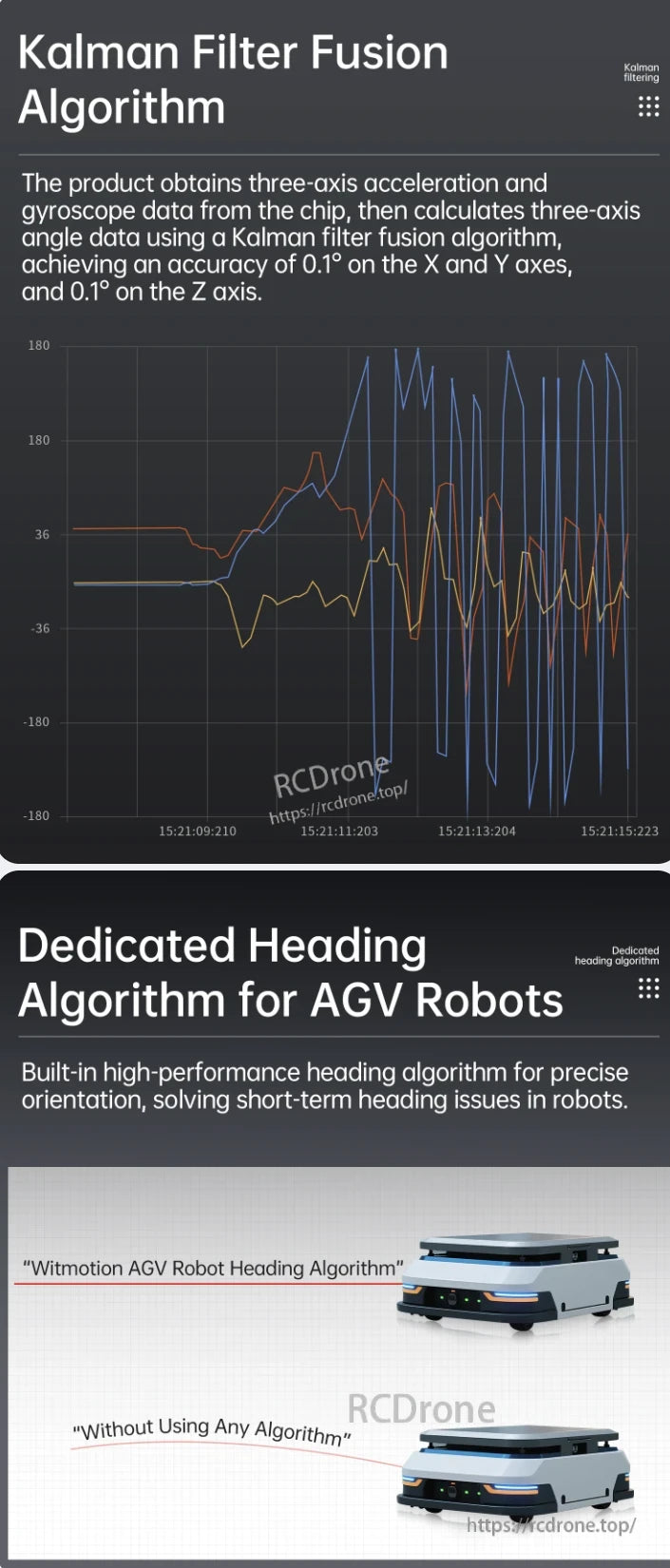
WitMotion HWT601 AGV IMU 使用卡爾曼濾波融合技術,提供精確的 3 軸角度數據,精度達 0.1°。其專用的航向算法確保機器人方向穩定,顯著提升性能,相較於沒有此類算法的系統。
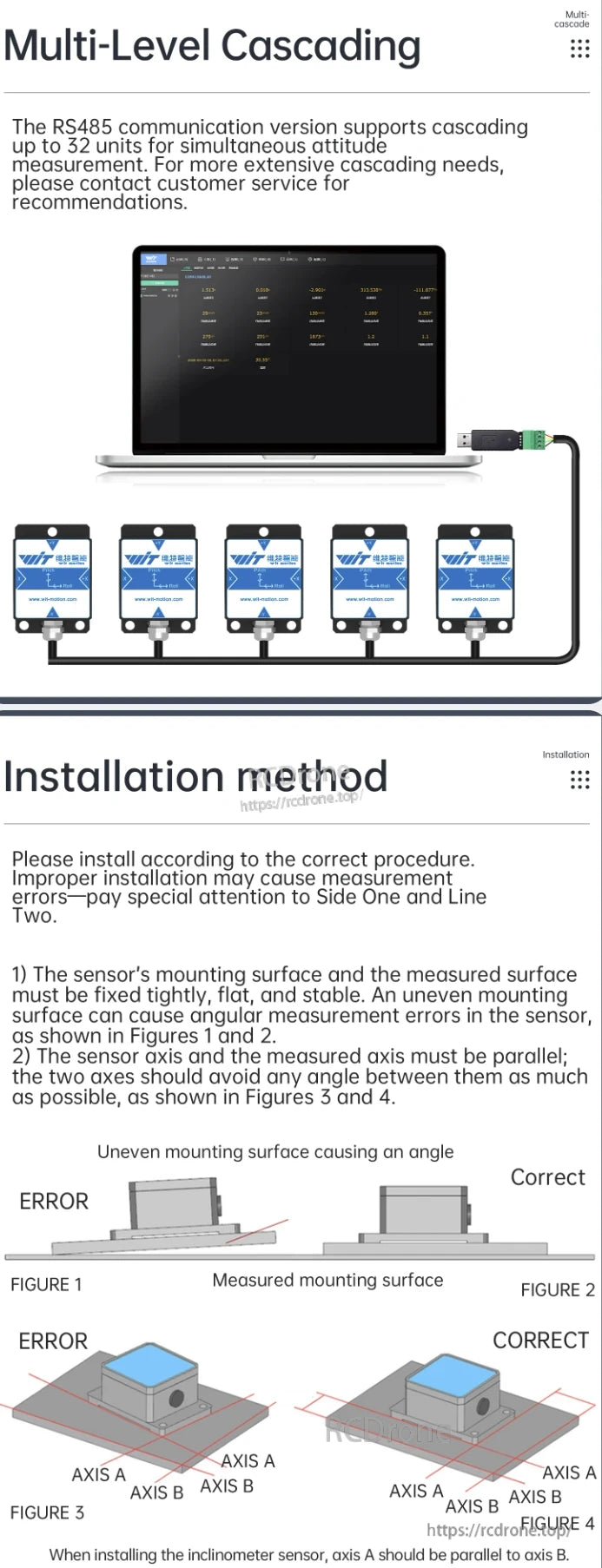
WitMotion HWT601 AGV IMU 支持通過 RS485 連接最多 32 個級聯單元進行姿態測量。確保平坦、穩定的安裝和對齊的軸以保證準確性。
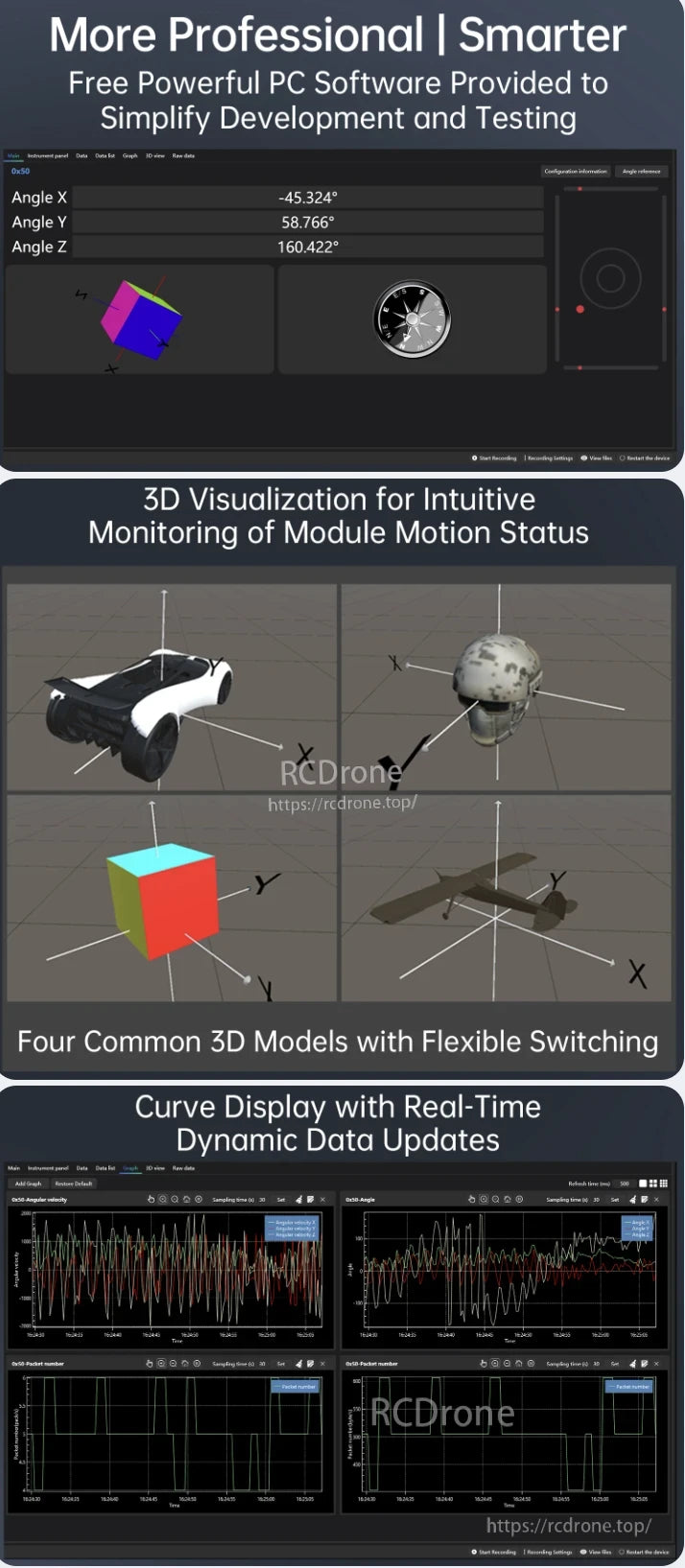
WitMotion HWT601 AGV IMU 的專業 PC 軟件提供實時 3D 可視化、角度監控和動態曲線顯示。功能包括直觀的運動追蹤、靈活的模型切換以及實時數據更新,以提高開發和測試的效率。
支持文檔包括STM32、Arduino、51 UART、Windows C++和Matlab的示例程序,以幫助開發人員通過教程和代碼示例應用該產品。
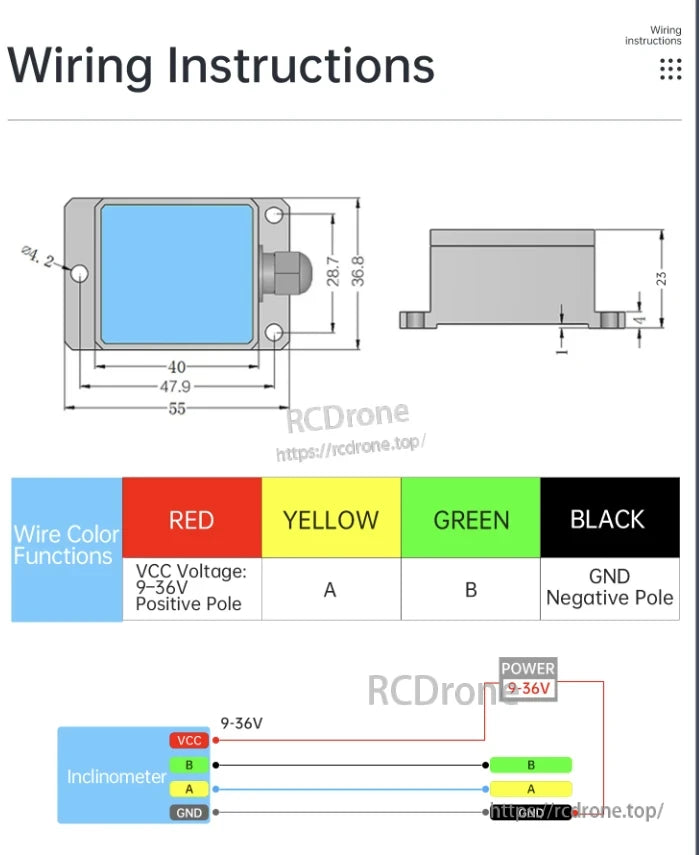
WitMotion HWT601 AGV IMU接線指南:紅色(9-36V)、黃色(A)、綠色(B)、黑色(GND)。提供尺寸和連接圖。

WitMotion HWT601 AGV IMU適用於無人機、自動駕駛、移動機器人和無人物流車輛。








