WitMotion WT61 IMU (MPU6050) – 6軸加速度計+陀螺儀,帶角度輸出,Kalman AHRS,TTL串口,20/100 Hz,3.3–5V,適用於Arduino/Raspberry Pi/PC
WitMotion WT61 IMU (MPU6050) – 6軸加速度計+陀螺儀,帶角度輸出,Kalman AHRS,TTL串口,20/100 Hz,3.3–5V,適用於Arduino/Raspberry Pi/PC
WitMotion
無法載入取貨服務供應情況
概述
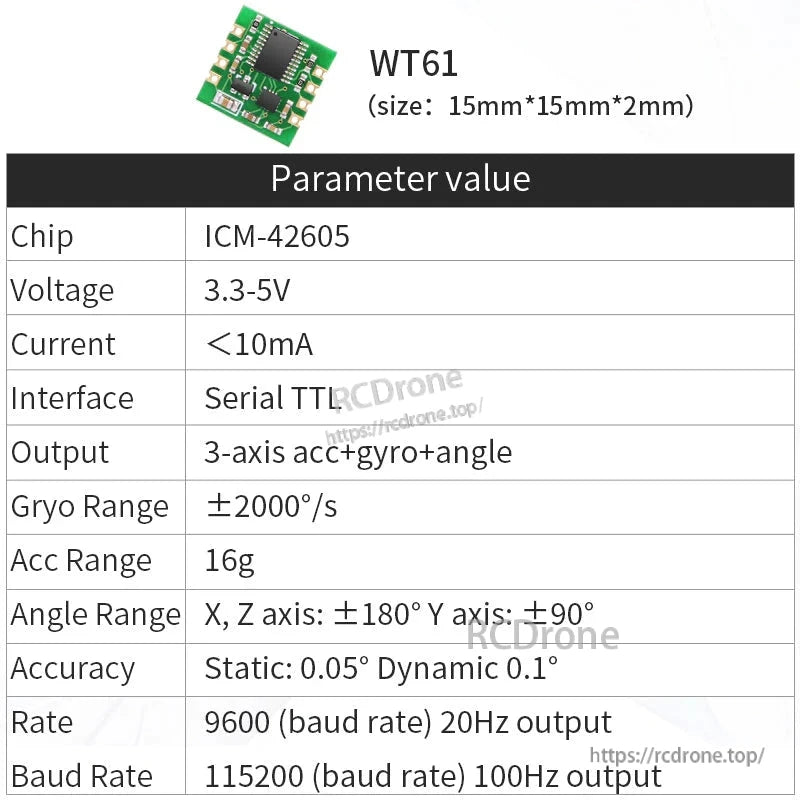
WitMotion WT61 是一款 6 軸 MEMS 姿態傳感器,輸出 3 軸加速度、3 軸角速度和融合角度(滾轉/俯仰/偏航)。它使用 48 MHz MCU,內嵌 IMU(MPU6050,根據型號命名),並結合 WitMotion 的動態融合 + 卡爾曼濾波技術,提供高穩定性、低噪聲和精確的角度結果。該模塊通過 串行 TTL 進行通信,體積小巧(15.24 × 15.24 × 2 mm,約 1 g),便於嵌入物聯網設備、機器人、移動機械、結構監測、消費電子產品和虛擬現實設備中。
主要特點
-
3 個輸出:加速度、角速度和角度(姿態)。
-
融合算法:動態融合 + 卡爾曼濾波;衛星級姿態算法傳承;角度精度 0.05°(靜態),0.1°(動態)。
-
高品質硬體: 48 MHz 核心 MCU,穩定的電源晶片,金浸銅墊,嵌入式 MEMS 感測器。
-
小巧輕便:& 15.24 × 15.24 × 2 mm,約 1 克; 支援水平/垂直安裝。
-
可選擇的數據速率 &和波特率: 20 Hz / 100 Hz 回報率; 9600 / 115200 bps。
-
Android 應用程式 + Windows 軟體: 實時繪圖、錄製、原始數據查看、TXT 匯出、3D 演示查看器,以及豐富的配置(帶寬、輸出速率、放置、閾值、睡眠、Z 軸重置)。
-
SDK &和範例: Matlab、Python、樹莓派、STM32、ROS、Arduino、C/C++。
-
文檔 &和工具: 數據表、手冊、MiniIMU.exe、CH340/CP2102 驅動程式、演示視頻。
-
質量 &和支持:工廠校準報告顯示; RoHS, CE, ISO 9001.
技術規格
| 項目 | 詳細信息 |
|---|---|
| 型號 / 品牌 | WT61 / WitMotion |
| 供電電壓 | 3.3 V ~ 5 V |
| 電流 | < 10 mA |
| 介面 | 串行TTL |
| 輸出內容 | 3軸加速度、3軸角速度、角度 |
| 加速度範圍 | ±2/±4/±8/±16 g (自適應) |
| 陀螺範圍 | ±2000 °/s |
| 角度範圍 | X, Z: ±180°; Y: ±90° |
| 角度精度 | X/Y靜態 0.05°; 動態 0.1° |
| 穩定性(偏差) | 加速度: 0.01 g; 陀螺: 0.05 °/s; 角度 (XY): 0.01° |
| 退貨率 | 20 Hz / 100 Hz |
| 波特率 | 9600 / 115200 bps |
| 加速度解析度 | ±2 g: 0.061 mg/LSB (16384 LSB/g); ±4 g: 0.12 mg/LSB (8192 LSB/g); ±8 g: 0.25 mg/LSB (4096 LSB/g); ±16 g: 0.5 mg/LSB (2048 LSB/g) |
| 尺寸 / 重量 | 15.24 × 15.24 × 2 mm (0.6″ × 0.6″ × 0.08″) / ~1 g |
| 操作溫度 | –40 °C 至 +85 °C |
| 軸定義 | 笛卡爾座標,右手法則 |
| 安裝 | 水平或垂直 |
引腳配置 & 機械
板邊界 (mm): A = 15.24, B = 15.24, C = 2.54, D = 12.7, E = 2.
引腳:
| # | 名稱 | 功能 |
|---|---|---|
| 1 | D0 | NC 保留 |
| 2 | VCC | 3.3–5 V |
| 3 | RT | 串行數據 輸入,TTL 電平 |
| 4 | TX | 串行數據 輸出,TTL 電平 |
| 5 | GND | 接地 |
| 6 | SWIM | SWIM 數據接口 |
| 7 | D2 | NC 保留 |
| 8 | VCC | 3.3–5 V |
| 9 | SCL | NC 保留 |
| 10 | SDA | NC 保留 |
| 11 | GND | 接地 |
| 12 | D3 | NC 保留 |
MCU 接線(圖示): TTL 串行連接主 MCU,TX↔RX 交叉連接(VCC, TX, RX, GND)。
軟體、應用程式 &和工具
-
Android 應用程式: 通過 USB-to-TTL + 手機 OTG 連接;實時繪圖顯示加速度/陀螺儀/角度;錄製按鈕;模組選單(3 軸 / 6 軸 / 9 軸 / BLE5.0 / WT901-WIFI);豐富的配置頁面(加速度校準、安裝方向、檢索速率、測量帶寬、靜態檢測閾值、模式選擇)。
-
Windows PC (MiniIMU.exe): 實時姿態儀表,實時曲線(“穩固的數據測量”),數據存儲 &和導出(原始和解析數據到TXT/CSV格式),配置菜單(波特率115200,模式=串行,方向選擇,帶寬e.g., 94 Hz,睡眠,重置Z軸至0°)。
-
3D演示: 可視化傳感器運動;提供3D源代碼(如所示)。
-
測試夾具: 可選的 即插即用夾具 用於無需焊接的接線(單獨出售)。
算法 &和性能
-
WitMotion算法 × 卡爾曼濾波器: 來源於 航空航天衛星姿態確定 方法;結合動力融合、數字濾波、狀態估計;提供所述的 0.05°/0.1° 角度精度和優秀的偏差穩定性/低噪音(顯示的圖表和徽章)。
典型應用
物聯網設備、環境監測、建築結構保護、機器人技術&和自動化、石油&和能源、移動機械、礦業、消費電子產品、虛擬現實設備。
合規性&和支持
-
顯示的證書:校準報告、RoHS、CE、ISO 9001。
-
比較卡註釋:出貨前工廠測試,提供SDK,12個月保固,來自WitMotion R&D的終身技術支持。
註釋&和配件
-
包含: WT61 模組。
-
可選配件: USB轉TTL轉換器、手機OTG適配器、亞克力測試夾具夾具。
-
使用右手坐標約定,並遵循軟件中顯示的水平/垂直安裝方向以獲得最佳精度。
詳細資訊

WitMotion WT61 IMU 提供 0.05度的俯仰精度、數字濾波、融合算法,並包括加速度、陀螺儀、角度、振動、MCU 和濾波功能。

WitMotion WT61 IMU 提供三軸加速度、陀螺儀和角度輸出。它支持 3.3V-5V、低電流、串行TTL、±2/4/8/16g 自適應範圍、高精度、緊湊尺寸、輕重量和寬溫範圍。

WitMotion WT61 IMU 提供高精度的卡爾曼濾波,認證包括 RoHS、CE、ISO-9001。特點包括48MHz MCU、MEMS傳感器、穩定的電源芯片和金浸銅接口。

WitMotion算法 x 卡爾曼濾波器。WitMotion算法源自航空航天衛星姿態確定算法,結合卡爾曼濾波和運動動態融合。角度精度:X、Y軸:0.05°(靜態)、0.1°(動態)。圖表顯示隨時間變化的角度數據,藍色、紅色和黃色線條代表不同的測量或濾波輸出。時間戳範圍從15:21:09:210到15:21:15:223。縱軸範圍從-180到180度。

WitMotion WT61 IMU適用於物聯網、環境監測、機器人、自動化、採礦、橋樑、虛擬現實設備和工業應用。

WitMotion IMU提供高精度、穩定性、緊湊尺寸、優越的元件、SDK、工廠測試和終身支持。它包括卡尔曼滤波、融合算法和12个月的保修,性能优于其他产品。

WitMotion WT61 IMU 具有12针布局,包括 VCC、GND、TX、RX、SCL、SDA、SWIM 和保留端口;包括毫米的尺寸细节。

WitMotion WT61 IMU 通过 USB 连接到 OTG 适配器,以便于智能手机数据查看和记录。多功能 Android 应用程序显示实时传感器数据,包括角度、加速度和时间戳,并提供配置和数据记录选项。

WitMotion WT61 IMU 提供简单的设置、即插即用功能和实时姿态测量,带有角度读数。

WitMotion WT61 IMU 提供校准、实时测量和数据导出。以 TXT 格式显示和存储加速度、角速度、磁场和原始数据。

3D 演示直觀地顯示傳感器運動。SDK 支持 Matlab、Python、Raspberry Pi、STM32、ROS、Arduino 和 C++/C#。TTL 串行連接與 MCU;TX 和 RX 交叉連接。

3D 演示通過汽車、頭盔、立方體和無人機模型可視化傳感器運動。SDK 支持 Matlab、Python、Raspberry Pi、STM32、ROS、Arduino 和 C++/C#。通過 TTL 連接串行連接 MCU 和模塊,TX 和 RX 交叉連接。

IMU 測試包括 3 軸轉台、振動掃描、極端溫度、老化和高溫評估。


WitMotion WT61 IMU 提供 20-100Hz 的回報率,3.3-5V 的電壓,並感測加速度、角度和陀螺儀。支持 TTL 接口,與 Android、PC、MCU 和 Arduino 兼容。