






WitMotion WTGAHRS1/2 十軸 GPS-IMU 加速度計 陀螺儀 磁力計 氣壓計 AHRS,0.2–200 Hz,UART/I²C,BDS+GPS 導航
WitMotion WTGAHRS1/2 十軸 GPS-IMU 加速度計 陀螺儀 磁力計 氣壓計 AHRS,0.2–200 Hz,UART/I²C,BDS+GPS 導航
WitMotion
無法載入取貨服務供應情況
概述
WTGAHRS1/2 是 GNSS 輔助的 AHRS/IMU 模組,融合了 3 軸加速度計、3 軸陀螺儀、3 軸磁力計、3 軸歐拉角和氣壓計,並具備 BDS/GPS 定位功能。它們使用卡爾曼濾波器在 0.2–200 Hz 的頻率下提供穩定的姿態、航向、經度/緯度、高度和地面速度。核心精度為 X/Y 0.2° 和 Z 1°(經過校準,遠離磁干擾)。它們提供 UART-TTL 和 I²C(400 kHz)輸出,免費的 Windows 上位機軟體,以及豐富的 STM32/Arduino/Windows/Matlab 範例—非常適合無人機、無人地面車、機器人和車輛導航。
型號選擇
| 型號 | 天線 | 供應 | 電流 | 輸出速率 | 角度精度 |
|---|---|---|---|---|---|
| WTGAHRS1 | 外部 GNSS (BDS+GPS) | 3.3–5 V | < 50 mA | 0.2–200 Hz | X/Y 0.2°; Z 1° |
| WTGAHRS2 | 內部 GNSS (BDS+GPS) | 3.3–5 V | < 40 mA | 0.2–200 Hz | X/Y 0.2°; Z 1° |
IMU &和機械規格 (WTGAHRS1/2)
-
尺寸: 72.5 mm × 38 mm × 27 mm
-
傳感器: 3軸加速度計; 3軸陀螺儀; 3軸磁力計; 3軸角度; 氣壓計
-
範圍: 加速度 ±16 g; 陀螺儀 ±2000 °/s; 角度 ±180°
-
氣壓計精度: 1 Pa
-
典型測量誤差: 1°
-
接口: UART-TTL (波特率 4,800–921,600), I²C (支持 400 kHz)
-
輸出內容: 時間, 加速度, 角速度, 歐拉角, 磁場, 壓力, 高度, 經度, 緯度, 地面速度
-
重量: WTGAHRS1 70.6 g; WTGAHRS2 62.4 g
GNSS 規格
-
系統/頻段:BDS/GPS/GLONASS/GALILEO/QZSS/SBAS;C/A 代碼 1.023 MHz
-
射頻:三個接收通道;S11/S22 SWR ≤ 1.3;50 Ω ± 5%
-
水平精度:< 2.5 m(自主),< 2 m(SBAS)[CEP50%,24 小時靜態,−130 dBm,~6 個可用衛星]
-
速度精度:< 0.1 m/s;航向精度:< 0.5°;時間:30 ns;參考:WGS-84
-
動態:高度 50,000 m;速度 50,000 m/s;加速度 ≤ 4 g
-
靈敏度:跟蹤 −162 dBm;獲取 −148 dBm
-
啟動時間:冷啟動 35 秒;暖啟動 32 秒;熱啟動 1 秒
-
1PPS:0。25 Hz–1 kHz;位置更新:1–10 Hz(默認為 1 Hz)
-
介面:UART/TTL
軟體與開發
-
Windows 上位機軟體:數據記錄、3D 模型、曲線繪製、儀表板、模組配置
-
範例代碼/資源:STM32 UART 示範、Arduino 函式庫、8051 示範、Windows C/C# 和 Matlab 範例、Android APP
-
快速測試接線(USB-TTL):GND–GND,VCC–5 V,TX–RX,RX–TX
典型應用
無人機/無人地面車 AHRS、機器人和自動導引車/自主移動機器人導航、車輛定位及速度/姿態測量、天線/太陽能追蹤器、平台穩定、教育及演算法研究。
包含內容
-
WTGAHRS1 或 WTGAHRS2 感測器(根據選擇)
-
GNSS 天線(WTGAHRS1 外部天線版本)
-
使用者指南及 PC 軟體和範例的下載連結
買家注意事項
-
Z 軸/航向精度取決於校準和磁場環境。
-
當您需要外部 GNSS 天線時,選擇 WTGAHRS1;若需內部天線的緊湊型設計,請選擇 WTGAHRS2。
詳細資訊

WitMotion WTGAHRS1 AHRS+GPS 模組包含 3 軸加速度計、陀螺儀、磁力計、氣壓計和 GPS。提供高精度的姿態、航向和位置數據,適用於機器人技術和導航。

WitMotion WTGAHRS1,10 軸 AHRS 模組,搭載 ICM-42605 和 AK8963 晶片。特徵包括3軸加速度計、陀螺儀、磁力計、GPS和TTL接口。支持3.3-5V,<50mA電流,4800-921600波特率,以及±250-2000度/秒的陀螺範圍。
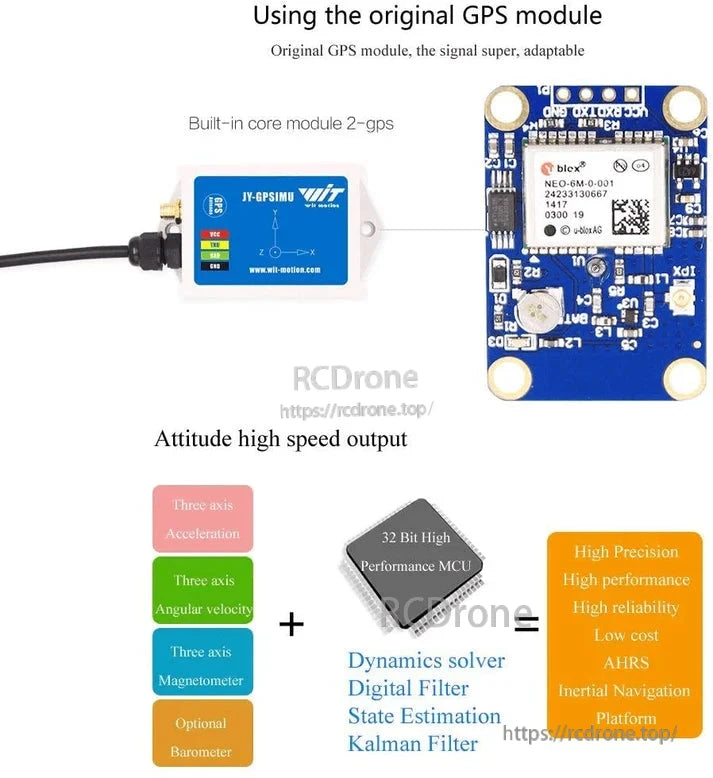
WitMotion WTGAHRS10-Axis AHRS包括GPS、高速姿態輸出、32位MCU和集成傳感器。結合加速度、角速度、磁力計、可選的氣壓計,並配備數字和卡爾曼濾波器,以實現可靠、低成本的慣性導航。


WitMotion JY-GPSIMU 10-Axis AHRS,帶有標記的接線顏色







