








Yahboom AI VIEW 雙目結構光 3D 深度相機,適用於 ROS1/ROS2 機器人,USB3.0 Type‑C RGBD
Yahboom AI VIEW 雙目結構光 3D 深度相機,適用於 ROS1/ROS2 機器人,USB3.0 Type‑C RGBD
Yahboom
無法載入取貨服務供應情況
概述
Yahboom AI VIEW 是一款用於 ROS 機器人開發的雙目結構光 3D 深度相機。它結合了雙目視覺和結構光投影,通過左右影像匹配和三角測量來計算深度,支持在複雜環境中的 3D 重建和深度感測。其緊湊的機身尺寸為 68.3 × 25.3 × 19.0 mm,測量範圍為 0.25–2.5 m,並具備抗強光的能力,適合室內使用場景。
主要特點
- 雙目結構光深度感測;測距原理:主動雙目立體視覺
- ROS 支持:ROS1 & ROS2;兼容 ROS1/ROS2 系統並提供 SDK 支持
- 內建深度引擎晶片:MX6000
- 更小的盲區:低至 0.25 m(近距離測量;適用於機器人末端執行器定位)
- 抗眩光能力(強光抗性);使用說明:“請在室內使用”
- 跨平台操作系統列表:Android / Linux / Windows8/10
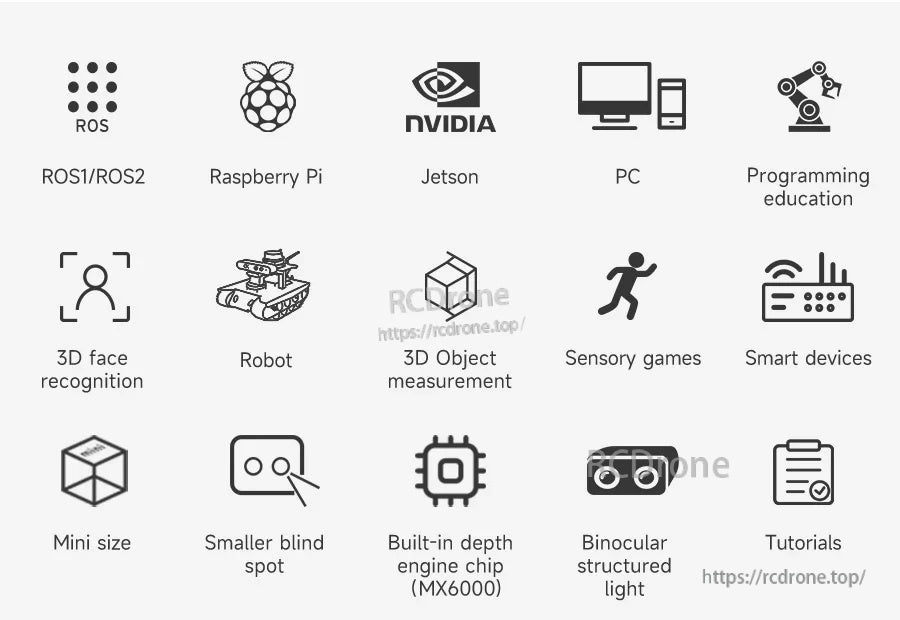
- 示例平台和場景:Raspberry Pi、Jetson、PC、編程教育、機器人、3D人臉識別、3D物體測量、感官遊戲、智能設備
規格
| 產品名稱 | AI VIEW |
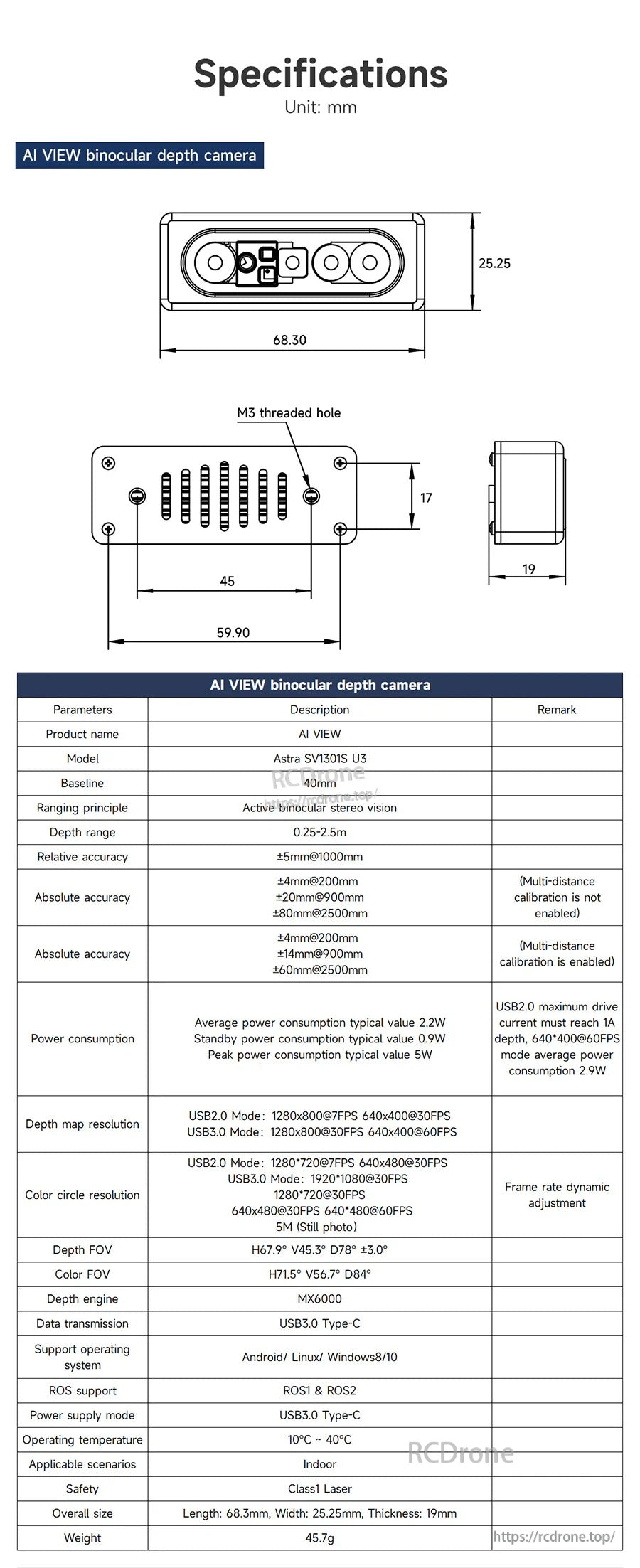
| 型號 | Astra SV1301S U3 |
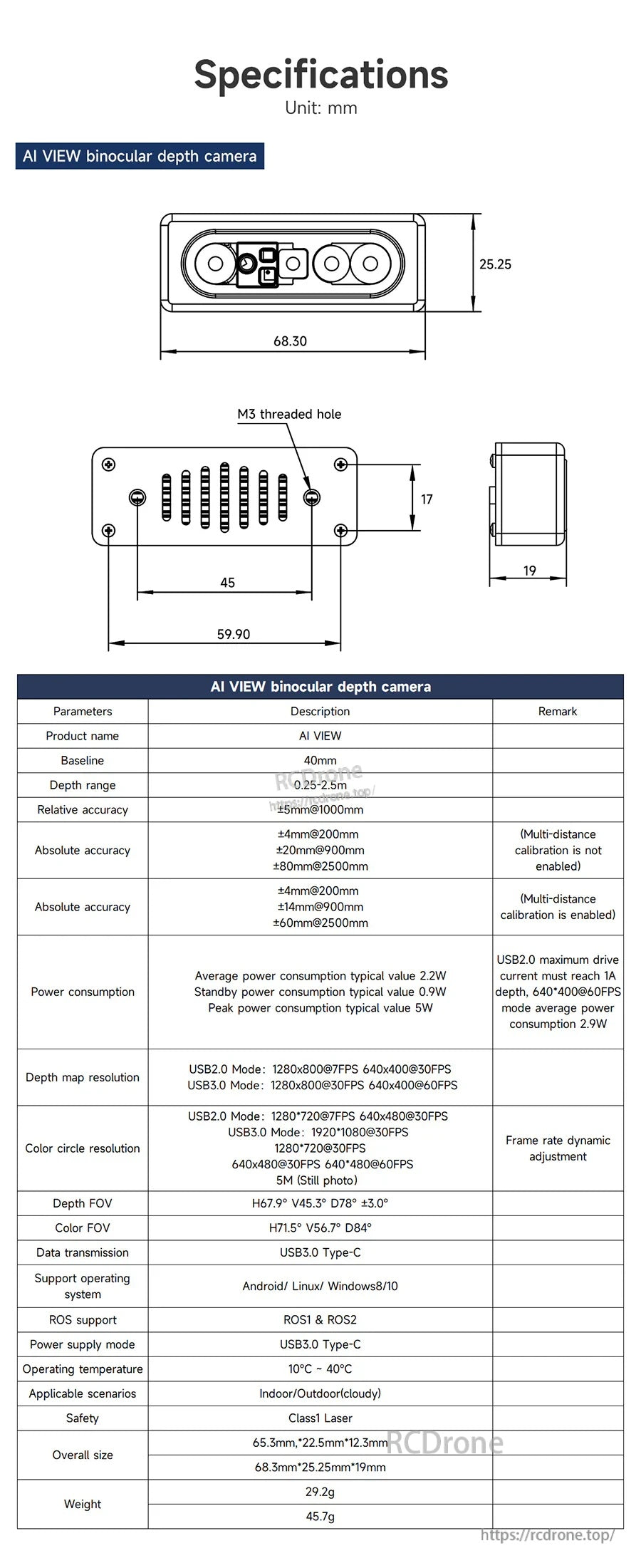
| 基線 | 40 mm |
| 測距原理 | 主動雙目立體視覺 |
| 深度範圍 | 0.25–2.5 m |
| 相對精度 | ±5 mm @ 1000 mm |
| 絕對精度(未啟用多距離校準) | ±4 mm @ 200 mm; ±20 mm @ 900 mm; ±80 mm @ 2500 mm |
| 絕對精度(啟用多距離校準) | ±4 mm @ 200 mm; ±14 mm @ 900 mm; ±60 mm @ 2500 mm |
| 功耗(典型) | 平均 2.2 W; 待機 0.9 W; 峰值 5 W |
| 功耗說明 | USB2.0 最大驅動電流必須達到 1 A;深度 640 × 400 @ 60 FPS 模式平均功耗 2.9 W |
| 深度圖解析度 | USB2.0 模式:1280 × 800 @ 7 FPS; 640 × 400 @ 30 FPS USB3.0 模式:1280 × 800 @ 30 FPS; 640 × 400 @ 60 FPS |
| 彩色圈解析度 | USB2.0 模式:1280 × 720 @ 7 FPS; 640 × 480 @ 30 FPS USB3.0 模式:1920 × 1080 @ 30 FPS;1280 × 720 @ 30 FPS;640 × 480 @ 30 FPS;640 × 480 @ 60 FPS 5M(靜態照片) |
| 幀率 | 幀率動態調整 |
| 深度視場角 | H67.9° V45.3° D78° ±3° |
| 彩色視場角 | H71.5° V56.7° D84° |
| 深度引擎 | MX6000 |
| 數據傳輸 | USB3.0 Type-C |
| 電源供應模式 | USB3.0 Type-C |
| 支持的操作系統 | Android / Linux / Windows8/10 |
| ROS 支援 | ROS1 & ROS2 |
| 操作溫度 | 10°C 至 40°C |
| 適用場景(列出) | 室內 室內/室外(陰天) |
| 安全性(列出) | Class1 激光 |
| 整體尺寸(列出) | 長度 68.3 mm; 寬度 25.25 mm; 厚度 19 mm 另列出:65.3 mm × 22.5 mm × 12.3 mm |
| 重量(列出) | 45.7 g 另列出:29.2 g |
| 機械圖說明(單位:mm) | 正面:68.30 (W) × 25.25 (H); 側面厚度 19; 安裝說明:M3 螺紋孔; 額外圖紙尺寸顯示:59.90, 45, 17 |
軟體 / SDK 說明(如列表所示)
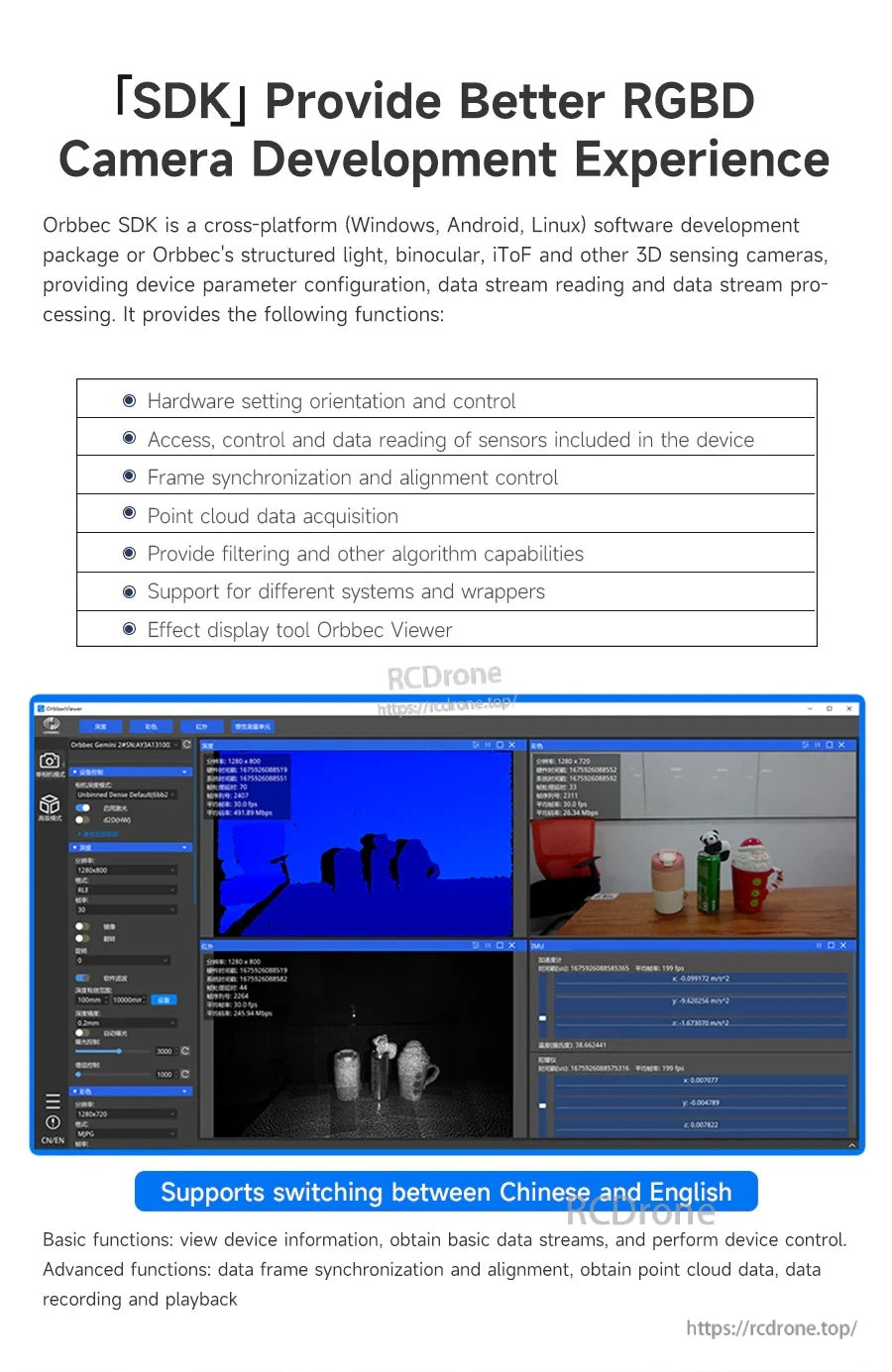
- “[SDK] 提供更好的 RGBD 相機開發體驗” (Orbbec SDK):跨平台(Windows、Android、Linux)適用於結構光、雙目、iToF 和其他 3D 感測相機
- 列出的功能:硬體設置方向和控制;感測器的訪問/控制/數據讀取;幀同步和對齊控制;點雲數據獲取;過濾和其他算法功能;支持不同系統和包裝器;顯示工具 Orbbec Viewer
- 查看器說明:支持中英文切換
- 列出的基本功能:查看設備信息;獲取基本數據流;執行設備控制
- 列出的高級功能:數據幀同步和對齊;獲取點雲數據;數據錄製和回放
可選配件
- 可選的機器人角度可調支架:120°可調角度(上30°,下90°)
- “將提供3D模型”(與攝像頭和角度可調支架一起列出)
應用
- 3D重建和環境建模(室內)
- 3D視覺映射、導航和測量(如列表所示)
- 近距離測量(盲區低至0。25 m)
- 物體識別、目標檢測和跟踪工作流程(如課程主題中所列)
教程
教程鏈接(官方學習頁面):http://www.yahboom.net/study/AIVIEW_Camera
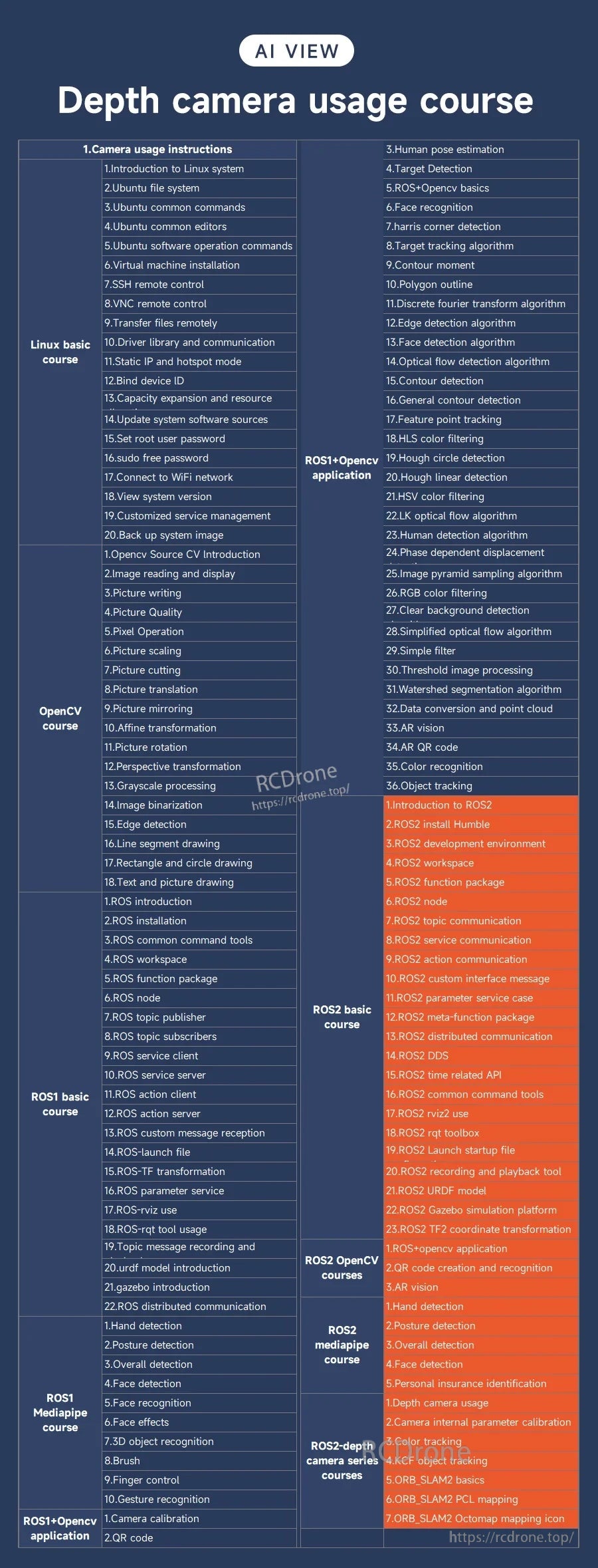
深度相機使用課程(主題列出)
- 相機使用說明 / Linux 基礎(列出): Linux 系統介紹;Ubuntu 文件系統;Ubuntu 常用命令;Ubuntu 常用編輯器;Ubuntu 軟件操作命令;虛擬機安裝;SSH 遠程控制;VNC 遠程控制;遠程傳輸文件;驅動庫和通信;靜態 IP 和熱點模式;綁定設備 ID;容量擴展和資源;更新系統軟件源;設置 root 用戶密碼;sudo 免密碼;連接 WiFi 網絡;查看系統版本;定制服務管理;備份系統映像
- OpenCV課程(列出): Opencv源CV介紹;圖像讀取和顯示;圖片寫入;圖片質量;像素操作;圖片縮放;圖片裁剪;圖片平移;圖片鏡像;仿射變換;圖片旋轉;透視變換;灰度處理;圖像二值化;邊緣檢測;線段繪製;矩形和圓形繪製;文字和圖片繪製
- ROS1基礎課程(列出): ROS介紹;ROS安裝;ROS常用命令工具;ROS工作空間;ROS功能包;ROS節點;ROS主題發布者;ROS主題訂閱者;ROS服務客戶端;ROS服務服務器;ROS動作客戶端;ROS動作服務器;ROS自定義消息接收;ROS-launch文件;ROS-TF變換;ROS參數服務;ROS-rviz使用;ROS-rqt工具使用;主題消息記錄和;urdf模型介紹;gazebo介紹;ROS分佈式通信
- ROS1 Mediapipe 課程 (列出): 手部檢測;姿勢檢測;整體檢測;人臉檢測;人臉識別;人臉效果;3D 物體識別;畫筆;手指控制;手勢識別
- ROS1 + OpenCV 應用 (列出): 相機校準;QR 碼
- 其他 ROS + OpenCV 主題 (列出): 3.人體姿態估計;4. 目標檢測;5. ROS+Opencv 基礎;6. 人臉識別;7. 哈里斯角點檢測;8. 目標跟踪算法;9. 輪廓矩;10. 多邊形輪廓;11. 離散傅里葉變換算法;12. 邊緣檢測算法;13. 人臉檢測算法;14. 光流檢測算法;15. 輪廓檢測;16. 通用輪廓檢測;17. 特徵點跟踪;18. HLS 顏色過濾;19. 霍夫圓檢測;20. 霍夫線性檢測;21. HSV 顏色過濾;22. LK 光流算法;23. 人體檢測算法;24. 相位依賴位移;25. 圖像金字塔採樣算法;26. RGB 顏色過濾;27. 清晰背景檢測;28. 簡化光流算法;29. 簡單過濾器;30. 閾值圖像處理;31. 分水嶺分割算法;32. 數據轉換和點雲;33. AR 視覺;34. AR 二維碼;35. 顏色識別;36. 物體追蹤
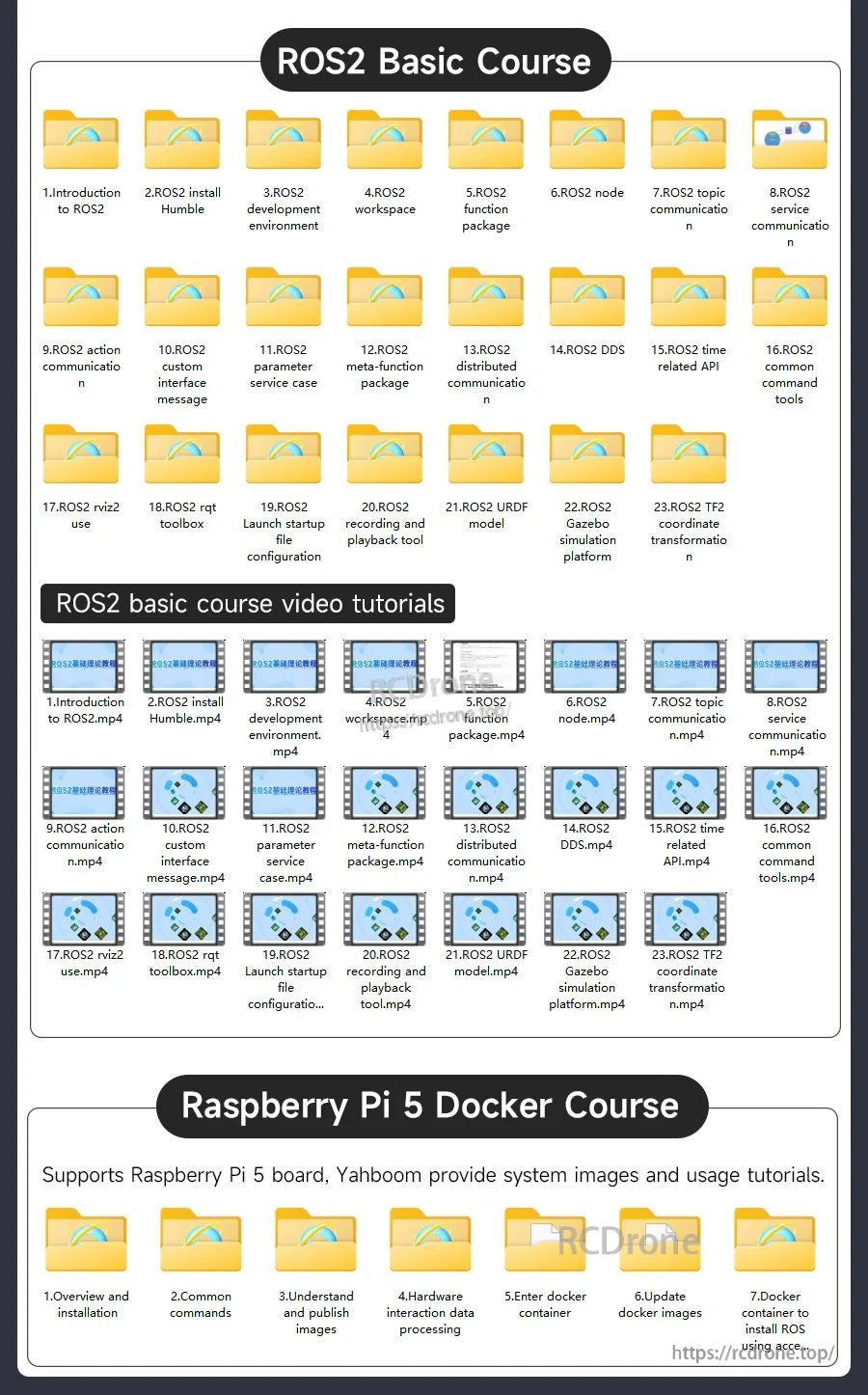
- ROS2 基礎課程(列表): ROS2 介紹;ROS2 安裝 Humble;ROS2 開發環境;ROS2 工作空間;ROS2 功能包;ROS2 節點;ROS2 主題通信;ROS2 服務通信;ROS2 行動通信;ROS2 自定義介面訊息;ROS2 參數服務案例;ROS2 元功能包;ROS2 分佈式通信;ROS2 DDS;ROS2 時間相關 API;ROS2 常用命令工具;ROS2 rviz2 使用;ROS2 rqt 工具箱;ROS2 啟動文件;ROS2 錄製和回放工具;ROS2 URDF 模型;ROS2 Gazebo 模擬平台;ROS2 TF2 坐標轉換
- ROS2 OpenCV 課程(列表): ROS+opencv 應用;QR 碼創建和識別;AR 視覺
- ROS2 mediapipe 課程(列表): 手部檢測;姿勢檢測;整體檢測;面部檢測;個人保險識別
- ROS2 深度相機系列課程(列表): 深度相機使用;相機內部參數校準;顏色追蹤;KCF 物體追蹤;ORB_SLAM2 基礎;ORB_SLAM2 PCL 映射;ORB_SLAM2 Octomap 映射
如有售前兼容性問題或售後支持,請聯繫[email protected] or訪問https://rcdrone.top/.
詳細資訊

AI VIEW 結合雙目立體視覺和結構光,為 ROS 機器人項目提供快速的 RGB-D 深度感測。
適用於包括 Raspberry Pi、Jetson 和 PC 在內的常見機器人平台,用於地圖繪製、測量和感知任務。
詳細的機械圖紙和核心規格有助於外殼設計和機器人整合規劃。

雙目結構光使用左右匹配和三角測量來提高深度感知的準確性。
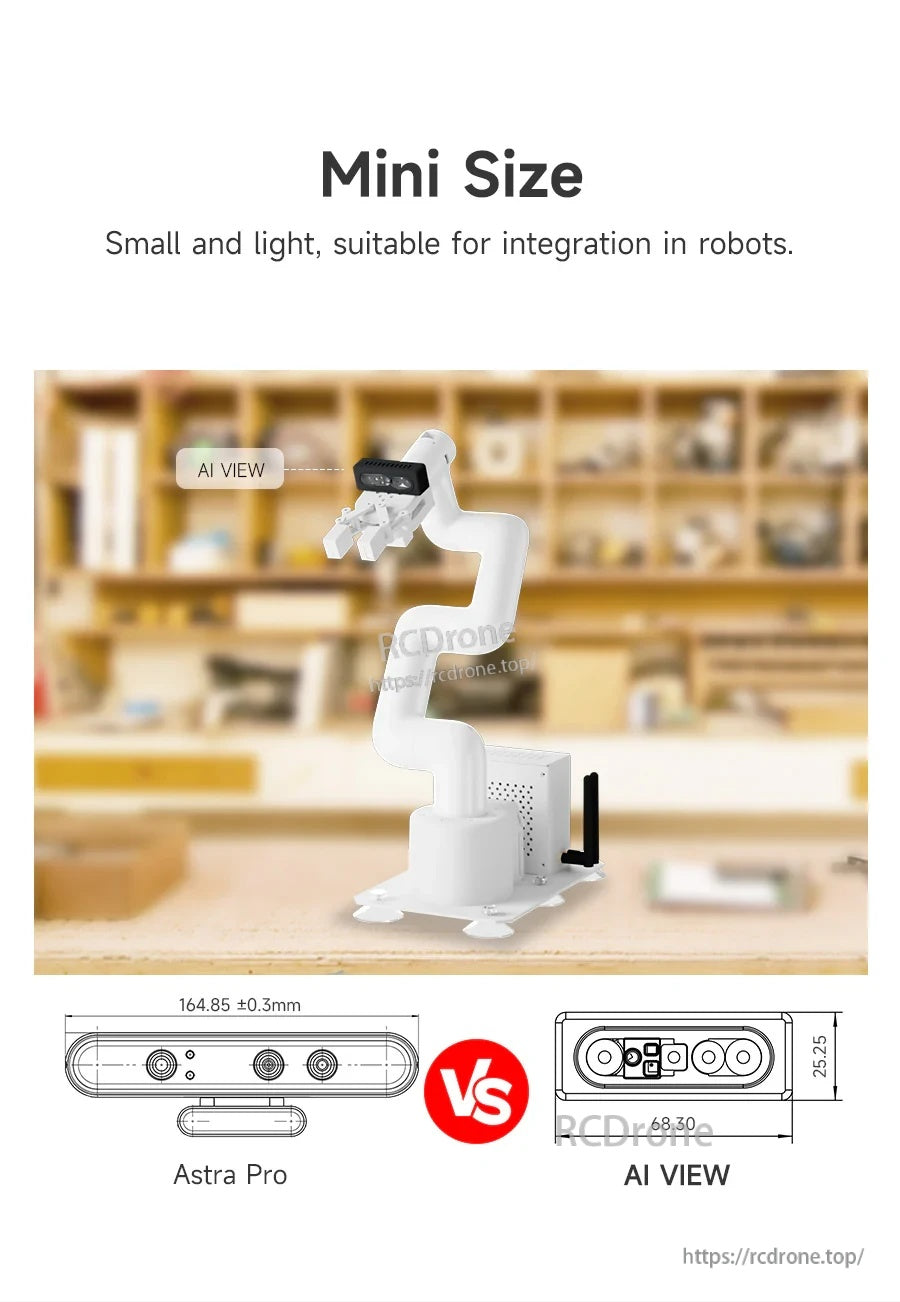
緊湊的外形尺寸易於安裝在機器人手臂和移動平台上,適合空間和重量要求。
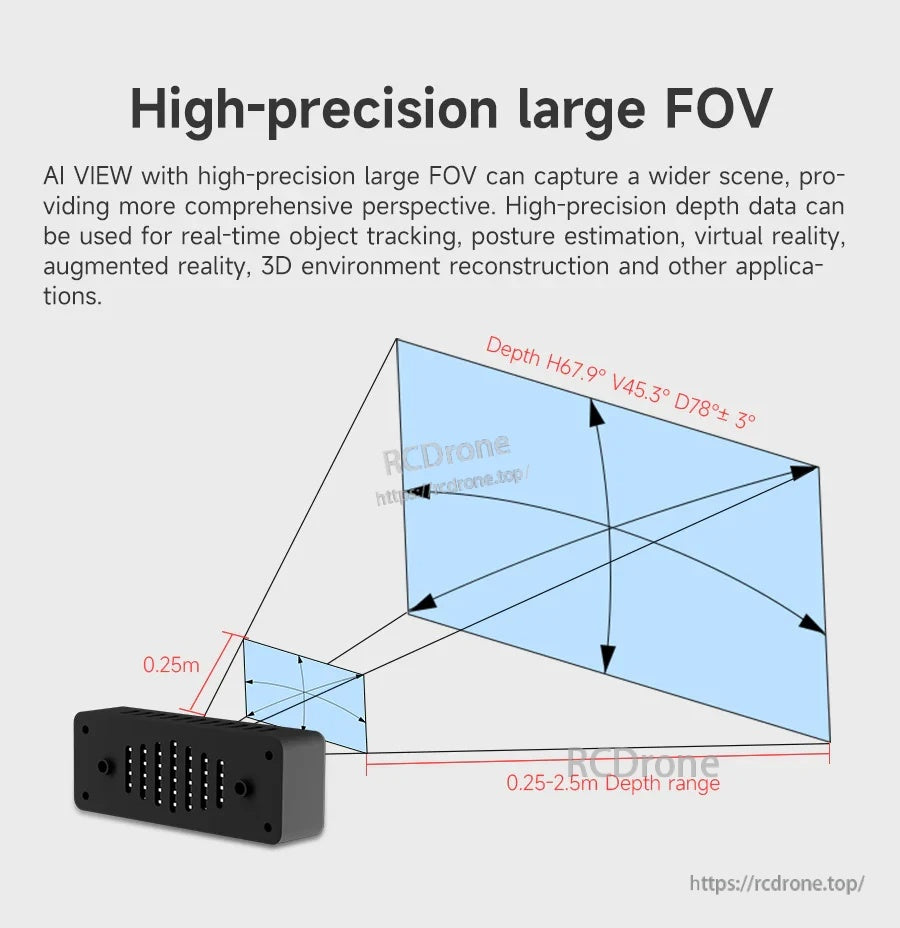
寬深度視野支持近距離感知和更廣泛的場景捕捉,用於導航和跟踪。
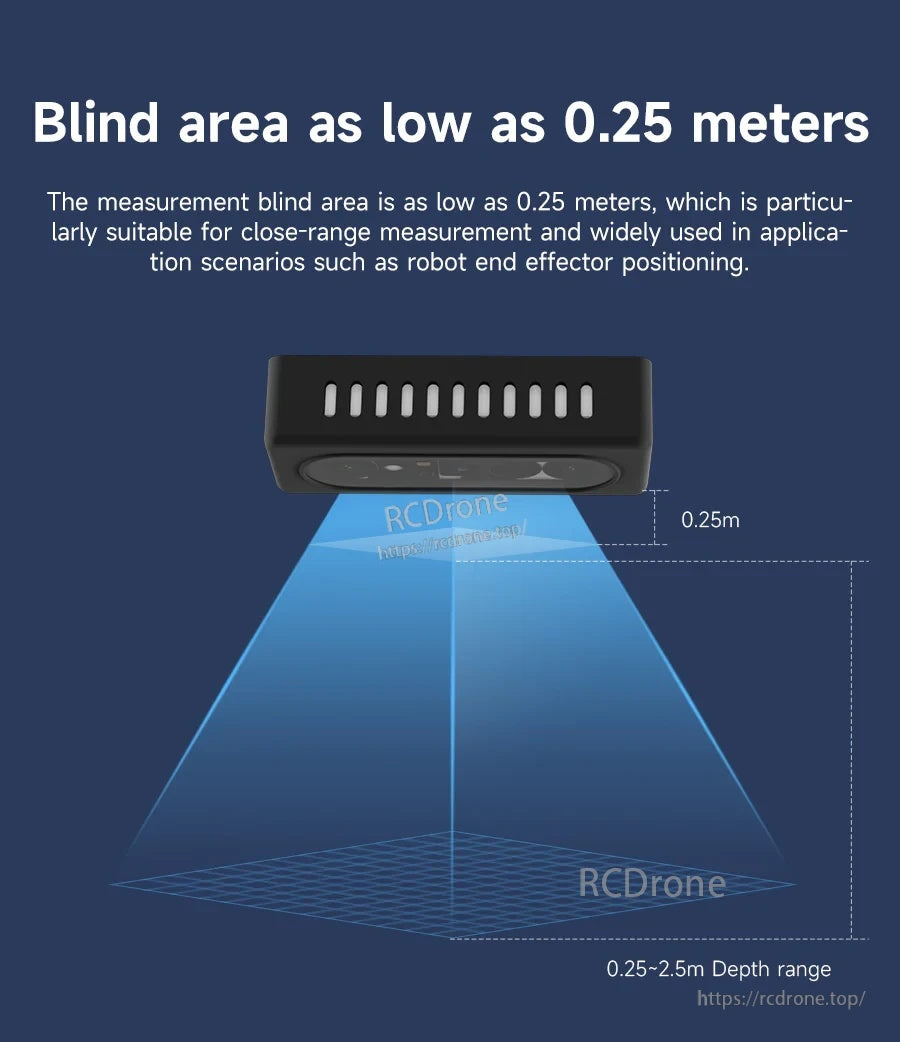
短 0.25 米的最小範圍有助於近場感測,例如末端執行器定位。
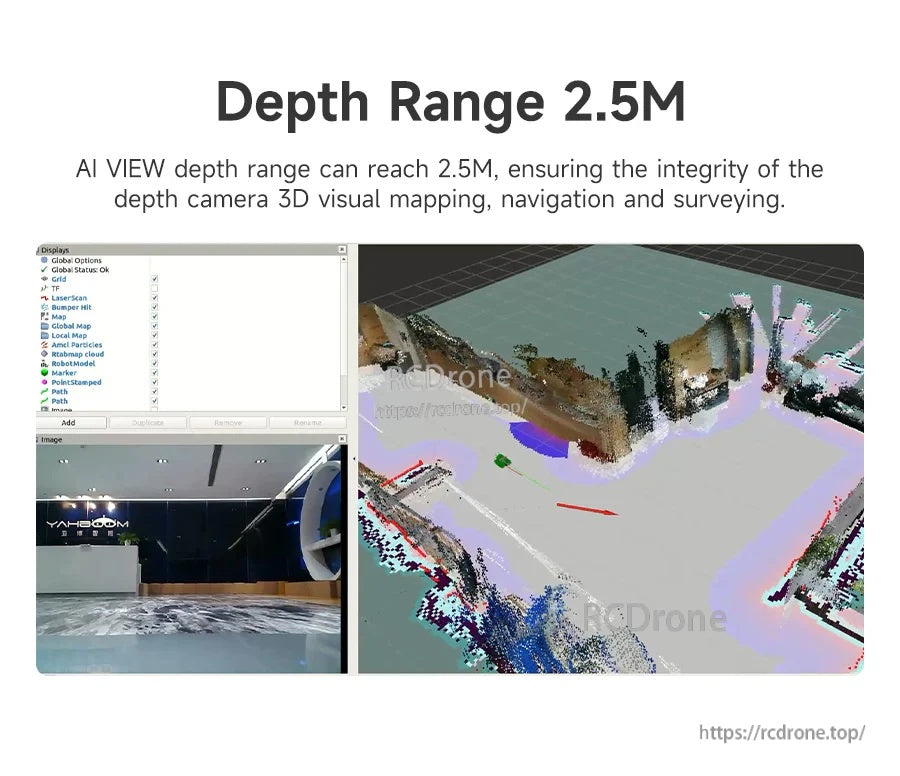
深度輸出可用於3D視覺映射工作流程,例如點雲和環境重建。

設計以更好地抵抗強光,建議在室內環境中使用以獲得最佳效果。

ROS1和ROS2支持有助於簡化集成到現有機器人軟件堆棧中。
SDK工具提供設備配置、流捕獲和點雲數據訪問以供開發。

可選的可調支架允許在機器人原型製作和測試期間靈活調整安裝角度。

可單獨購買攝像頭或與可調角度支架捆綁銷售,以便於安裝。
逐步課程材料涵蓋從基本設置到高級功能的常見RGB-D主題。

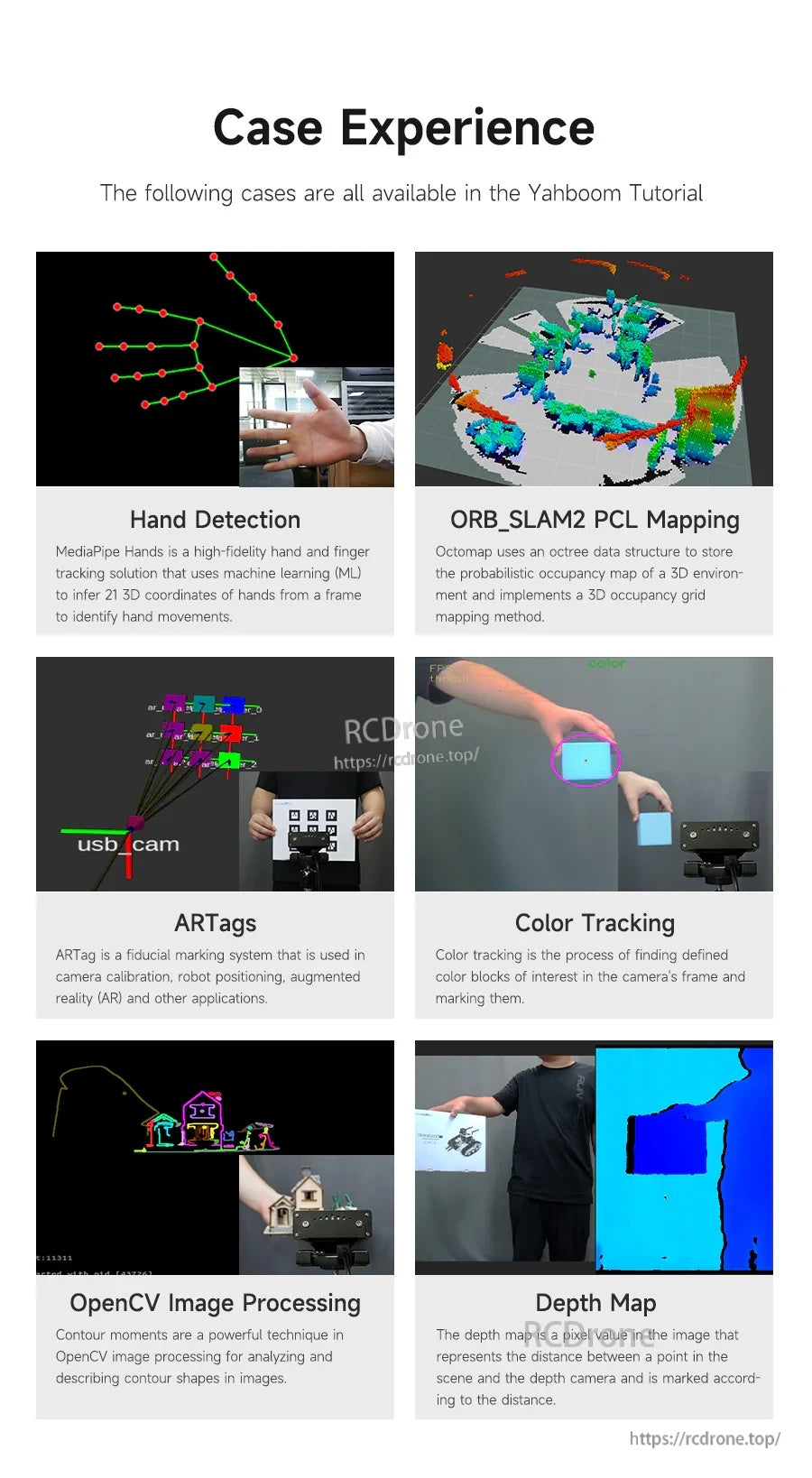
示例項目包括SLAM映射、AR標籤、OpenCV處理和深度圖應用以供學習。
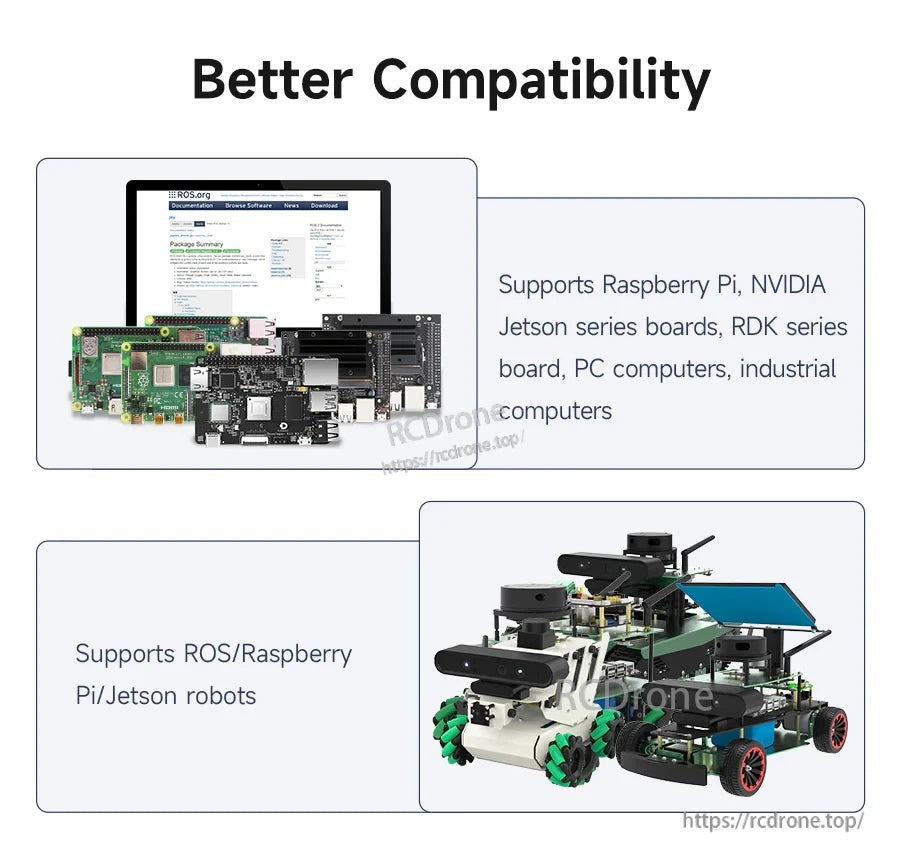
AI VIEW雙目結構光RGBD深度相機被介紹為與Raspberry Pi、NVIDIA Jetson和ROS1/ROS2機器人平台兼容。
SDK包括ROS1/ROS2的包裝器以及常見語言和平台如C/C++、Java、Python、Windows、Linux、Android和Unity。

Yahboom AI VIEW結構光RGB-D相機具有緊湊的黑色外殼,配有雙前鏡頭和USB-C連接,用於PC或機器人設置。
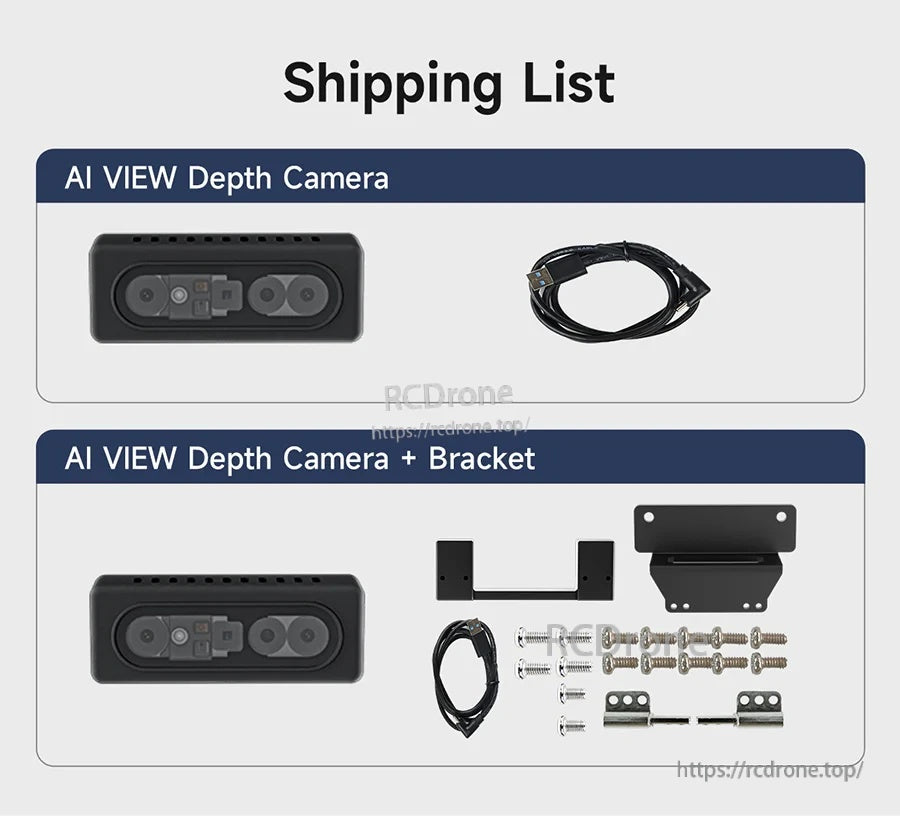
Yahboom AI VIEW深度相機套件包括USB‑C電纜以及安裝支架和硬件,以便更輕鬆地集成到機器人中。
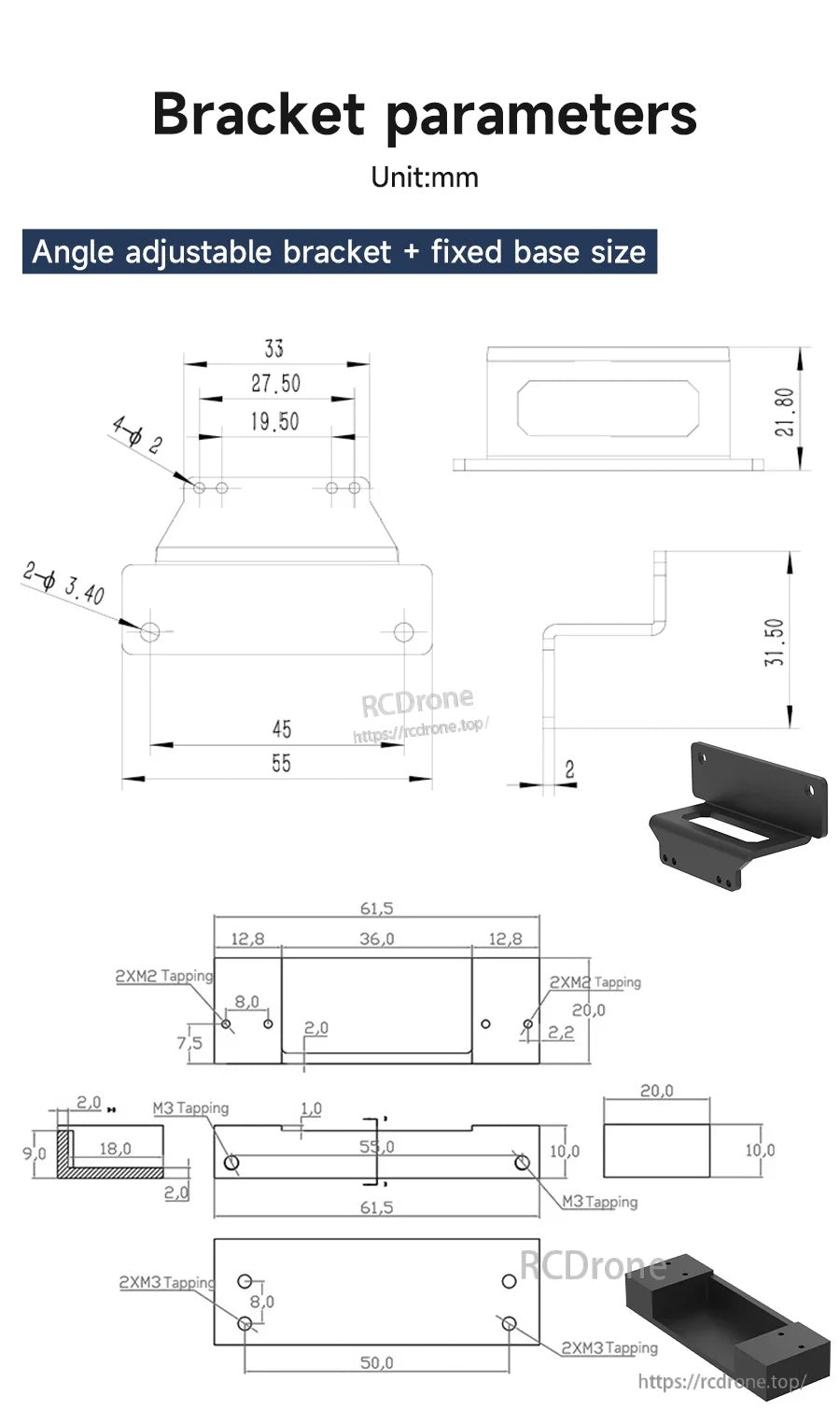
可調角度支架和固定底板尺寸有助於計劃安裝和孔間距,以實現整潔的機器人安裝。

Yahboom AI VIEW RGB-D 深度相機使用緊湊的雙目前置佈局,易於安裝在 ROS 機器人上。
Related Collections









