Yahboom 4通道編碼器馬達驅動模組(STM32F103RCT6,AT8236x4)適用於機器人車,5-12V
Yahboom 4通道編碼器馬達驅動模組(STM32F103RCT6,AT8236x4)適用於機器人車,5-12V
Yahboom
無法載入取貨服務供應情況
概述
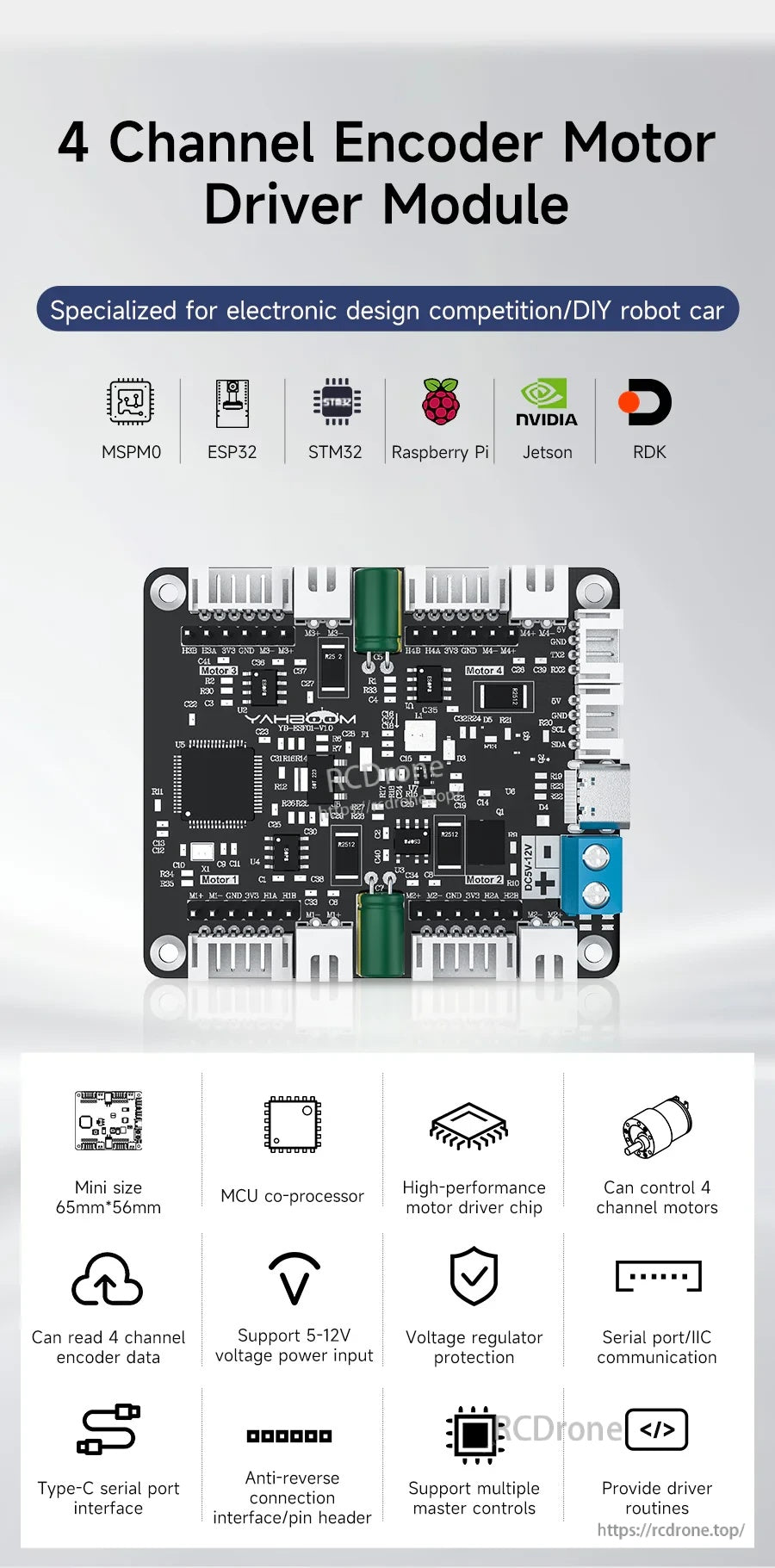
Yahboom 4通道編碼器馬達驅動模組是一款專為DIY機器人車和機器人項目設計的馬達驅動模組(馬達驅動擴展板)。它支持同時控制4通道直流馬達,並包括一個板載編碼器接口,用於讀取4通道編碼器數據,以實現實時速度反饋和精確運動控制。內建的STM32F103RCT6協處理器負責馬達驅動和編碼器數據採集,並通過IIC或串行通信與外部主控制器通信。
主要特點
- 4通道獨立馬達驅動: 同時控制4個馬達。
- 板載編碼器接口: 讀取4通道編碼器數據以進行速度反饋。
- 內建協處理器: STM32F103RCT6用於馬達控制和編碼器數據採集;減少主控制器的引腳使用。
- 馬達驅動芯片: AT8236 ×4;包括短路保護、過流保護和過熱保護。
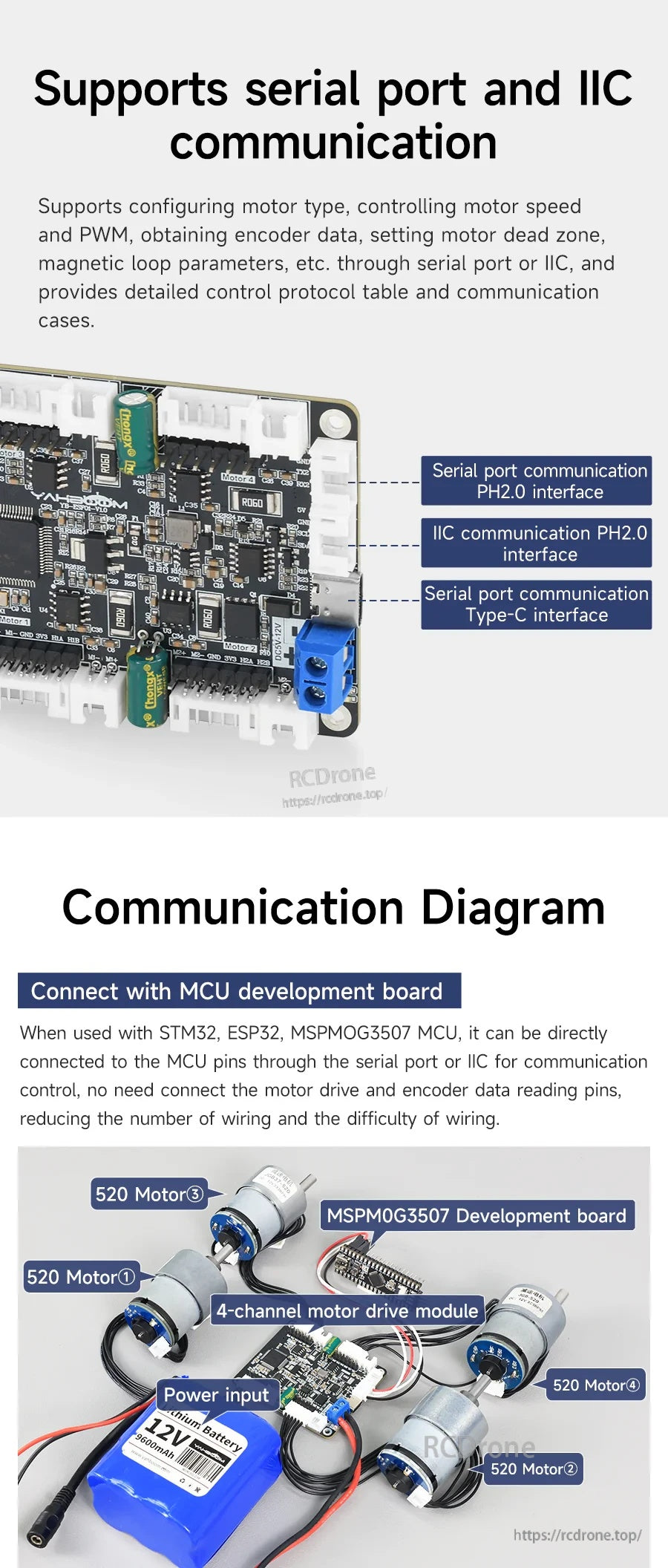
- 通信: 支持串口和IIC通信;支持配置馬達類型、控制馬達速度和PWM、獲取編碼器數據、設置馬達死區和磁環參數。
- Type-C接口: 支持通過Type-C進行串行通信;可以連接到嵌入式主控器的USB端口或直接連接到計算機進行串行軟件的調試/測試。
- 電源和保護: 支持5–12V電壓電源輸入;板載電源反接保護電路;電壓調節保護。
- 電壓測量: 內置電壓檢測電路;ADC可以讀取電源電壓(電池電壓)。
- 連接器設計:防反接介面/針頭;清晰的介面佈局和標記,便於接線。
- 提供驅動程序例程(如產品材料中所述)。
規格
| 產品 | 4通道編碼器馬達驅動模組 |
| 板尺寸 | 65mm * 56mm |
| 驅動馬達數量 | 4 |
| 板載協處理器 | STM32 (STM32F103RCT6) |
| 馬達驅動芯片 | AT8236 * 4 |
| 馬達編碼器 | 板載編碼器接口 |
| 電源輸入 | 5–12V |
| 通訊 | IIC或串行通訊 |
| 佔用MCU引腳 | 4 |
| 針座馬達接口 | 4 |
| XH2.54-2pin 馬達介面 | 4 |
| PH2.0-6pin 編碼器馬達介面 | 4 |
| 控制方法 | 通過串行或 IIC 通訊控制馬達並獲取編碼器數據 |
| 驅動難度 | 簡單 |
介面 & 佈線說明
- 通訊介面: 串口通訊 (PH2.0 介面), IIC 通訊 (PH2.0 介面), 串口通訊 (Type-C 介面)。
- 支持的連接方式: PH2.0 線, XH2.54 線, 杜邦線 (如產品材料中所述)。
- 佈線簡化: 只需四根連接線即可實現與主控單元的高效通訊 (如產品材料中所述)。
馬達相容性&電源供應注意事項
- 支持市場上大多數5–12V直流減速馬達和編碼器速度馬達(如產品材料中所述)。
- 列出的相容馬達範例:TT直流減速馬達;帶速度編碼器的TT馬達;520馬達;310馬達;以及市場上大多數其他直流減速馬達和編碼器速度馬達。
電源供應提醒:根據馬達的額定電壓選擇合適的電源(電池),以避免損壞馬達或驅動板。提供的注意事項建議:520馬達使用12.6V電源,310馬達或TT馬達使用7.4V電源。模組的標稱電源輸入範圍為5–12V,因此在使用前確認實際輸入電壓在模組的額定範圍內。
教程
教程連結:http://www.yahboom.net/study/Quad-MD-Module
視頻
如需接線和整合支持,請聯繫[email protected] or訪問https://rcdrone.top/.
詳情
使用專用的STM32協處理器驅動多達四個帶編碼器反饋的直流電機,以實現更平滑的閉環機器人車控制。

清晰的標籤和防反接連接器佈局使電機、編碼器、電源和控制端口的接線變得簡單明瞭。
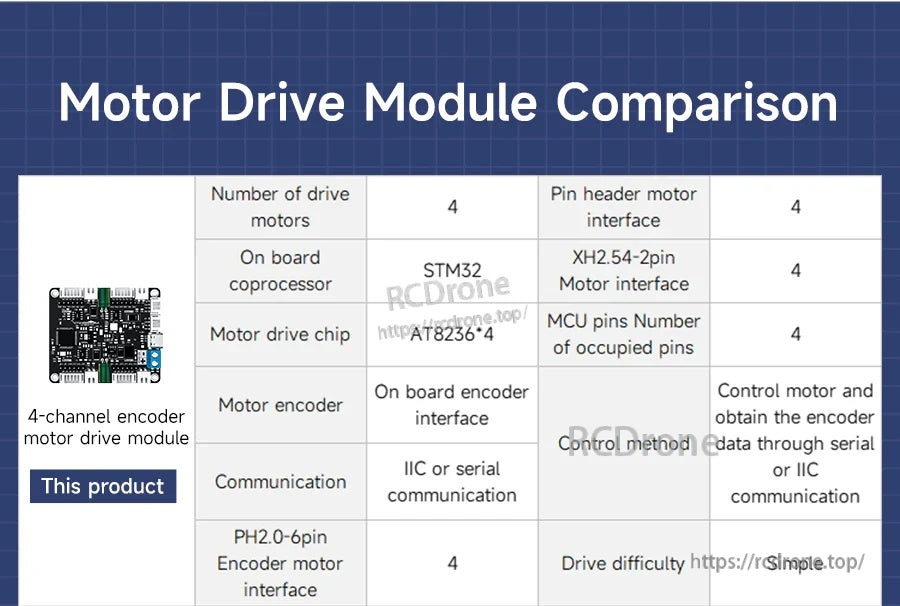
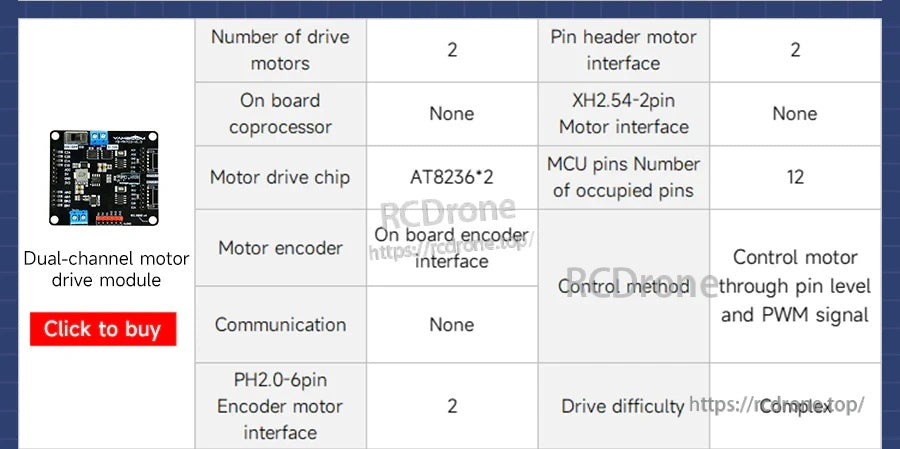
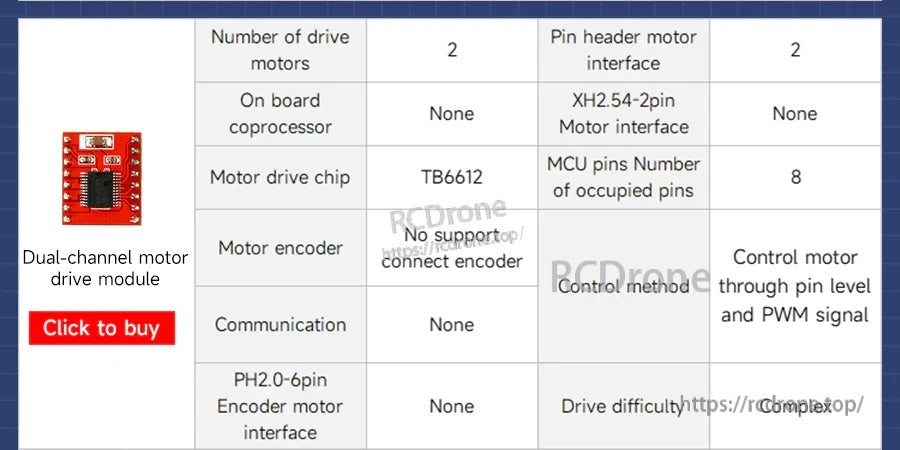
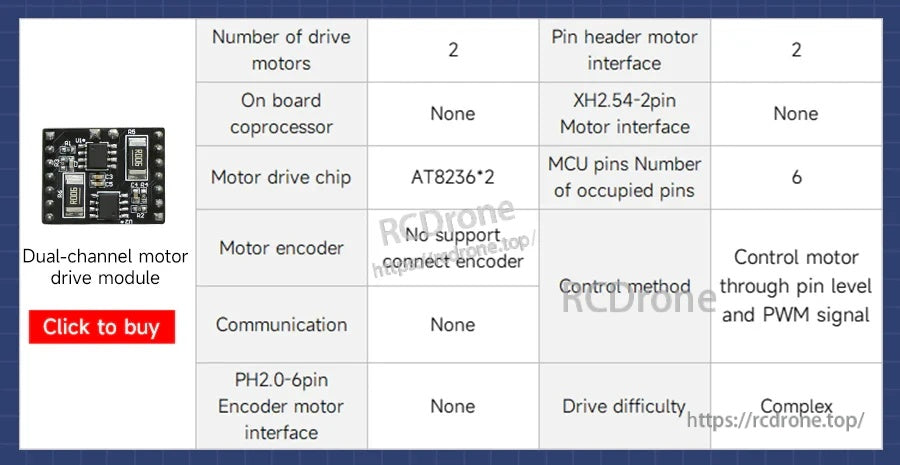
快速規格比較解釋了為什麼四通道板在減少MCU引腳使用的同時增加了編碼器回讀功能。
該模塊可與流行的TT電機和常見的金屬齒輪電機配合使用,包括配備速度編碼器的版本。



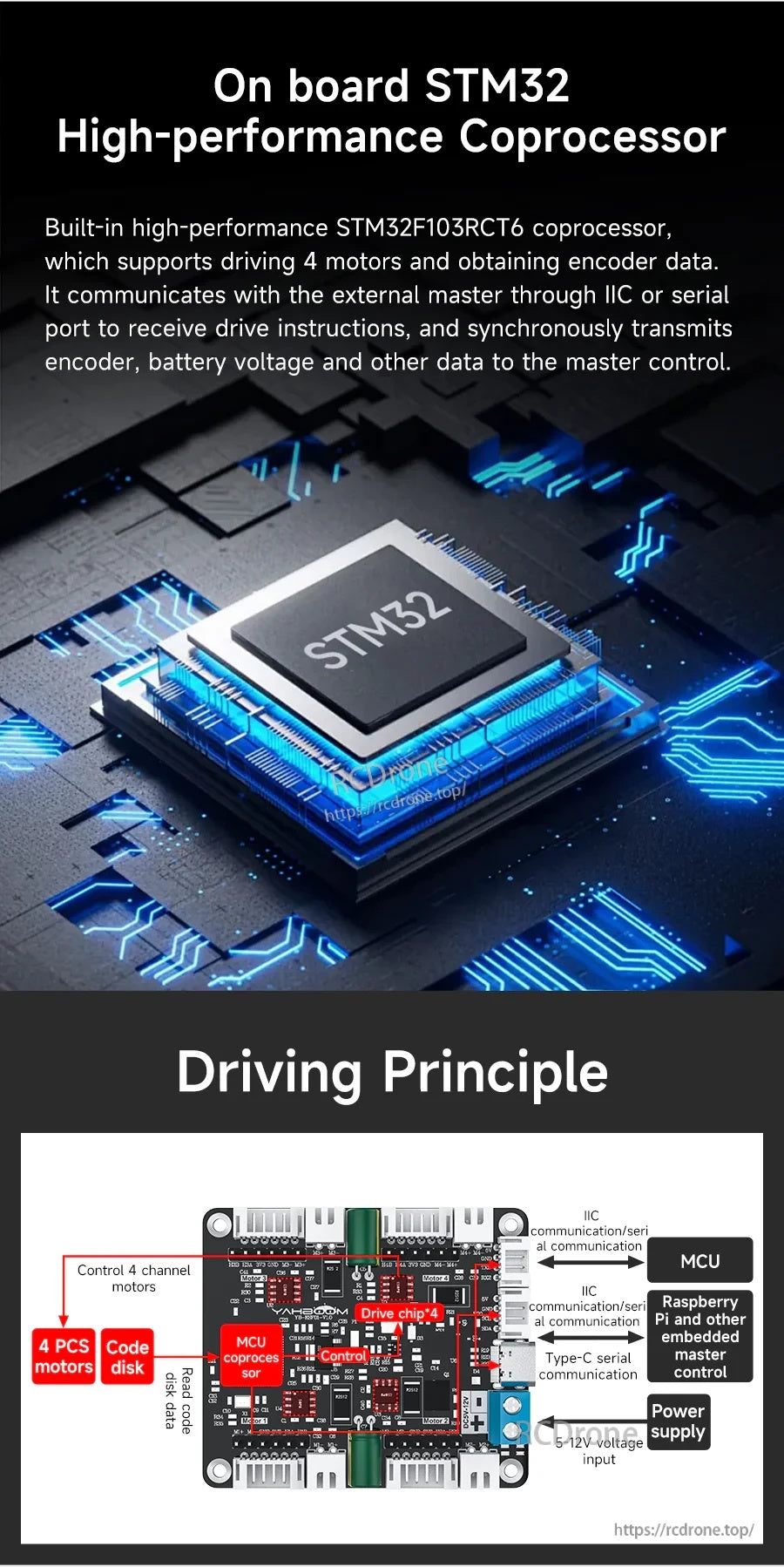
板載STM32F103RCT6負責電機驅動和編碼器取樣,然後將速度和狀態數據發送給主控制器。
選擇IIC或UART控制,並使用Type‑C串行連接進行快速調試和參數調整。
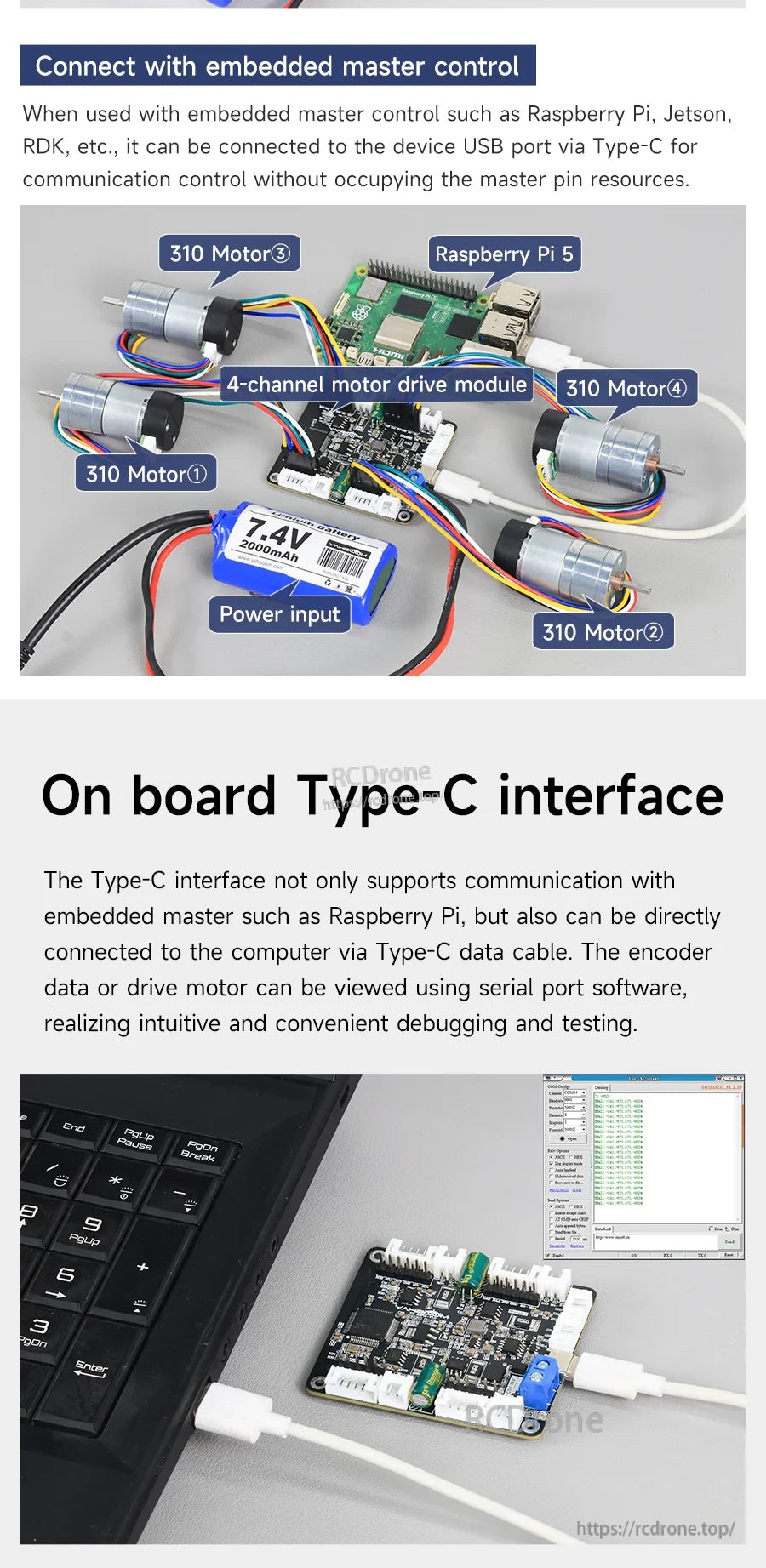
Type‑C支持直接PC串行測試或單線連接至嵌入式控制器USB端口。
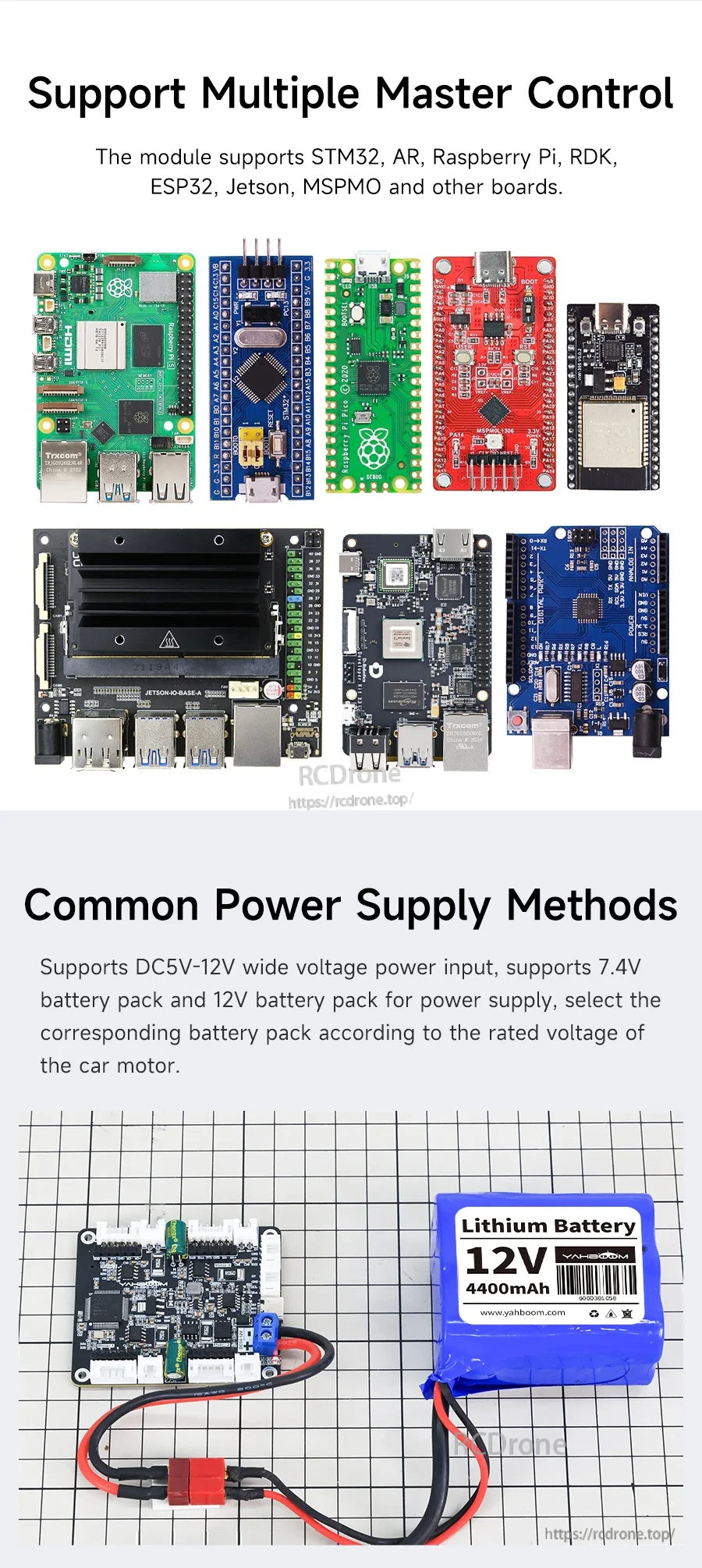
從5–12V電源如電池組為板供電,然後將電機電壓匹配到選定的電源。
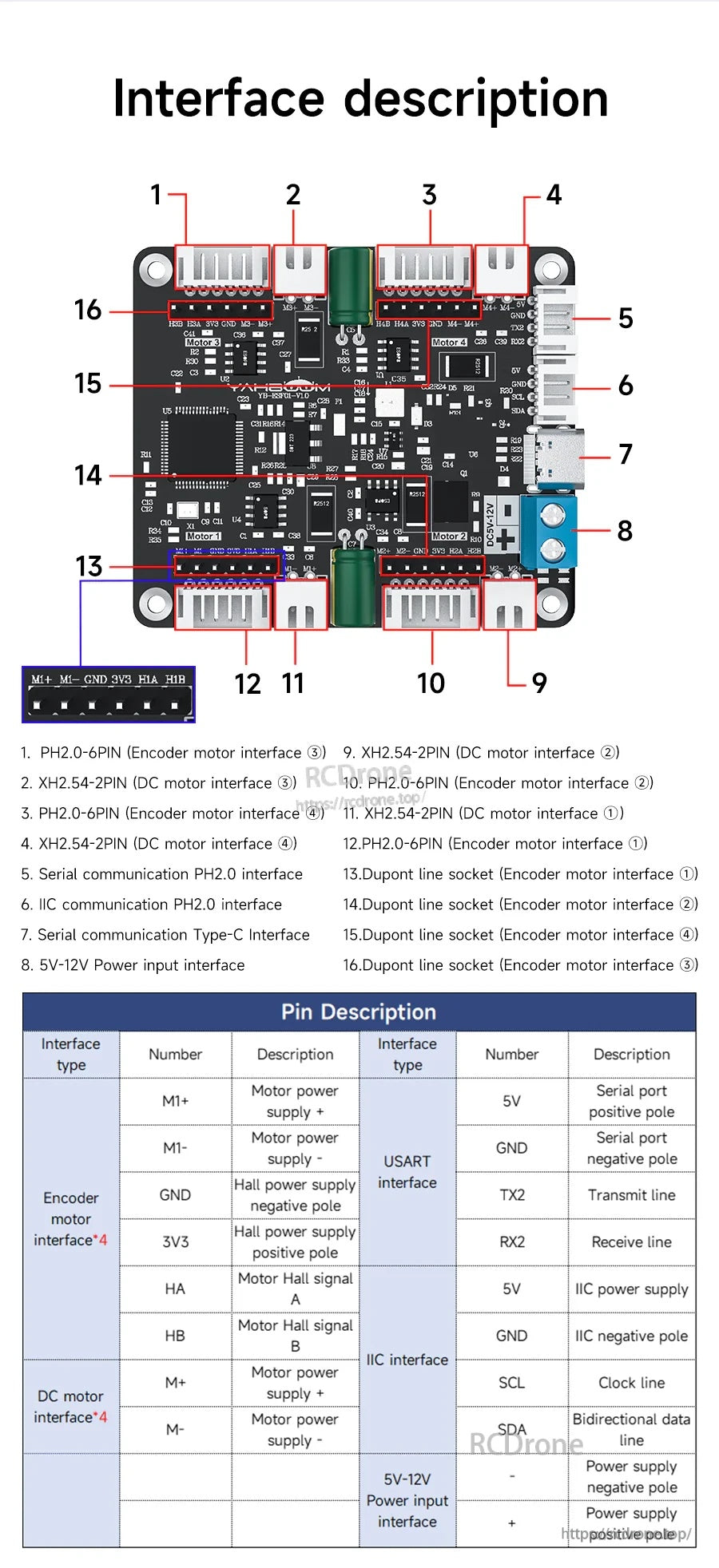
引腳圖可幫助一目了然地識別電機輸出、PH2.0編碼器接口、控制頭和電源輸入。

多種連接器選項支持不同的電機類型,並提供常見2S和3S電池設置的電壓建議。

可選的PH2.0電纜可用於將Yahboom電機驅動模塊連接到兼容的線束。
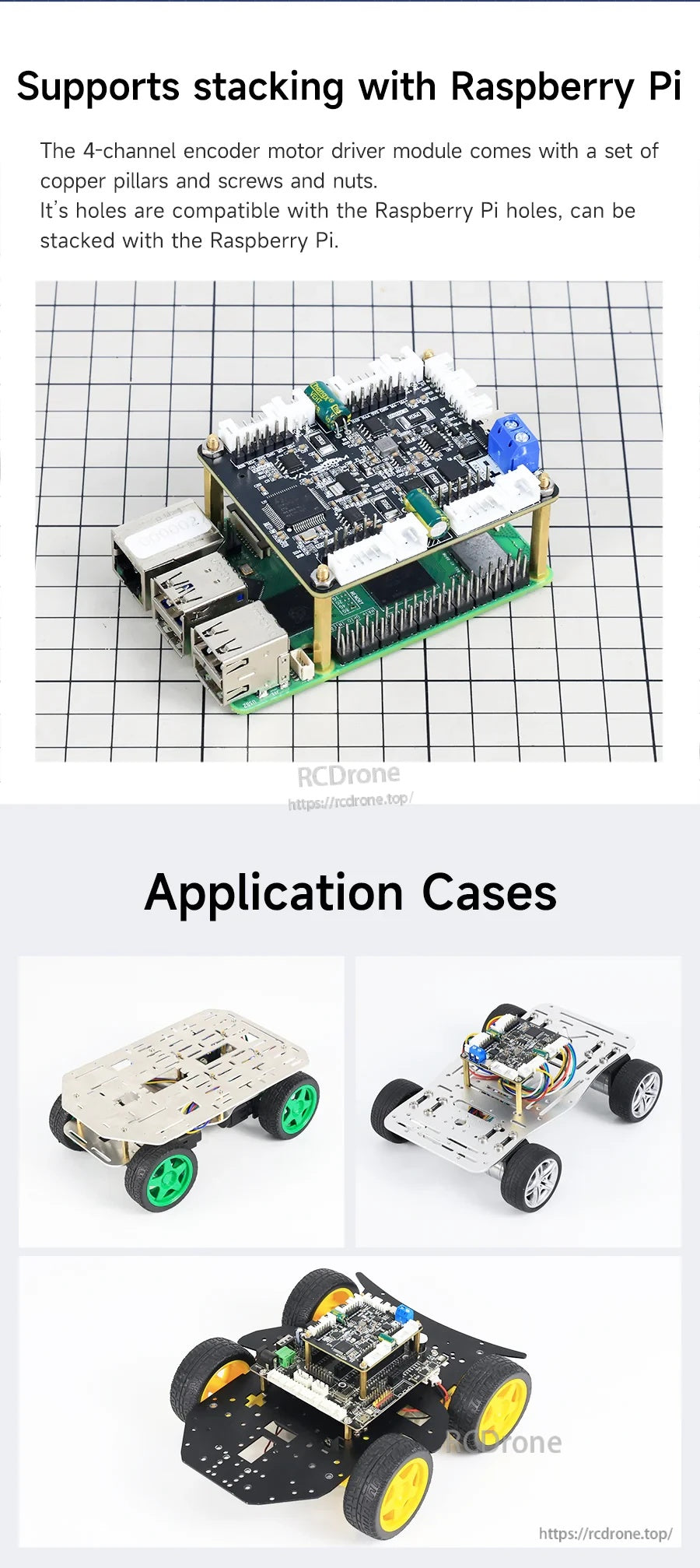
四通道編碼器電機驅動模塊支持使用銅柱和螺絲與Raspberry Pi安裝孔堆疊,以構建整潔的機器人車。
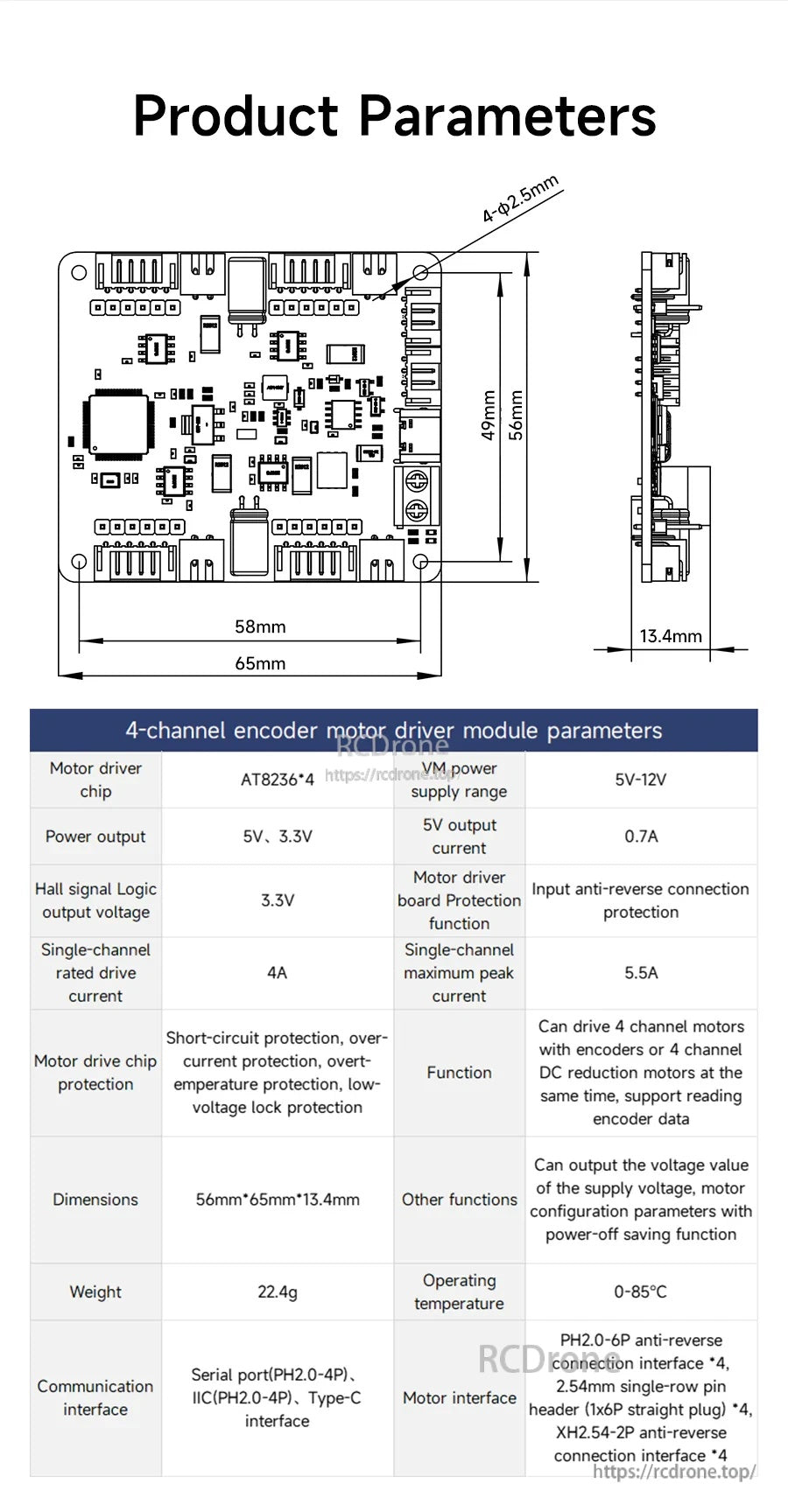
Yahboom 4通道編碼器馬達驅動模組列出了關鍵規格,如5–12V馬達電源、3.3V邏輯和65×56×13.4mm的板尺寸,方便您規劃機器人車輛的建造。
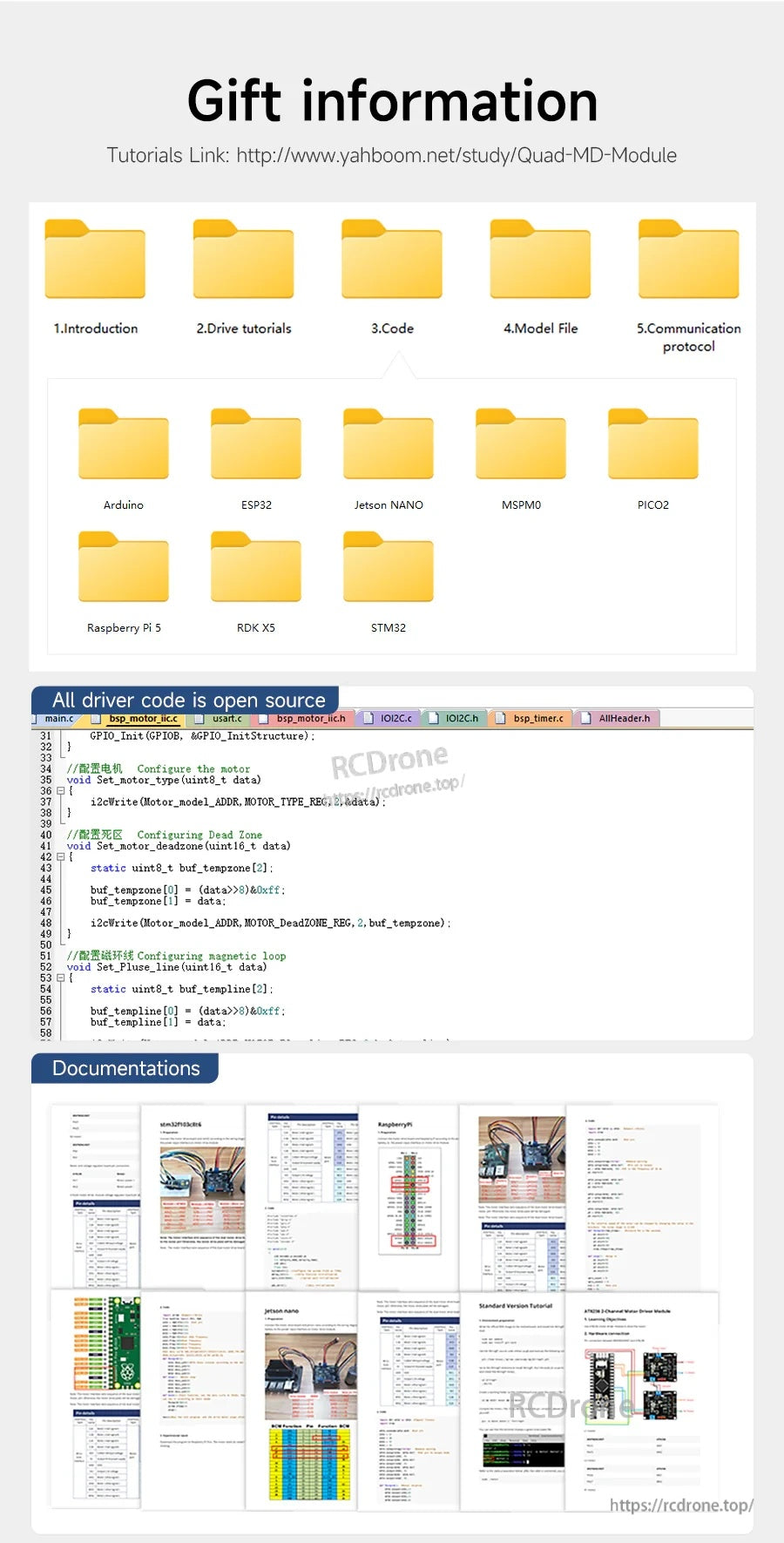
Yahboom提供教程文件夾、開源驅動代碼和文檔,以幫助設置和編程。
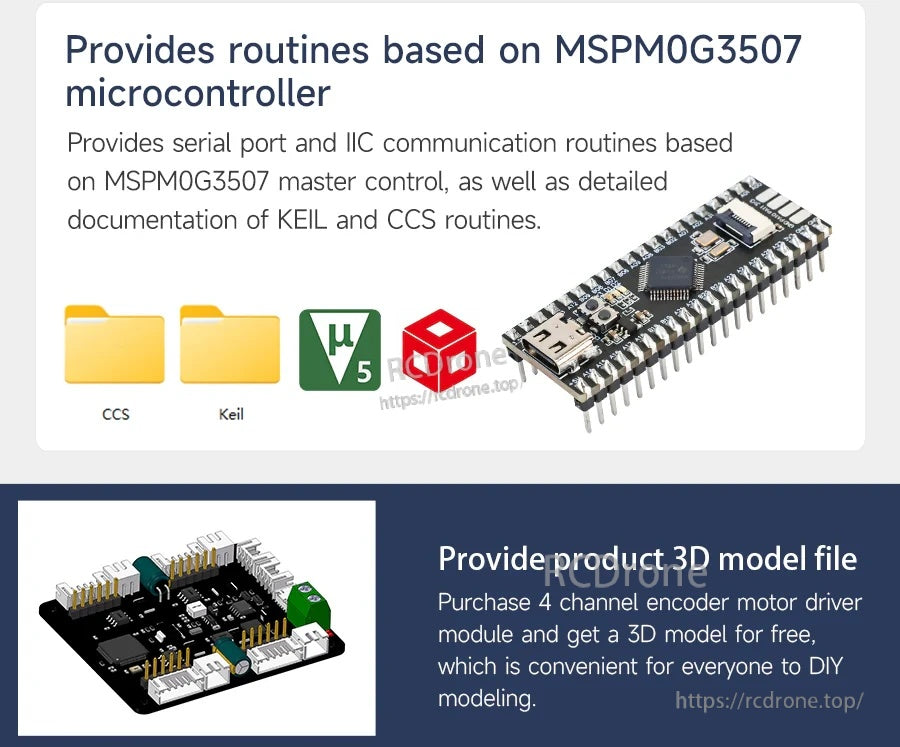
該模組包括基於MSPM0G3507的串行和IIC通信例程,附有KEIL/CCS文檔,還提供可下載的3D模型文件以供DIY建模。
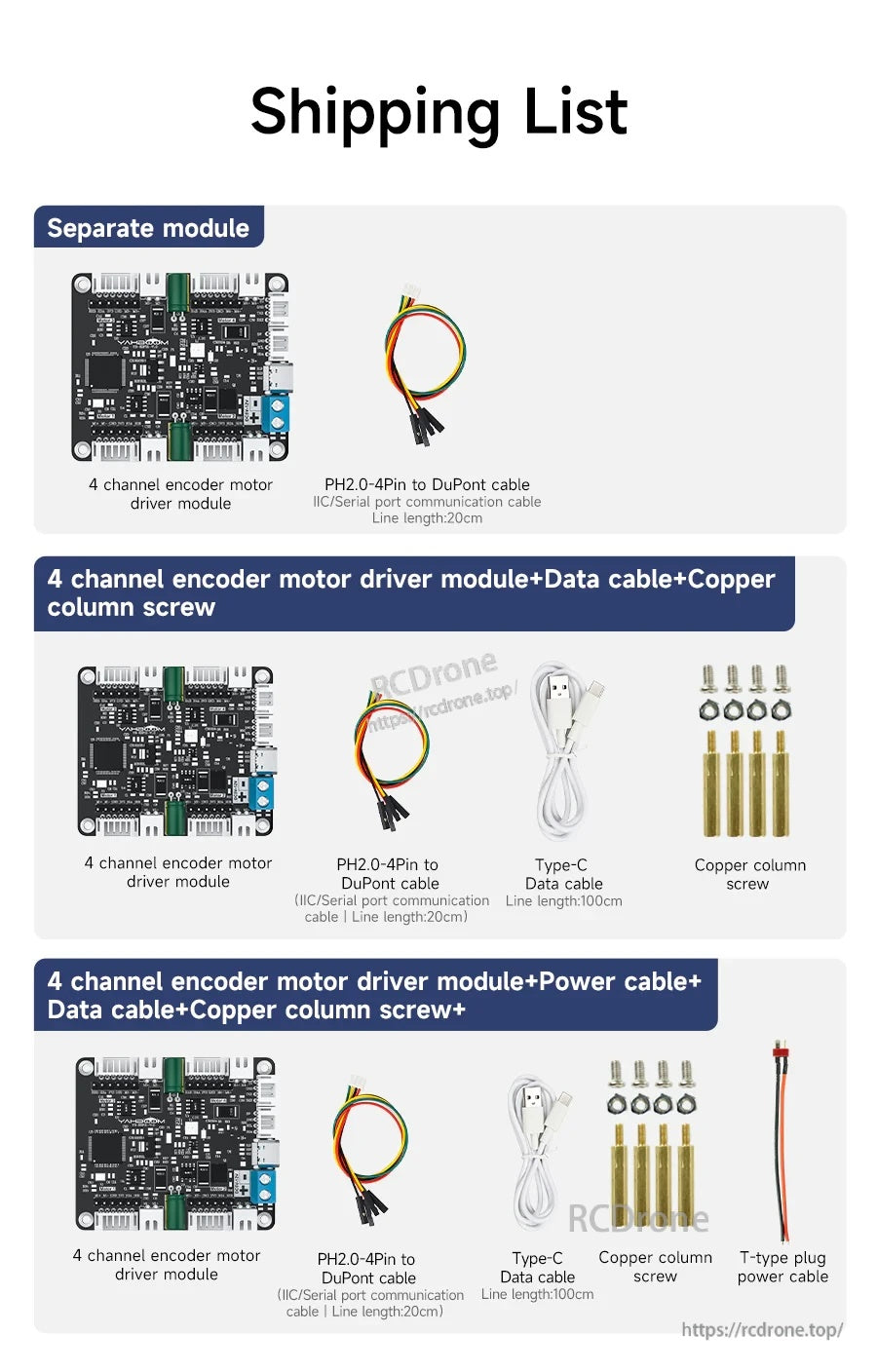
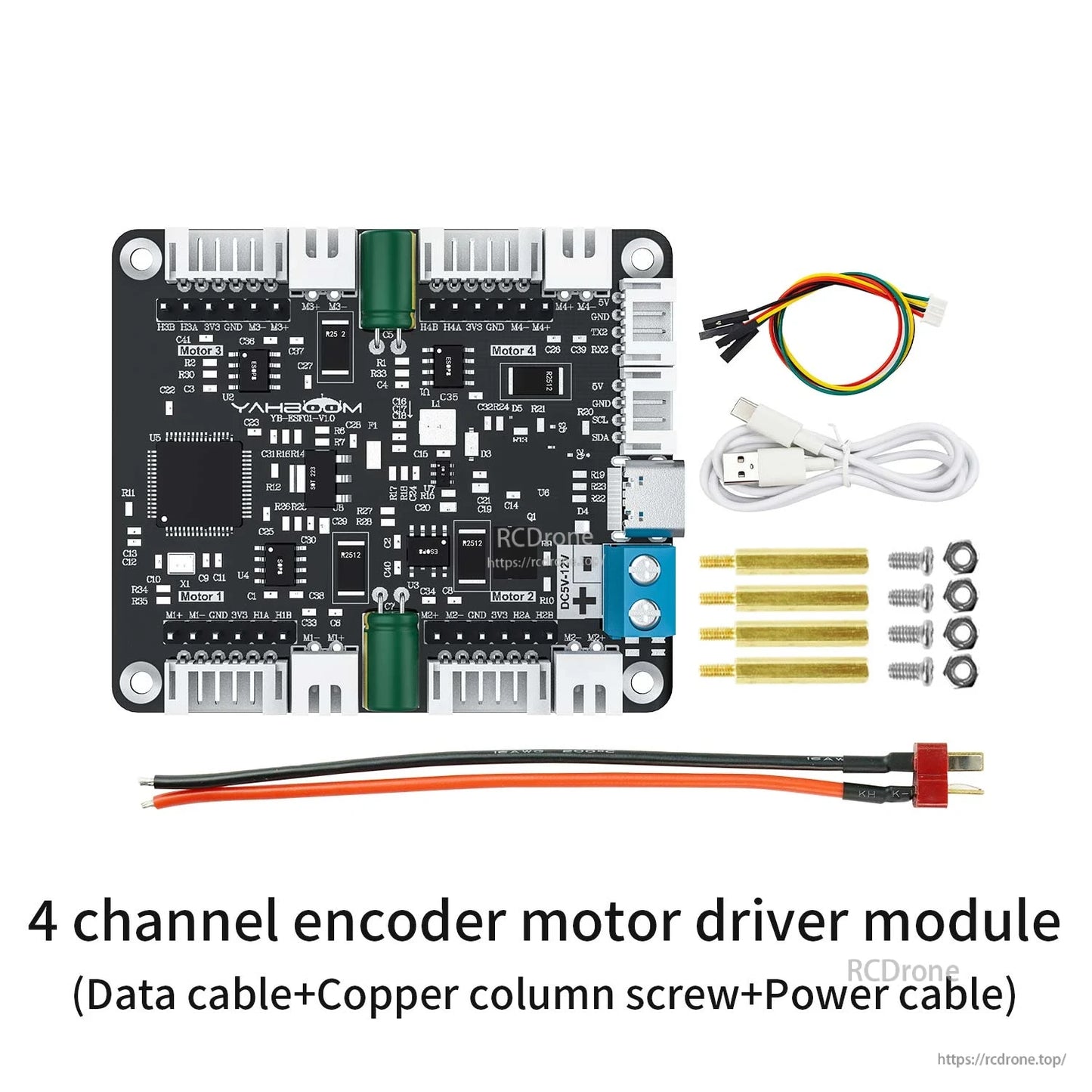
包裝選項包括4通道編碼器馬達驅動模組,配有PH2.0-4Pin轉杜邦線、USB‑C數據線和帶螺絲的安裝支架,並可選擇T‑插頭電源線。

Yahboom 4通道編碼器馬達驅動模組使用緊湊的PCB,配有標記的JST連接器和螺絲端子,以實現更整潔的馬達和電源布線。