WitMotion WT901B AHRS (MPU9250) 10軸IMU含氣壓計 & 傾斜感測器,±16g加速度計,±2000°/s陀螺儀,卡爾曼濾波,UART/I²C,0.2–200 Hz輸出
WitMotion WT901B AHRS (MPU9250) 10軸IMU含氣壓計 & 傾斜感測器,±16g加速度計,±2000°/s陀螺儀,卡爾曼濾波,UART/I²C,0.2–200 Hz輸出
WitMotion
無法載入取貨服務供應情況
概述
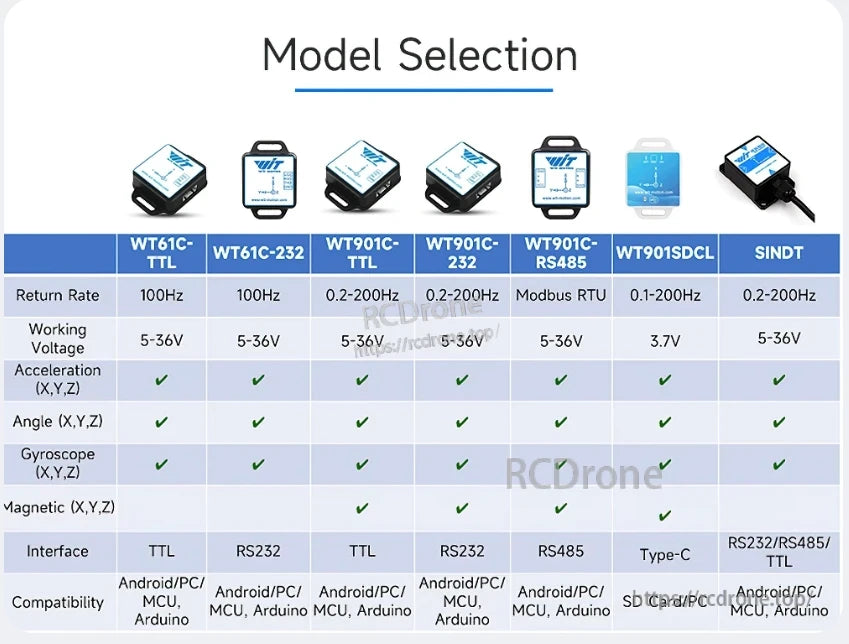
WitMotion WT901B AHRS (MPU9250) 集成了三轴加速度计、三轴陀螺仪、三轴磁力计和气压计,以提供角度、加速度、角速度、磁场、气压和高度。配备48 MHz MCU和LDO调节,以及内部融合 + 卡尔曼滤波器算法,提供低噪声、稳定的输出,适用于机器人、结构监测、移动机械和虚拟现实/消费设备。
主要特征
-
10轴IMU + 气压计,具备高度计算(相对精度 ±0.06 hPa)
-
角度精度:X/Y 0.05°(静态),0.1°(动态);偏航 1°(校准,低干扰)
-
可配置输出 0.2–200 Hz; 啟動 ≈ 1000 毫秒
-
介面: UART (4800–230400 bps), I²C (開漏; 需要 4.7 kΩ 上拉電阻)
-
供電 3.3–5.5 V,典型 12 mA @5 V,待機 15 µA
-
堅固:−40–85 °C 操作,20,000 g 抗震性
-
免費的 Windows 軟體(實時曲線,記錄到 TXT),可視化磁性校準,3D 演示(源代碼可按要求提供)
-
認證:校準報告,RoHS,CE,ISO9001
滾轉/俯仰角規格
| 參數 | 條件 | 典型 |
|---|---|---|
| 範圍 | — | X: ±180°,Y: ±90° |
| 傾斜 | 靜態 / 動態 | 0.1° / 0.5° |
| 解析度 | 水平 | 0.0055° |
| 溫度漂移 | −40–85 °C | ±0.5–1° |
航向 (偏航) 規格
| 項目 | 狀態 | 典型 |
|---|---|---|
| 範圍 | — | Z: ±180° |
| 解析度 | 水平 | 0.0055° |
| 精度& | 9軸 (動態/靜態) | 1° (已校準,遠離干擾) |
| 6軸 (靜態) | 0.5° 積分累積誤差 |
傳感器技術規格
加速度計
| 範圍 | 解析度 | RMS 噪聲 (100 Hz) | 靜態漂移 | 溫度漂移 | 帶寬 |
|---|---|---|---|---|---|
| ±16 g | 0.0005 g/LSB | 0.75–1 mg-rms | ±20–40 mg | ±0.15 mg/°C | 5–256 Hz |
陀螺儀
| 範圍 | 解析度 | RMS 噪聲 (100 Hz) | 靜態漂移 | 溫度漂移 | 帶寬 |
|---|---|---|---|---|---|
| ±2000 °/s | 0.061 (°/s)/LSB | 0.028–0.07 (°/s)-rms | ±0.5–1 °/s | ±0.005–0.015 (°/s)/°C | 5–256 Hz |
磁力計 &和氣壓計
| 磁力計範圍 | 磁力計解析度 | 氣壓計範圍 | RMS 噪聲 | 相對精度 |
|---|---|---|---|---|
| ±2 高斯 | 0.0667 m高斯/LSB | 300–1100 hPa | 0.5 Pa-RMS | ±0.06 hPa |
模組 &和電氣
| 項目 | 最小 | 默認 | 最大 |
|---|---|---|---|
| 輸出速率 | 0.2 Hz | 10 Hz | 200 Hz |
| 輸入電壓 | 3.3 V | 5 V | 5.5 V |
| 操作電流 (5 V) | — | 12 mA | — |
| 睡眠電流 (5 V) | — | 15 µA | — |
| 操作溫度 | −40 °C | — | 85 °C |
| 儲存溫度 | −40 °C | — | 100 °C |
尺寸 &和引腳配置
尺寸 (mm): A 15.24 × B 15.24 × C 2.54 × D 12.7 × E 2
軸: X→右, Y→上, Z→從 PCB 向外 (右手法則)
引腳 (1–12):
D0, VCC(3.3–5 V), RX(TTL 輸入), TX(TTL 輸出), GND, D1(支持 GPS), D2(X+ 警報/重置), VCC, SCL(Y+ 警報), SDA(Y− 警報), GND, D3(X− 警報)
連接性 &和工具
-
UART TX↔RX 交叉連接到 MCU
-
I²C 在 SCL/SDA 上有 4.7 kΩ 上拉電阻
-
外部 GPS (NMEA-0183) 接線以構建 GPS-IMU 導航 (輸出緯度/經度、高度、航向、速度、位移)
軟體 &和開發套件
Windows PC 套件用於配置、校準 (加速度/磁場/角度/高度)、帶寬/速率選擇,以及原始/曲線記錄。示例資源包括 Matlab, Python, Raspberry Pi, STM32, ROS, Arduino, C/C#; CH340/CP2102 驅動程式; Android 應用程式; 演示視頻; Manual.pdf &和 Datasheet.pdf.
應用
物聯網感測、環境&及橋樑監測、機器人&及自動化、叉車和移動機械、採礦、消費電子產品、虛擬實境裝置。
詳細資訊

具成本效益的AHRS氣壓計提供Z軸角度、高精度的傾斜和氣壓測量,還有加速度、陀螺角度、磁高和氣壓測量。

WitMotion WT901B AHRS IMU包括加速度計、陀螺儀、磁力計和氣壓計。提供±16g、±2000°/s、±2高斯、300-1100hPa。高解析度、低噪音、寬頻帶、溫度穩定性範圍-40°C至+85°C。

AHRS IMU WT901B提供±180°的滾轉/俯仰/偏航,0.0055°解析度,1°精度,9軸演算法,UART/IIC,200Hz輸出,-40°C至85°C的溫度範圍,3.3V-5.5V輸入。
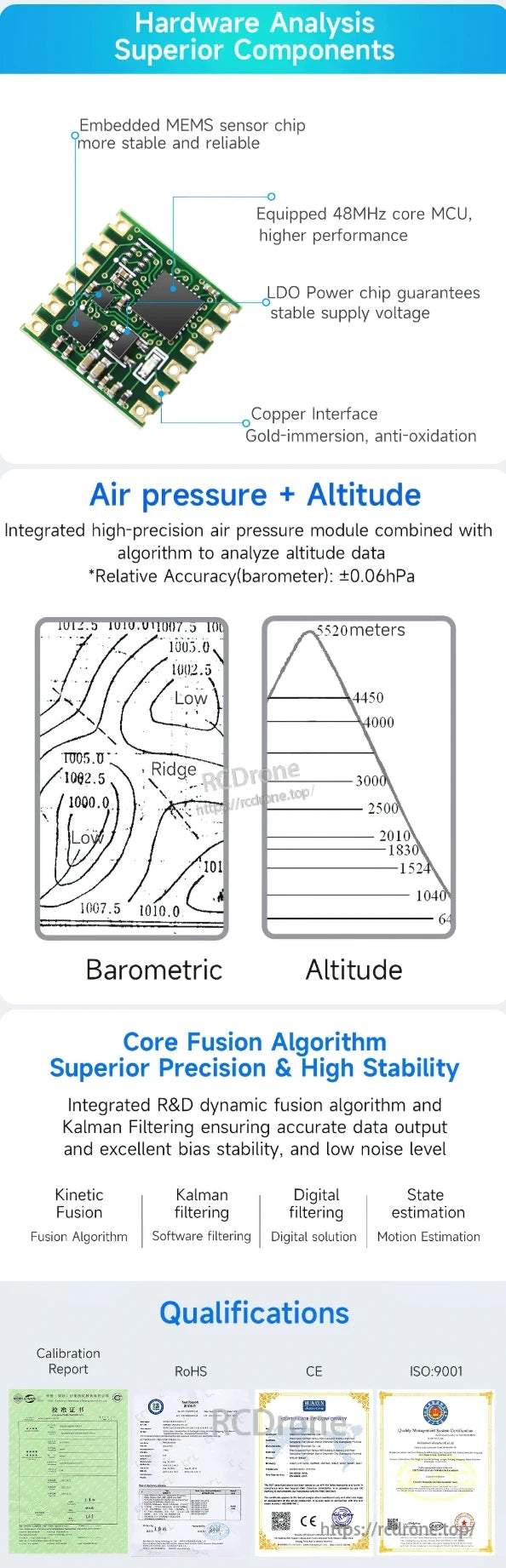
WT901B AHRS IMU 擁有 MEMS 感測器、48MHz MCU、LDO 電源晶片和金浸銅介面。它提供 ±0.06hPa 的壓力精度,穩定的融合算法,並符合 RoHS、CE 和 ISO:9001 標準。

AHRS IMU WT901B 使用 WitMotion 算法,搭配卡爾曼濾波器以實現高角度精度。適用於物聯網、虛擬實境、機器人、礦業、橋樑和環境監測。
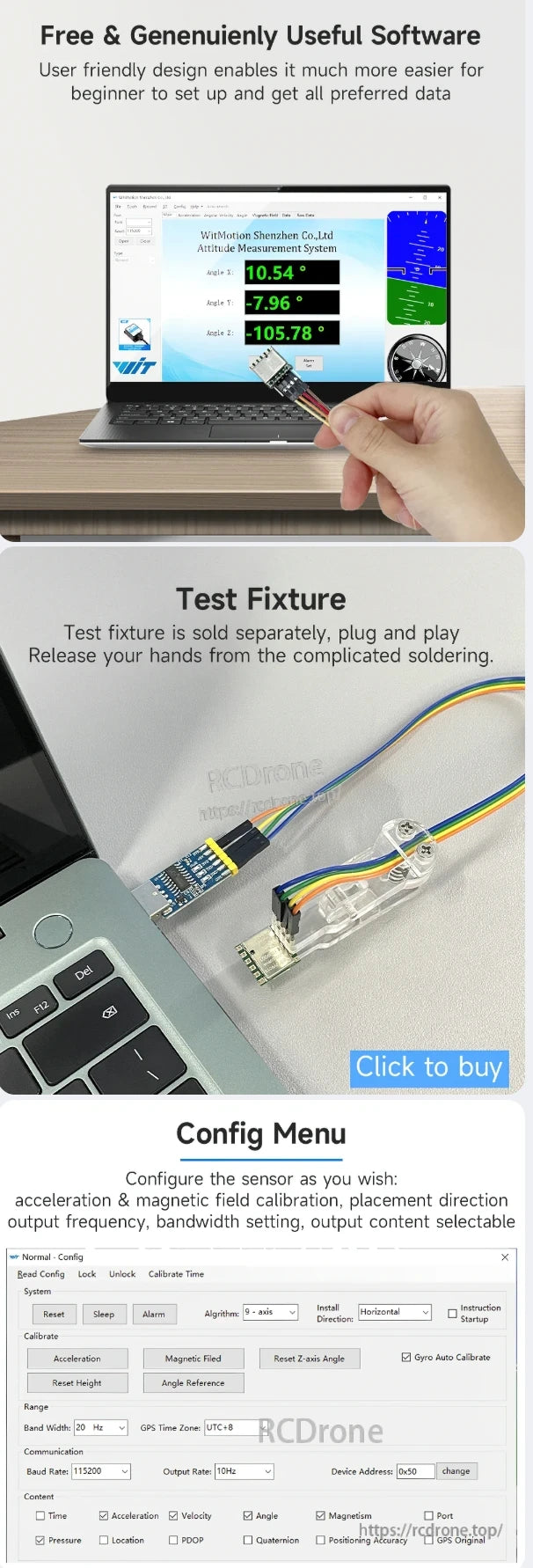
AHRS IMU WT901B 提供免費、使用者友好的軟體、即插即用的測試裝置,以及可配置的設置以進行校準、輸出和精確的姿態測量。
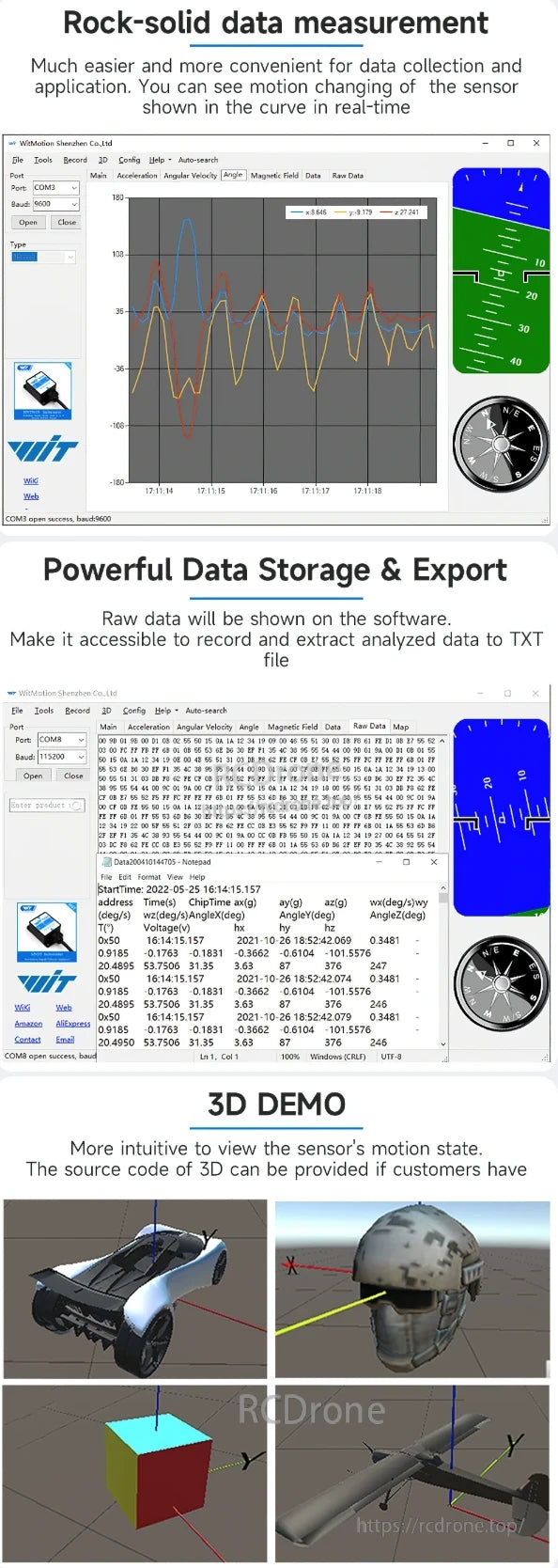
WT901B AHRS IMU 提供實時數據測量、強大的存儲和導出到 TXT 文件的功能,以及直觀的 3D 動作可視化。其特點包括加速度、角速度、磁場數據和指南針顯示,以便進行精確的感測器監控。

AHRS IMU WT901B 提供視覺磁性校準、TTL/IIC MCU 連接、GPS 兼容性。輸出緯度、經度、高度、航向、速度、位移以供導航使用。
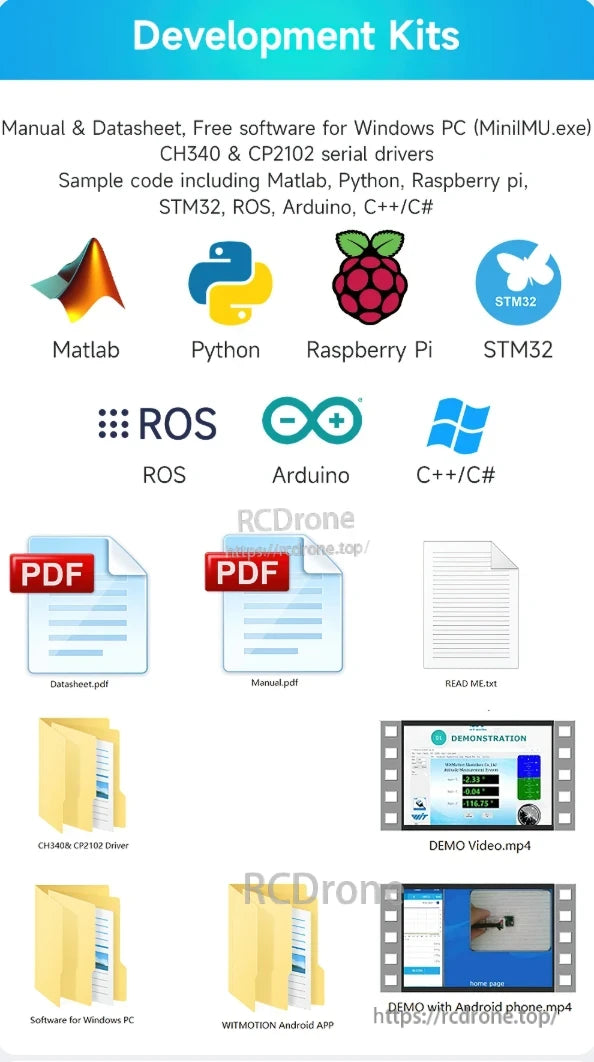
開發套件包括手冊、數據表、Windows 軟件、CH340 &和 CP2102 驅動程序、Matlab、Python、Raspberry Pi、STM32、ROS、Arduino、C++/C# 的示例代碼,以及 Android 和 PC 的演示視頻。
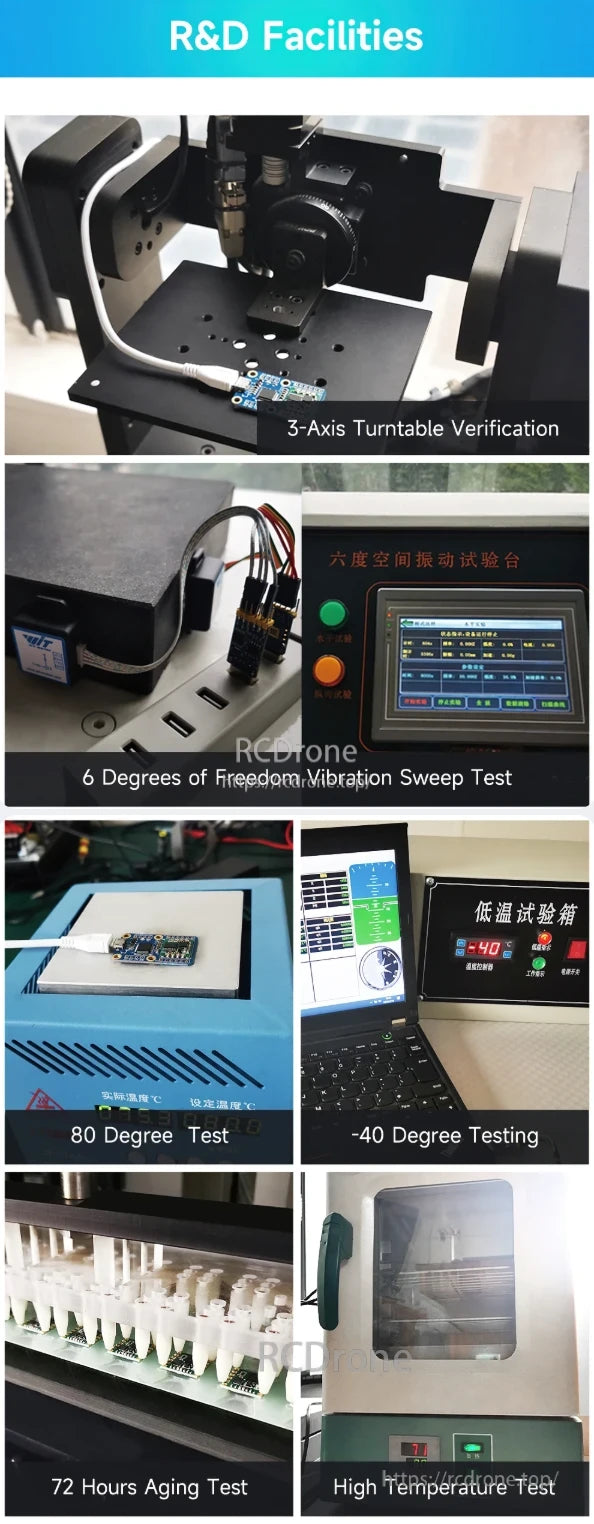
WT901B AHRS IMU 經過嚴格測試:3 軸轉台、6 DOF 振動、極端溫度(80°C 至 -40°C)、72 小時老化和高溫評估。
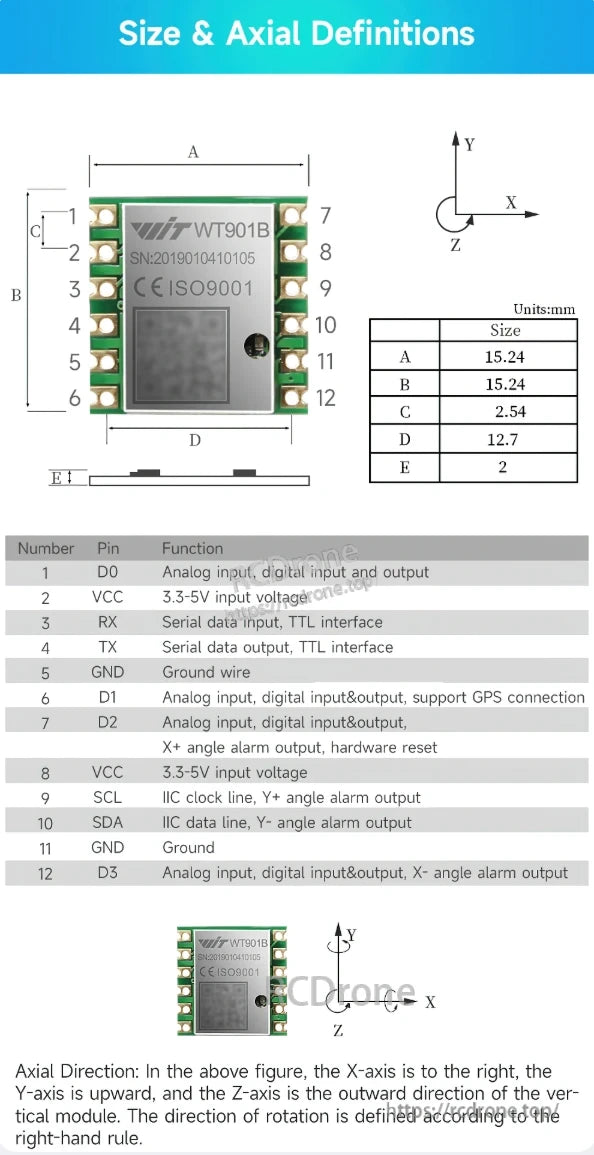
WT901B AHRS IMU 尺寸:15.24×15.24×2.54 mm,12 引腳佈局,具有類比/數字 I/O、UART、I2C 和警報輸出。軸向方向由右手法則定義;X 方向為右,Y 方向為上,Z 方向為外。

WITMotion 的 AHRS IMU WT901B 包含感測模組、目錄、帶有文檔和支援的 QR 碼的促銷卡。