












WitMotion WT901C-485 九軸 IMU 加速度計 陀螺儀 數位羅盤(RS485/RS232/TTL),0.05° 角度精度,0.2–200 Hz AHRS
WitMotion WT901C-485 九軸 IMU 加速度計 陀螺儀 數位羅盤(RS485/RS232/TTL),0.05° 角度精度,0.2–200 Hz AHRS
RCDrone
無法載入取貨服務供應情況
概述
WitMotion WT901C-485 是一款緊湊型的 9 軸 AHRS IMU,基於三軸 MPU9250 類傳感器組合(加速度計 + 陀螺儀 + 磁力計)和 WitMotion 的融合/卡爾曼算法。它提供 角度、加速度、角速度、磁場和四元數輸出,具有 XY 靜態精度 0.05°(動態 0.1°)和 0.2–200 Hz 可調更新速率。多種物理接口(RS485/RS232 Modbus & TTL UART)和寬輸入範圍使 WT901C-485 易於與 Arduino/STM32/MCUs、PC 和工業控制器集成。官方 Windows 軟件(MiniIMU.exe)提供實時圖形、3D 演示、數據記錄/導出和可視化磁場校準。
主要特點
-
9 軸輸出: 角度(滾轉/俯仰/偏航)、3 軸加速度/陀螺儀/磁力計、四元數。
-
高穩定性 &和準確性: XY 0.05° 靜態,0.1° 動態;加速度穩定性 0.01 g.
-
靈活的 I/O: TTL / RS232 / RS485 (Modbus);波特率 4,800–230,400(默認 9,600)。
-
可調速率: 0.2–200 Hz(默認 10 Hz)。
-
寬供電範圍: TTL 3.3–5 V,RS232/RS485 5–36 V;<25 mA 為典型值。
-
工具和 SDK:& Windows 應用程式,Android 應用程式,CH340/CP2102 驅動程式,C/C++/STM32/Arduino/Matlab 的範例代碼。
-
磁校準 &和 3D 演示 用於首次設置;實時圖表和 TXT 匯出。
-
工業設計: –40~85 °C,51×36×15 mm,垂直或水平安裝。
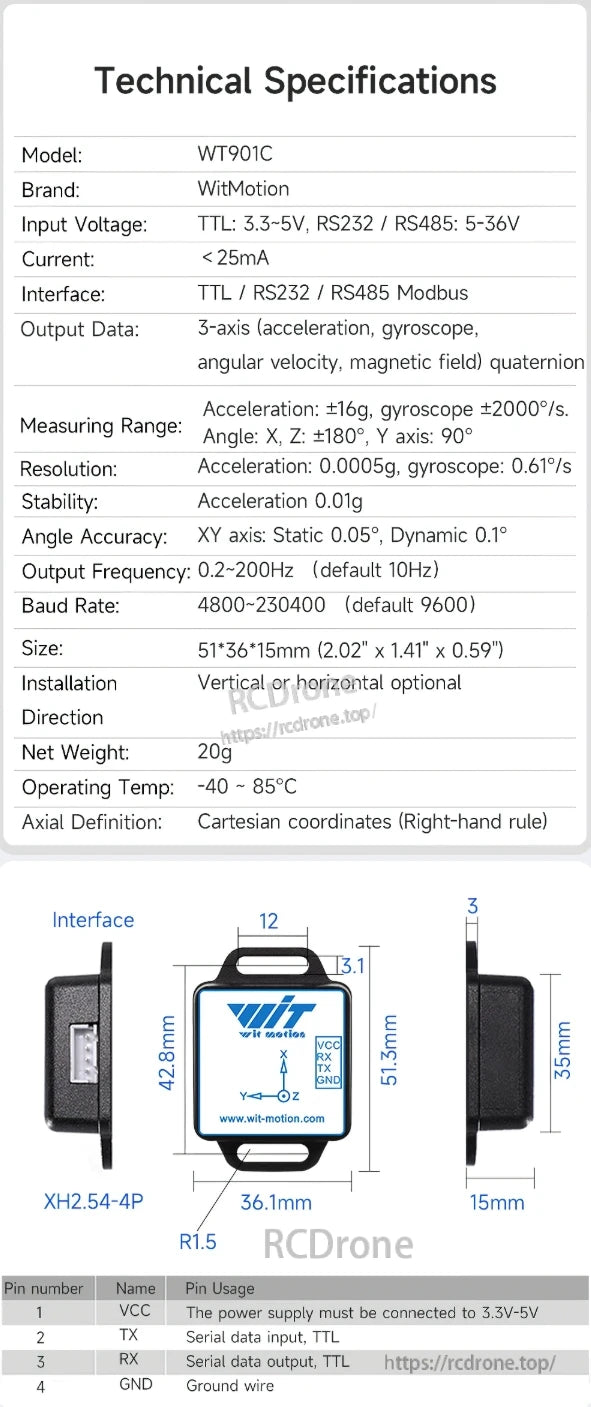
技術規格
| 項目 | 規格 |
|---|---|
| 型號 | WT901C (WT901C-485 變體) |
| 接口 | TTL / RS232 / RS485 (Modbus) |
| 輸入電壓 | TTL: 3.3–5 V; RS232/RS485: 5–36 V |
| 電流 | < 25 mA |
| 輸出數據 | 加速度、角速度、磁場、角度、四元數 |
| 測量範圍 | 加速度 ±16 g、陀螺儀 ±2000 °/s; 角度: X,Z ±180°、Y 90° |
| 解析度 | 加速度 0.0005 g、陀螺儀 0.61 °/s |
| 穩定性 | 加速度 0.01 g |
| 角度精度 | XY 靜態 0.05°、動態 0.1° |
| 輸出頻率 | 0.2–200 Hz(默認 10 Hz) |
| 波特率 | 4,800–230,400(默認 9,600) |
| 尺寸 / 重量 | 51×36×15 mm,20 g |
| 操作溫度 | –40 ~ 85 °C |
| 軸 | 笛卡爾,右手法則 |
| 安裝 | 垂直或水平 |
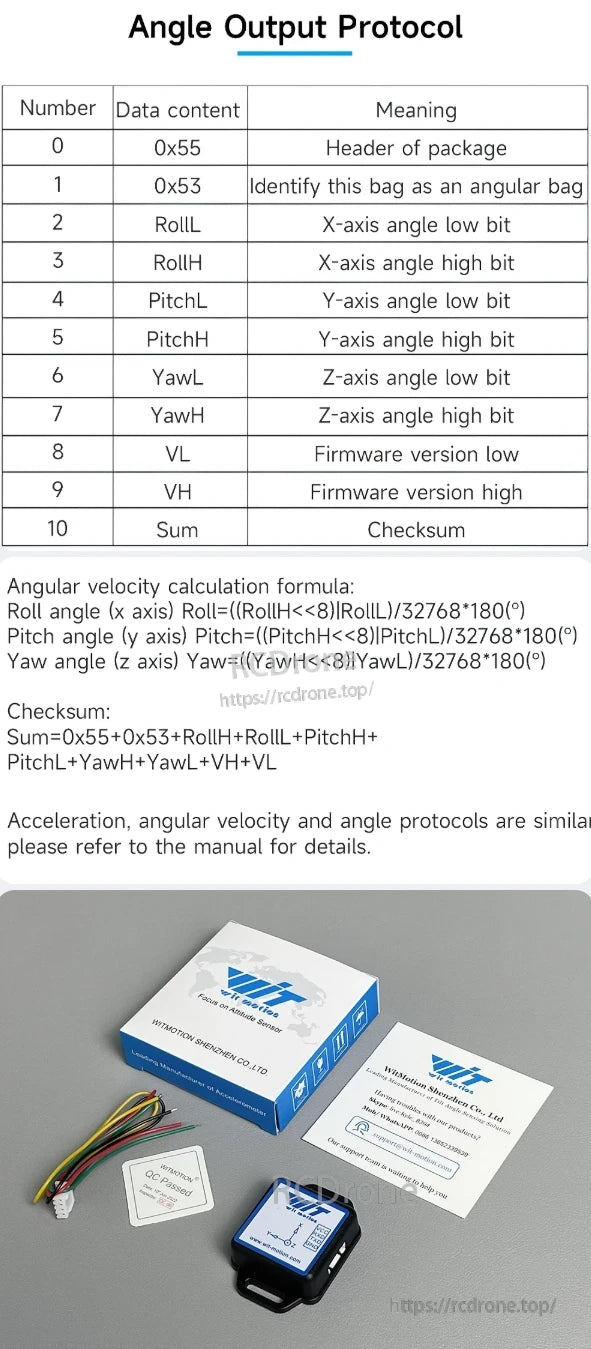
角度幀(0x55 0x53)– 輸出協議
| 字節索引 | 內容 | 意義 |
|---|---|---|
| 0 | 0x55 | 數據包頭 |
| 1 | 0x53 | “角度”幀 ID |
| 2–3 | RollL/RollH | X軸角度(低/高) |
| 4–5 | 俯仰L/俯仰H | Y軸角度(低/高) |
| 6–7 | 偏航L/偏航H | Z軸角度(低/高) |
| 8 | VL | 固件版本低 |
| 9 | VH | 固件版本高 |
| 10 | 總和 | 校驗和 |
角度解碼
滾轉(°)= ((滾轉H << 8) | 滾轉L) / 32768 × 180
俯仰(°)= ((俯仰H << 8) | 俯仰L) / 32768 × 180
偏航(°)= ((偏航H << 8) | 偏航L) / 32768 × 180
檢查碼
總和 = 0x55 + 0x53 + RollL + RollH + PitchL + PitchH + YawL + YawH + VL + VH.
(加速度和角速度框架遵循相同的佈局樣式—請參閱手冊。)
尺寸 &和連接器
外殼尺寸: 51 × 36 × 15 毫米 (高 × 寬 × 深),帶安裝耳;重量約 ≈ 20 克。
連接器: XH2.54-4P (傳感器上的板頭)。
引腳圖 (TTL 版本)
| 引腳 | 名稱 | 描述 |
|---|---|---|
| 1 | VCC | 電源輸入 3.3–5 V |
| 2 | TX | 串行數據輸入,TTL電平 |
| 3 | RX | 串行數據輸出,TTL電平 |
| 4 | GND | 接地 |
注意:直接與MCU集成時使用TTL電平。RS232/RS485變體使用各自的電壓水平和接線標準。
軟件&和工具
-
MiniIMU.exe(Windows):配置(算法、安裝方向、範圍、帶寬)、實時圖表、原始/十六進制視圖、數據錄製和TXT導出。
-
3D演示:實時可視化方向(源代碼可用)。
-
視覺磁性校準: 橢圓擬合向導以消除偏差(建議首次使用時使用)。
-
驅動程式 &和代碼: CH340/CP2102 驅動程式;STM32、Arduino、C/C++、Matlab 的範例;Android 應用程式;PC/手機演示視頻。
典型應用
自動化和機器人技術、水平平台、傾斜角度監測、振動監測、消費電子產品、物聯網系統集成、工業測試、虛擬現實/增強現實頭盔。
詳細資訊

具成本效益的 AHRS IMU,X Y 軸精度為 0.05°。具備傾斜、振動、姿態感測功能,使用 WitMotion 融合算法。包括加速度、陀螺儀、角度、磁場、卡爾曼濾波和四元數功能。
WitMotion WT901C IMU 感測器提供三軸加速度、陀螺儀、角速度和磁場感測。它支持 TTL/RS232/RS485 接口,具有 ±16g 的加速度範圍、±2000°/s 的陀螺儀、0.05° 的靜態角度精度,並在 -40°C 到 85°C 的範圍內運行。

WitMotion WT901C IMU 感測器提供自動化、虛擬實境頭盔、水平測量和振動監測。應用包括消費電子產品、物聯網整合、工業測試以及擴增實境/虛擬實境。免費軟體提供用戶友好的姿態測量,並提供實時角度數據。
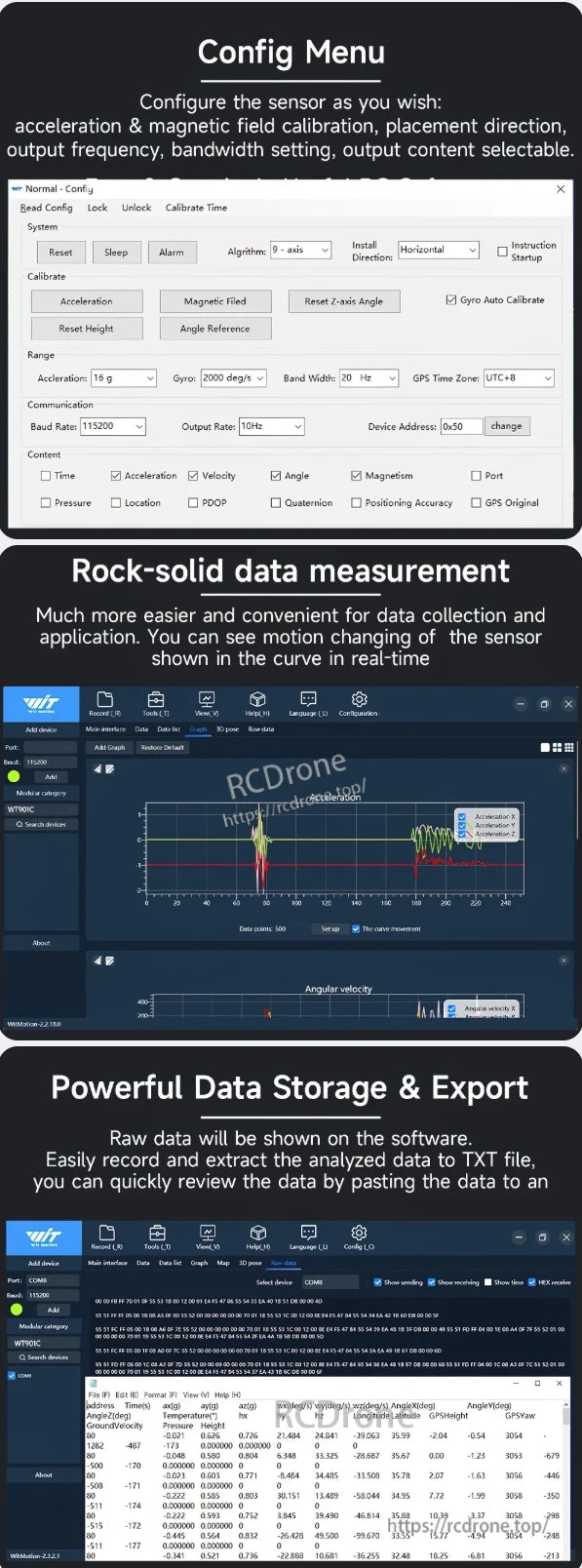
WitMotion WT901C IMU 感測器提供可配置的加速度、磁場和方向設置。它提供實時數據可視化、穩健的測量,並支持以 TXT 格式進行數據存儲/導出以便分析。
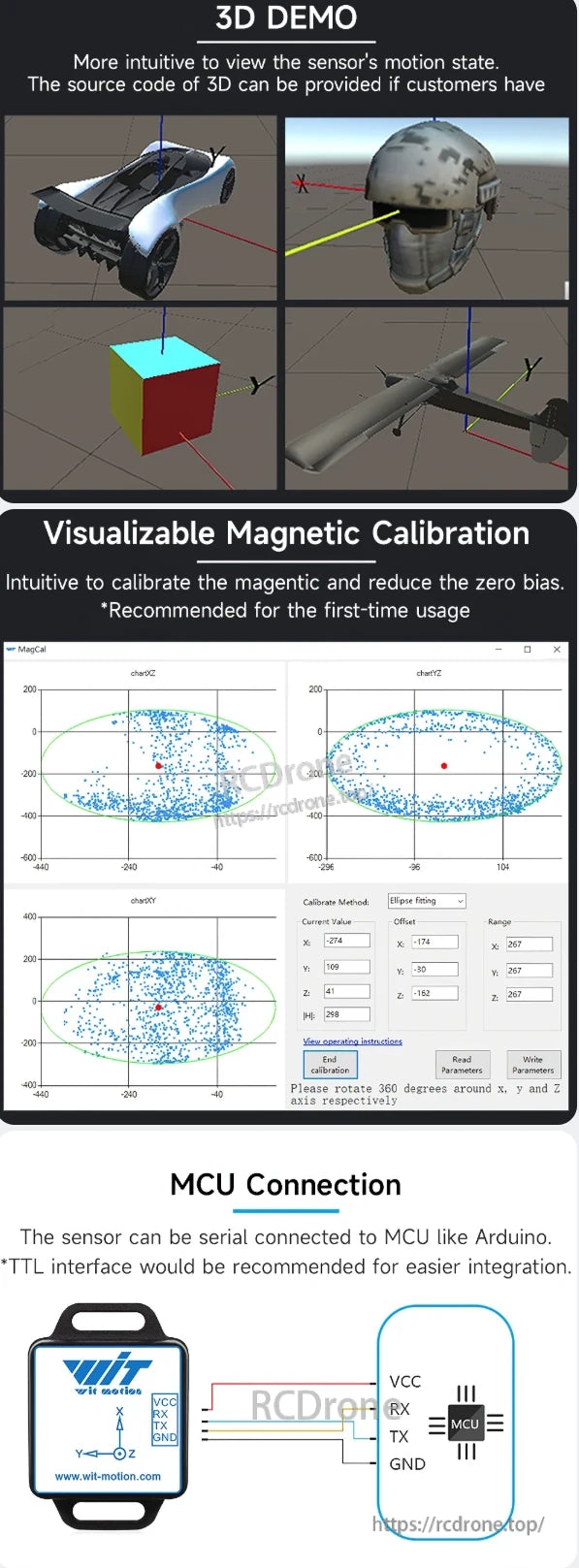
3D 演示可視化傳感器運動,包含汽車、頭盔、立方體和無人機模型。磁性校準介面允許直觀調整。MCU 連接細節具有 TTL 介面,適用於 Arduino,並標示 VCC、RX、TX、GND 引腳。

開發套件包括免費的 Windows 軟體、驅動程式、手冊和 STM32、Arduino、C++、MATLAB 的範例代碼。提供 PDF、演示視頻和 WT901C IMU 傳感器的 Android 應用支援。
IMU 傳感器 WT901C 角度輸出協議細節:數據結構、角度計算、校驗和公式、包裝。包含滾轉、俯仰、偏航角度、固件版本和校驗和。
Related Collections












