



























DOFBOT Pro 6自由度3D深度視覺機械臂,適用於Jetson Nano 4GB / Orin Nano SUPER / Orin NX SUPER
DOFBOT Pro 6自由度3D深度視覺機械臂,適用於Jetson Nano 4GB / Orin Nano SUPER / Orin NX SUPER
Yahboom
無法載入取貨服務供應情況
概述
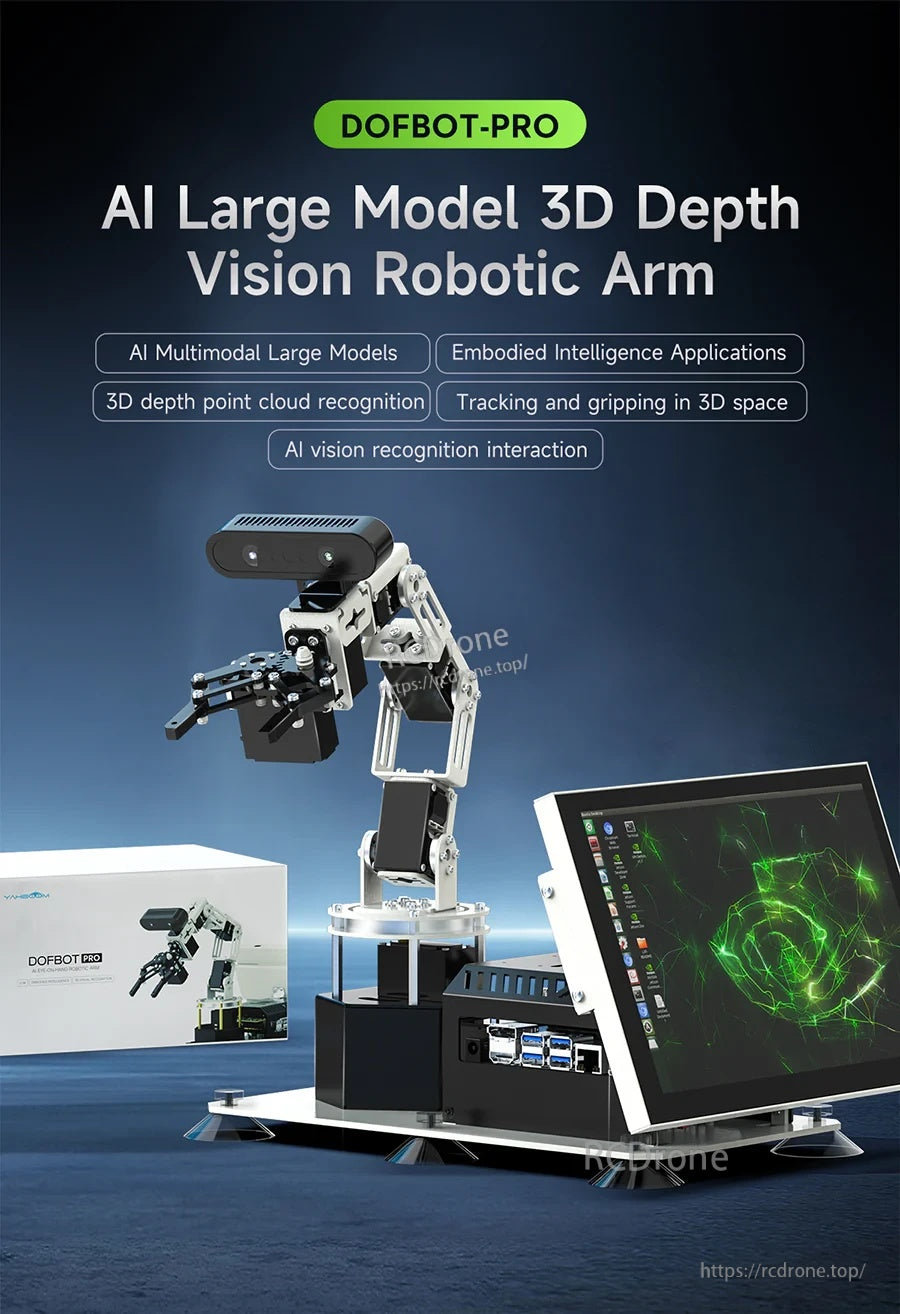
DOFBOT PRO 是一款桌面級 3D AI 視覺機械臂 ,專為 ROS 教育和開發而設計。它結合了 6 自由度運動關節結構、3D 深度攝像頭和 NVIDIA Jetson 系列控制板,通過 ROS、正/逆運動學和視覺感知來簡化複雜的運動控制,以實現 3D 空間識別、跟踪和抓取。
影片
主要特點
- Jetson 平台兼容性: 兼容 Jetson Nano 4GB / Jetson Orin Nano SUPER / Jetson Orin NX SUPER 控制板;支持 GPU 加速模型訓練和 Python 開發。
- 3D 深度點雲識別: RGB + 深度 (RGB+D) 融合檢測,用於 3D 定位、跟踪和抓取任務。
- ROS 運動規劃和模擬: 支持 MoveIt 運動規劃和 RViz 機器人模擬;支持 2D 和 3D 視覺交互。
- 6-DOF 鋁合金結構: 精密加工的鋁合金機身;高精度伺服器實現平滑的多軸運動。
- 跨平台控制: 支持應用程式控制(Android/iOS)、無線手柄控制和PC網頁控制。
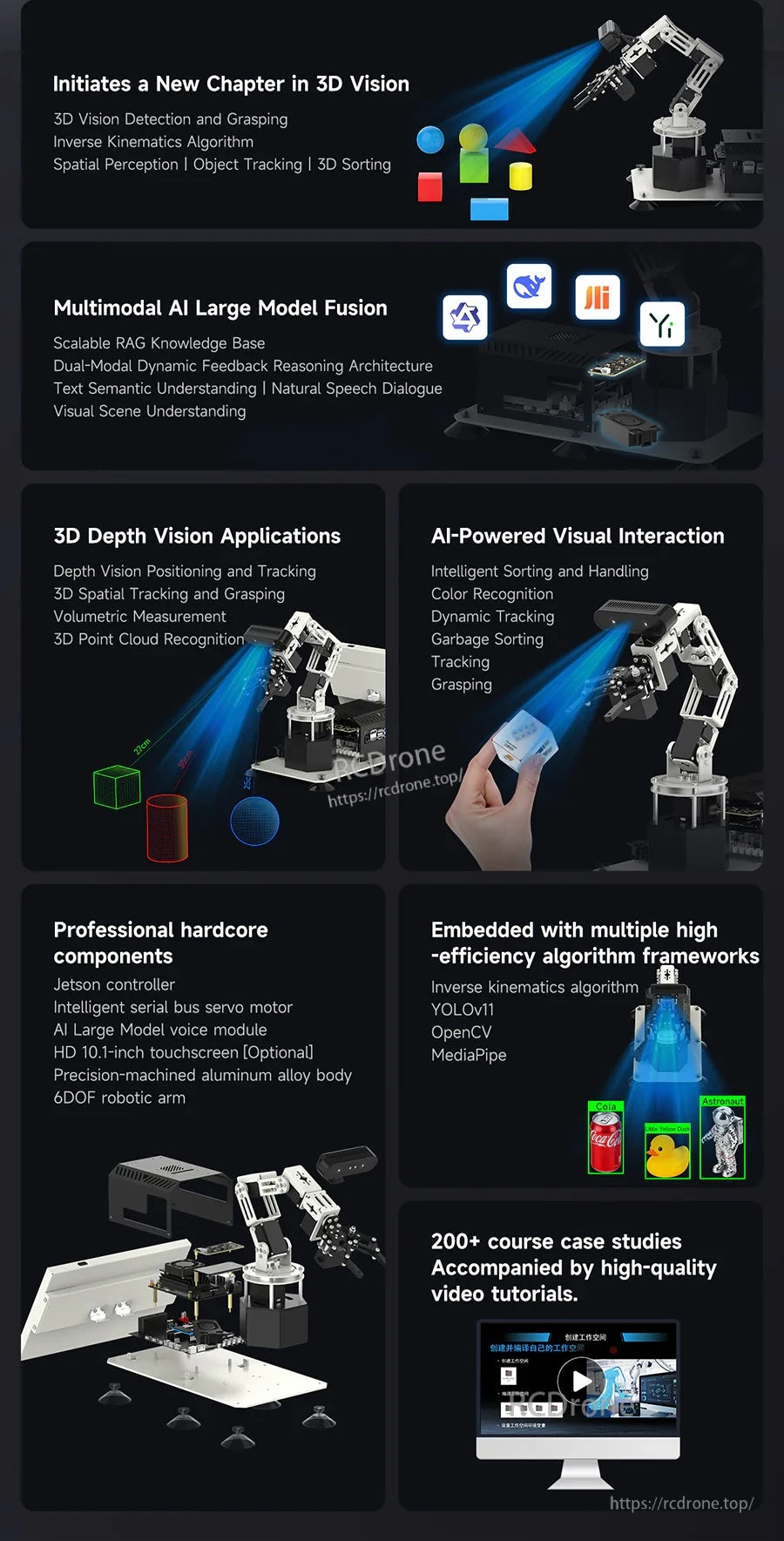
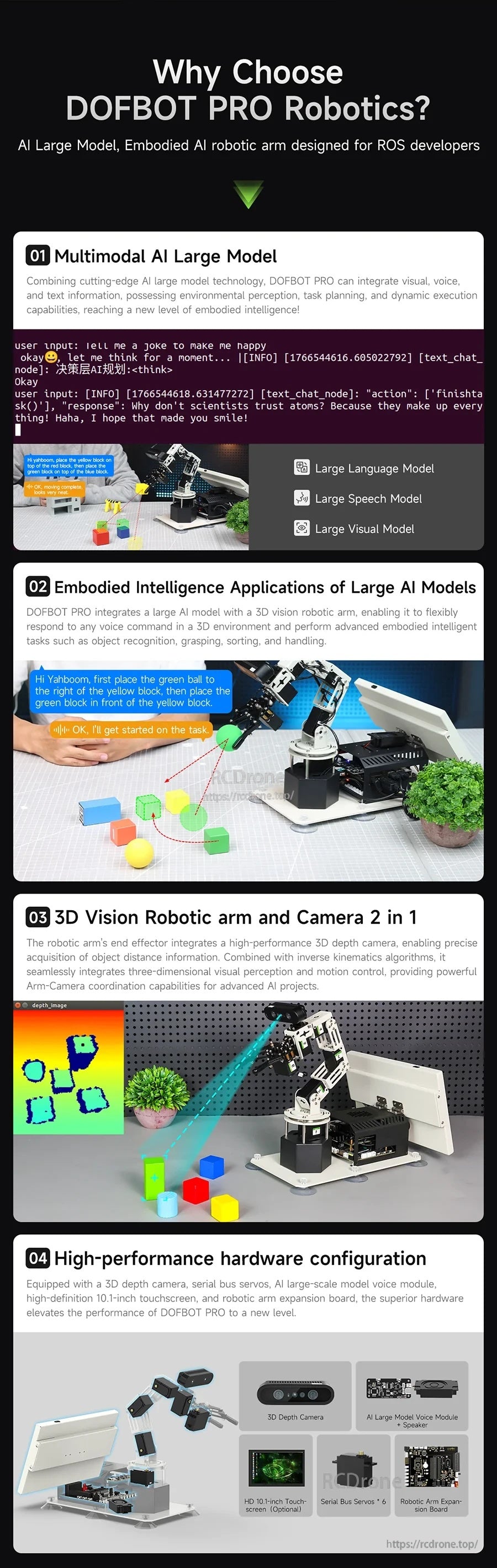
- 多模態/大型模型概念(如提供): 大型語言模型、大型語音模型、大型視覺模型;包括可擴展的RAG知識庫和“雙模態動態反饋推理架構”描述。
- 列出的算法框架: 逆運動學算法、YOLOv11、OpenCV、MediaPipe。
如需產品選擇和技術支持,請聯繫 https://rcdrone.top/ 或發送電子郵件至 [email protected].
規格
DOFBOT-PRO(機械臂系統)
| 主控 | Jetson Nano B01 / Jetson Orin Nano SUPER / Jetson Orin NX SUPER |
|---|---|
| 自由度 | 6 |
| 臂展 | 350mm |
| 夾爪開合 | 6cm |
| 可重複定位精度 | ±0.5mm |
| 結構類型 | 傳統機械臂結構 |
| 攝像頭 | DABAI DCW2 深度攝像頭 |
| 視覺維度 | 具有深度距離信息的3D圖像 |
| 語音 | AI大模型語音模塊 + 揚聲器 |
| 顯示 | 10.1英寸顯示屏 |
| 功能 | 互聯控制;MoveIt運動規劃;RViz機器人模擬;2D視覺交互;3D視覺交互;AI大模型 |
| 定位(如描述) | 嵌入式AI / AI大模型 / 3D深度視覺機器人手臂 |
ROS機器人手臂配置(如列表)
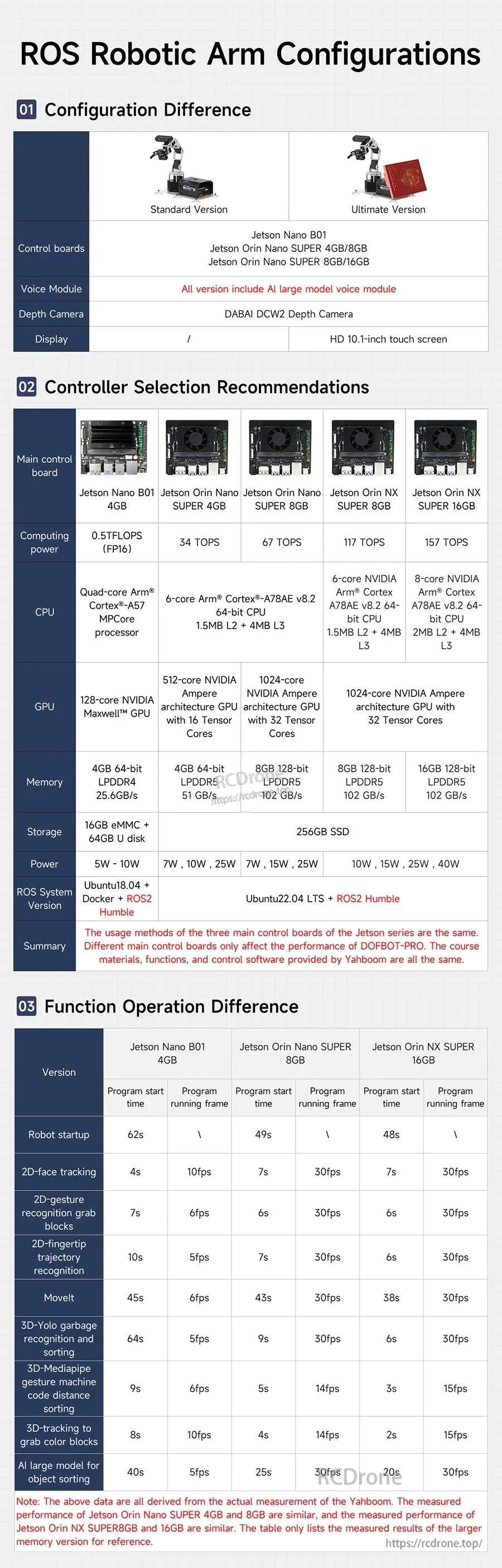
| 版本 | 標準版 | 終極版 |
|---|---|---|
| 控制板 | Jetson Nano B01; Jetson Orin Nano SUPER 4GB/8GB; Jetson Orin Nano SUPER 8GB/16GB | Jetson Nano B01; Jetson Orin Nano SUPER 4GB/8GB; Jetson Orin Nano SUPER 8GB/16GB |
| 語音模塊 | 所有版本均包含AI大模型語音模塊 | |
| 深度攝像頭 | DABAI DCW2 深度攝像頭 | |
| 顯示屏 | / | 高清 10.1英寸觸控螢幕 |
控制器選擇建議(顯示Jetson板規格)
| 項目 | Jetson Nano B01 4GB | Jetson Orin Nano SUPER 4GB | Jetson Orin Nano SUPER 8GB | Jetson Orin NX SUPER 8GB | Jetson Orin NX SUPER 16GB |
|---|---|---|---|---|---|
| 計算能力 | 0.5TFLOPS (FP16) | 34 TOPS | 67 TOPS | 117 TOPS | 157 TOPS |
| CPU | 四核 Arm Cortex-A57 MPCore 處理器 | 6核 Arm Cortex-A78AE v8.2 64位元 CPU;1.5MB L2 + 4MB L3 | 6核 Arm Cortex-A78AE v8.2 64位元 CPU;1.5MB L2 + 4MB L3 | 6核 NVIDIA Arm Cortex A78AE v8.2 64位元 CPU;1.5MB L2 + 4MB L3 | 8核 NVIDIA Arm Cortex A78AE v8.2 64-bit CPU; 2MB L2 + 4MB L3 |
| GPU | 128-core NVIDIA Maxwell GPU | 512-core NVIDIA Ampere 架構 GPU,配備 16 個 Tensor 核心 | 1024-core NVIDIA Ampere 架構 GPU,配備 32 個 Tensor 核心 | 1024-core NVIDIA Ampere 架構 GPU,配備 32 個 Tensor 核心 | 1024-core NVIDIA Ampere 架構 GPU,配備 32 個 Tensor 核心 |
| 記憶體 | 4GB 64-bit LPDDR4; 25.6GB/s | 4GB 64位 LPDDR5; 51GB/s | 8GB 128位 LPDDR5; 102GB/s | 8GB 128位 LPDDR5; 102GB/s | 16GB 128位 LPDDR5; 102GB/s |
| 存儲 | 16GB eMMC + 64GB U盤 | 256GB SSD | |||
| 電源 | 5W - 10W | 7W , 10W , 25W | 7W , 15W , 25W | 10W , 15W , 25W , 40W | 10W , 15W , 25W , 40W |
| ROS 系統版本 | Ubuntu18.04 + Docker + ROS2 Humble | Ubuntu22.04 LTS + ROS2 Humble | |||
功能操作差異(顯示測量結果)
| 版本 | Jetson Nano B01 4GB | Jetson Orin Nano SUPER 8GB | Jetson Orin NX SUPER 16GB |
|---|---|---|---|
| 機器人啟動(程序啟動時間) | 62秒 | 49秒 | 48秒 |
| 2D-人臉追蹤(程序啟動時間 / 程序運行幀率) | 4秒 / 10幀每秒 | 7秒 / 30幀每秒 | 7秒 / 30幀每秒 |
| 2D-手勢識別抓取方塊(程序啟動時間 / 程序運行幀率) | 7秒 / 6幀每秒 | 6秒 / 30幀每秒 | 6秒 / 30幀每秒 |
| 2D-指尖軌跡識別(程序啟動時間 / 程序運行幀率) | 10秒 / 5幀每秒 | 7秒 / 30幀每秒 | 6秒 / 30幀每秒 |
| MoveIt(程式啟動時間 / 程式運行幀率) | 45秒 / 6幀每秒 | 43秒 / 30幀每秒 | 38秒 / 30幀每秒 |
| 3D-Yolo 垃圾識別與分類(程式啟動時間 / 程式運行幀率) | 64秒 / 5幀每秒 | 9秒 / 30幀每秒 | 6秒 / 30幀每秒 |
| 3D-Mediapipe 手勢機器碼距離排序(程式啟動時間 / 程式運行幀率) | 9秒 / 6幀每秒 | 5秒 / 14幀每秒 | 3秒 / 15幀每秒 |
| 3D-追蹤抓取色塊(程式啟動時間 / 程式運行幀率) | 8秒 / 10幀每秒 | 4秒 / 14幀每秒 | 2秒 / 15幀每秒 |
| AI 大模型物體分類(程式啟動時間 / 程式運行幀率) | 40秒 / 5幀每秒 | 25秒 / 30幀每秒 | 20秒 / 30幀每秒 |
應用
- 3D視覺檢測和抓取;空間感知;物體追蹤;3D分類
- 深度測距(距離測量)、形狀識別、高度測量、體積測量
- 深度視覺定位和追蹤;3D空間追蹤和抓取;3D點雲識別
- AI驅動的視覺互動:智能分類和處理、顏色識別、動態追蹤、垃圾分類、追蹤、抓取
- 多模態工作流程描述:視頻分析、長指令運動控制、異常高度分類、意圖推斷(RAG知識庫)、KCF物體追蹤算法、基於YOLOv11的識別任務
體積測量演示的示例物體尺寸:30*30*30mm 立方體,30*30*30mm 圓柱體,30*30*60mm 圓柱體。範例距離覆蓋顯示包括 240.0mm 和 190.0mm。
手冊
教程連結:http://www.yahboom.net/study/DOFBOT-Pro
詳情
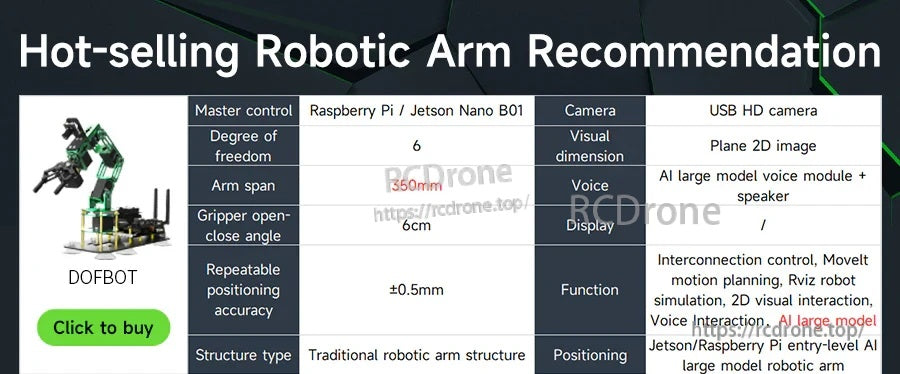
一目了然地比較熱門桌面機械臂選項,包括自由度、伸展範圍、夾爪範圍和控制平台。
快速規格快照有助於選擇適合 ROS 學習、模擬和基本視覺任務的正確型號。
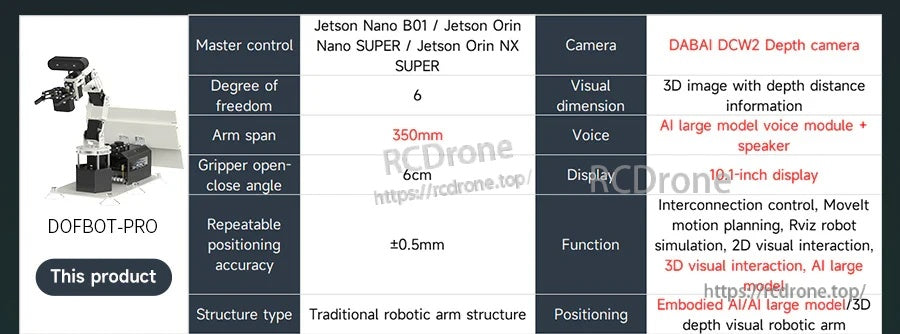
DOFBOT-PRO 結合了 6 自由度機械臂、RGB+D 深度感測和 Jetson 相容性,用於 3D 感知和抓取開發。
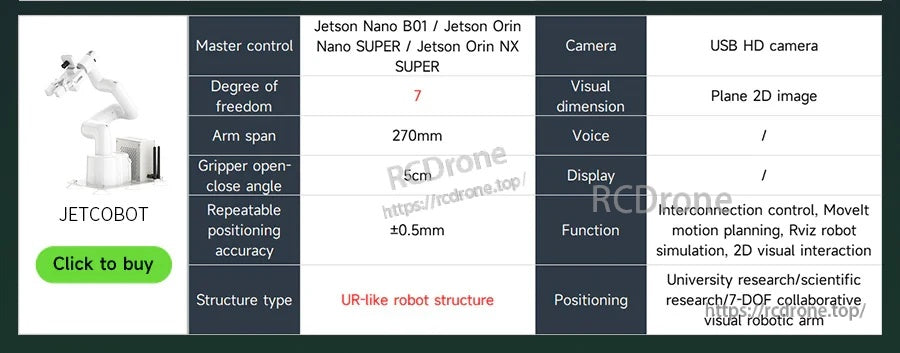
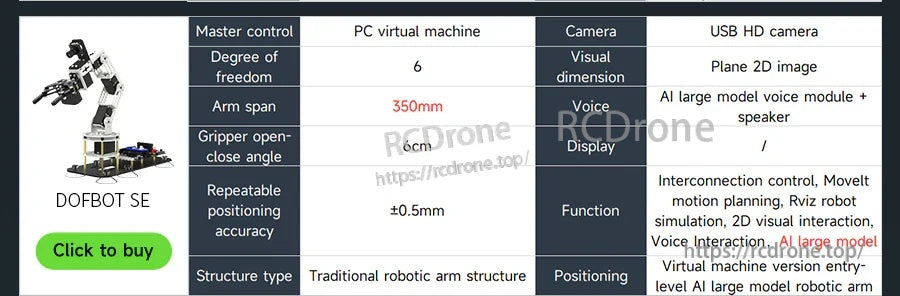
為需要不同臂結構和相機設置的用戶提供替代配置詳情。
為 ROS 教育和開發而設計,該套件將緊湊的 6 自由度機械臂與深度視覺和集成桌面式設置相結合。

設計用於運動規劃和感知工作流程,例如運動學、目標識別、跟踪和在3D空間中的抓取。
關鍵模塊涵蓋深度感知、AI交互概念以及常見機器人管道中使用的軟件框架。
硬件和軟件亮點總結了用於構建視覺+ ROS演示和課堂實驗的內容。

多種Jetson板選項有助於從入門級原型製作擴展到更高性能的AI工作負載。
使用配置矩陣將控制器板和功能集與您的ROS項目需求相匹配。

深度視覺增加了距離感知理解,比僅2D更可靠的定位、識別和抓取規劃。
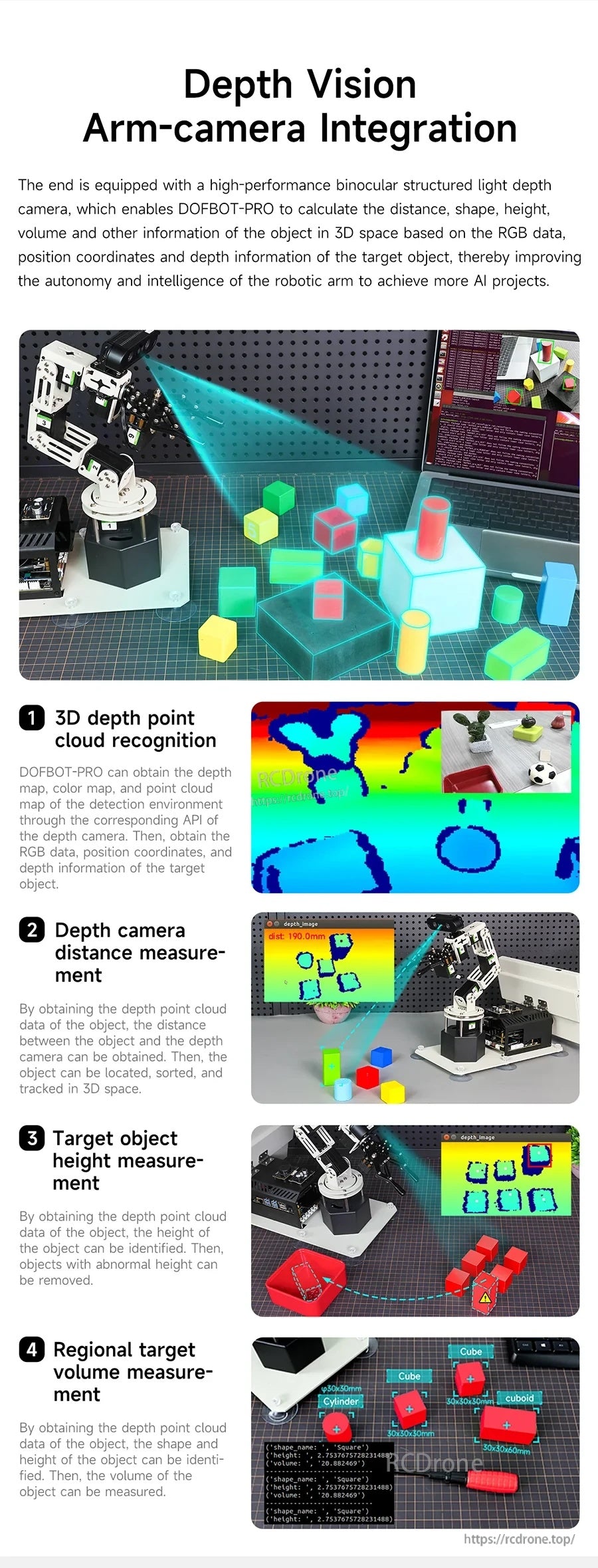
臂-相機校準支持點雲識別和基於深度的測量等任務,以進行3D空間交互。
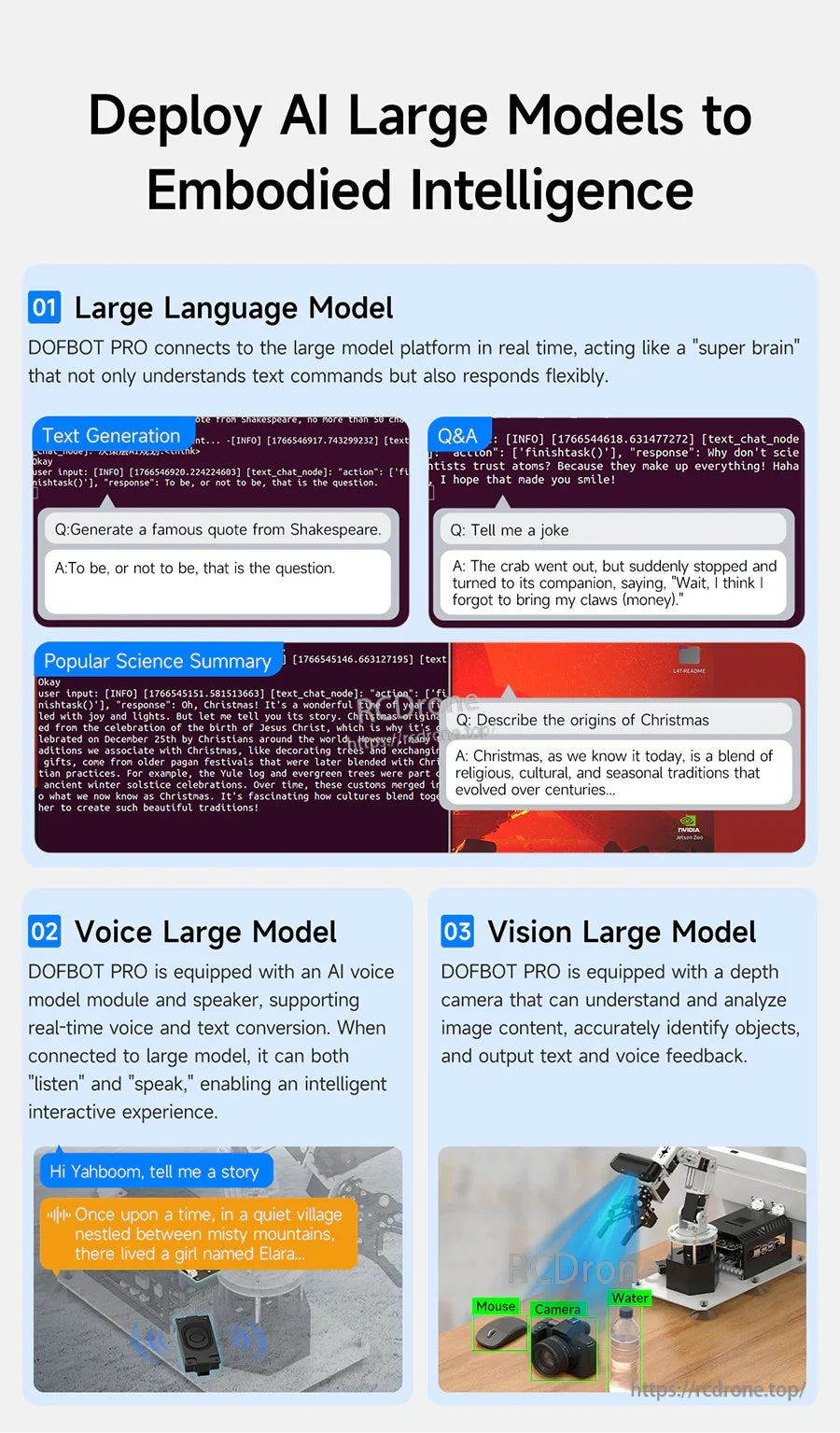
多模態互動概念包括文本、語音和視覺能力,以構建更豐富的人機工作流程。

應用範例專注於結合感知與命令驅動控制的排序和處理行為。

實用演示展示了圍繞視覺和互動邏輯構建的跟踪、排序和動作選擇任務。
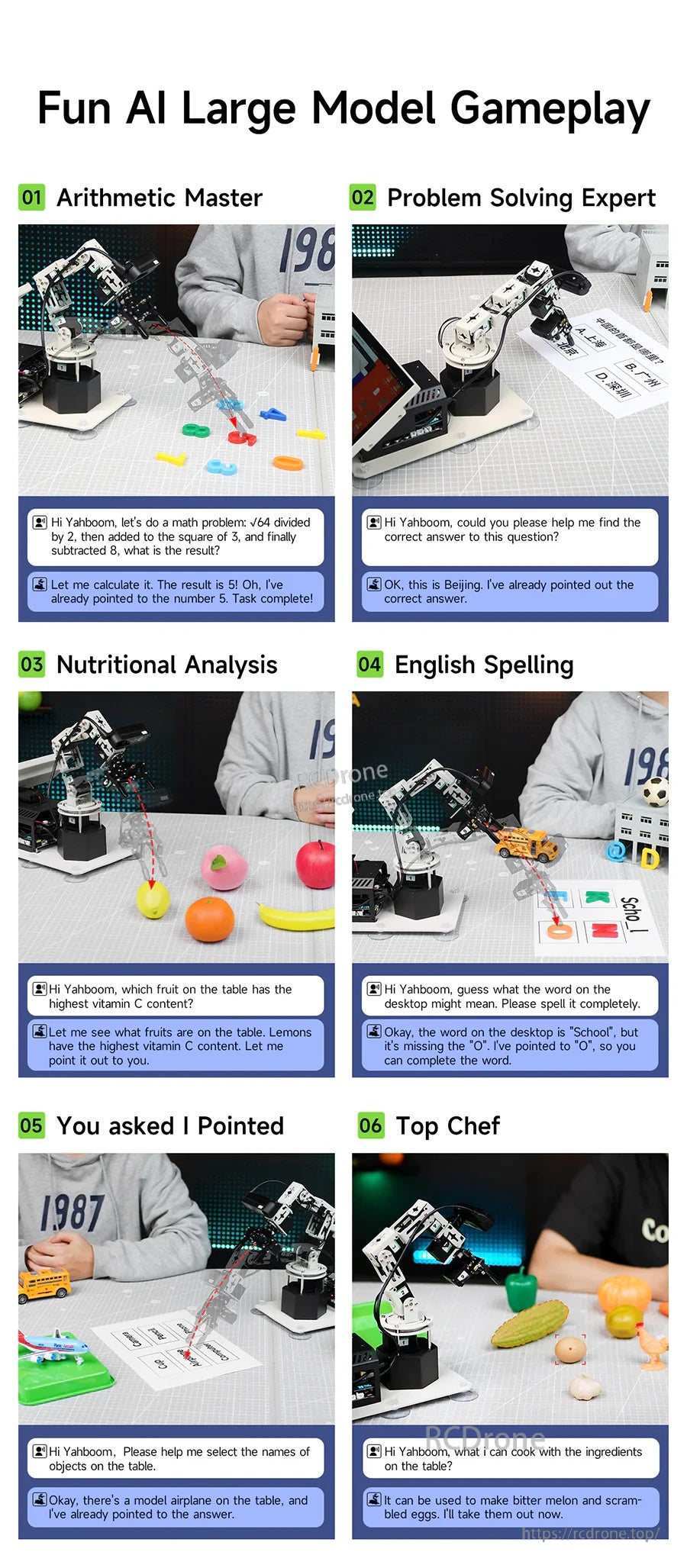
互動挑戰式活動提供了可接近的場景,用於測試感知、推理和控制迴路。
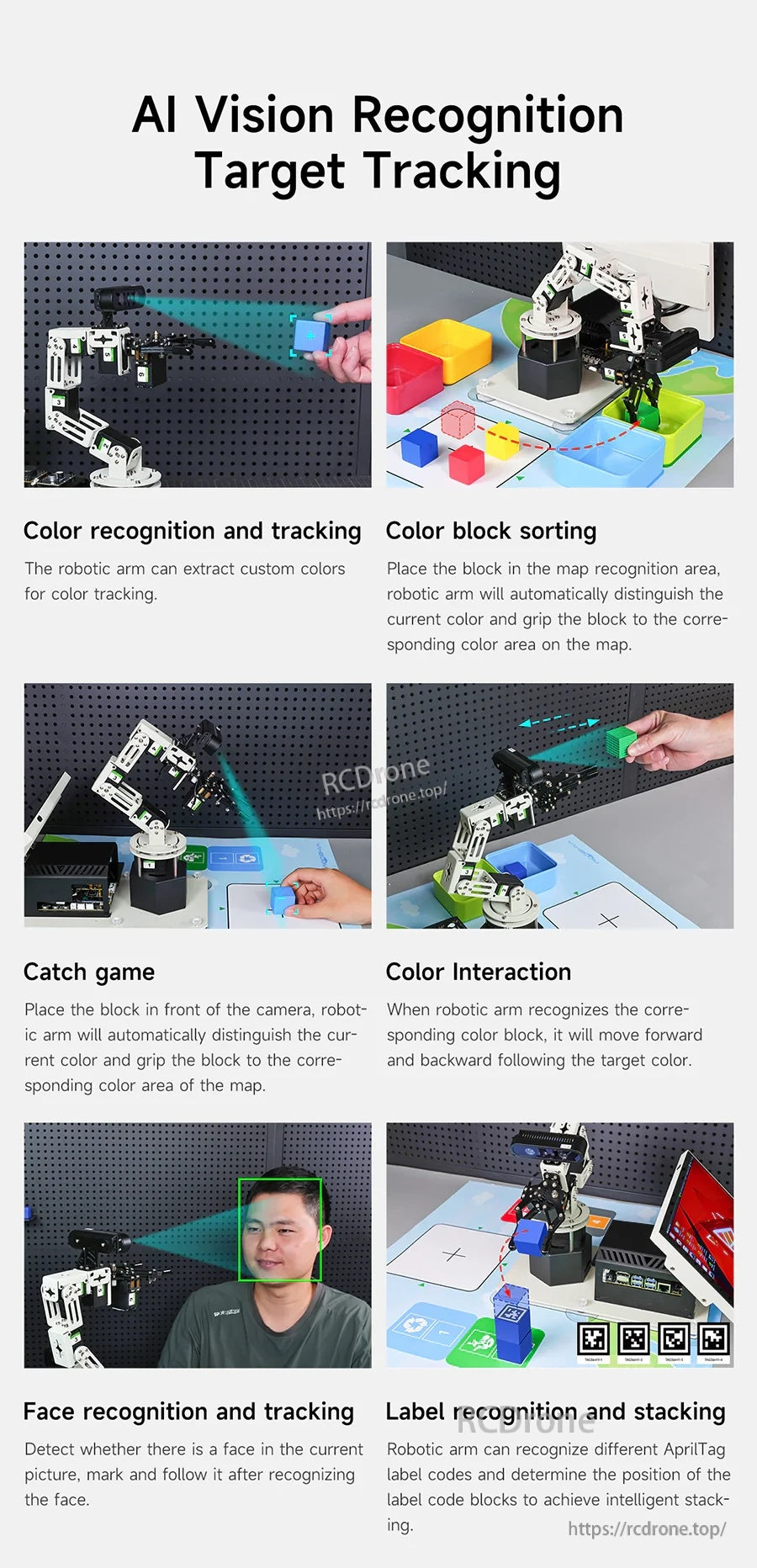
視覺識別範例涵蓋基於顏色的跟踪、積木排序、互動遊戲和基於標籤的堆疊。
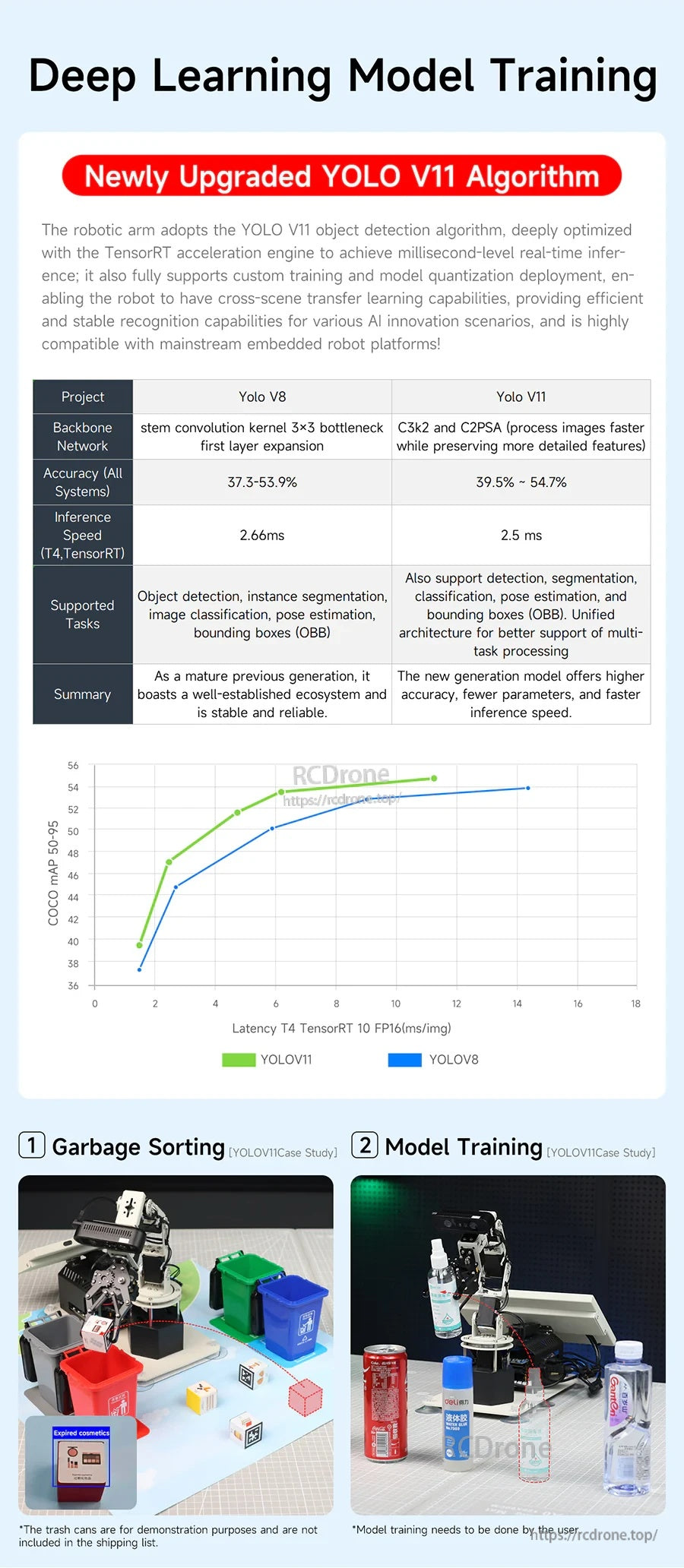
訓練筆記和性能曲線概述了包含的深度學習工作流程方向,用於物體檢測任務。
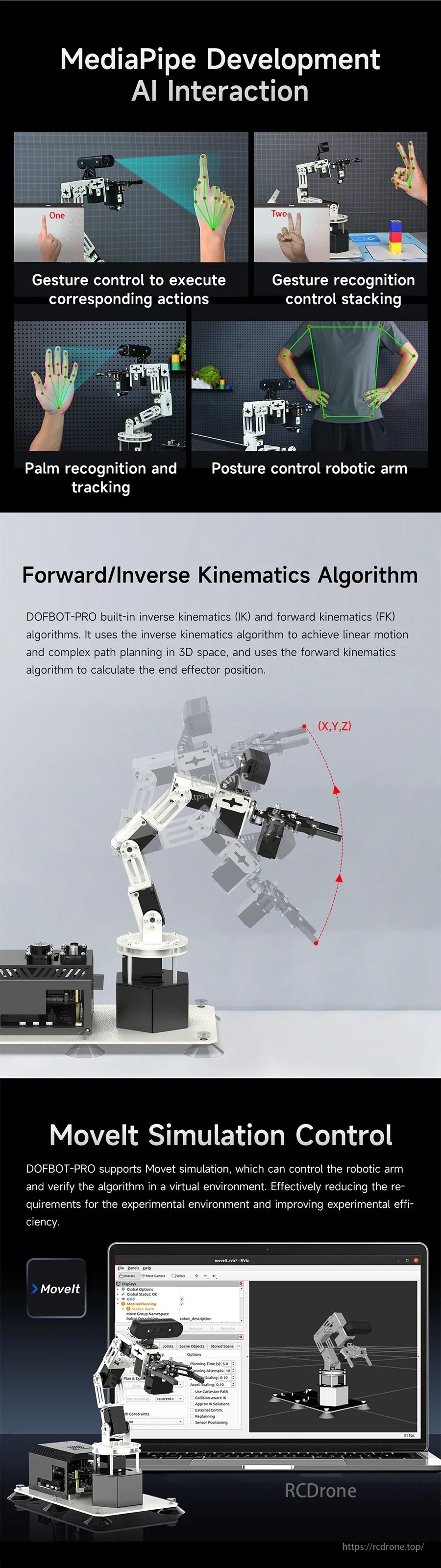
DOFBOT Pro 支援基於 MediaPipe 的手勢互動、正/逆運動學以及 MoveIt 模擬控制,用於設置和開發工作流程。
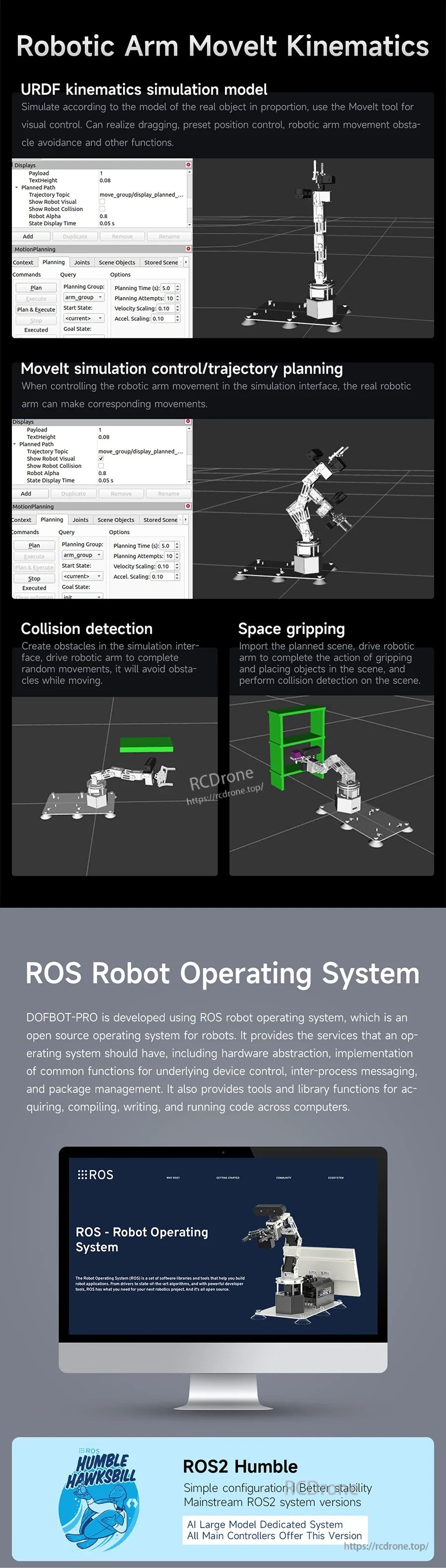
DOFBOT Pro 支援 MoveIt 運動學模擬,具有軌跡規劃、碰撞檢測和 ROS/ROS2 (Humble) 工作流程,用於運動控制。

DOFBOT Pro 支援應用程式控制、網頁控制和 USB 無線遙控,具有標記為 J1–J6 的 6-DOF 關節佈局,用於精確設置和運動規劃。

DOFBOT Pro 6-DOF 機械臂將基於 Jetson 的控制板與 DaBai DCW2 深度攝像頭和智能串行總線伺服器配對,用於視覺引導的運動項目。
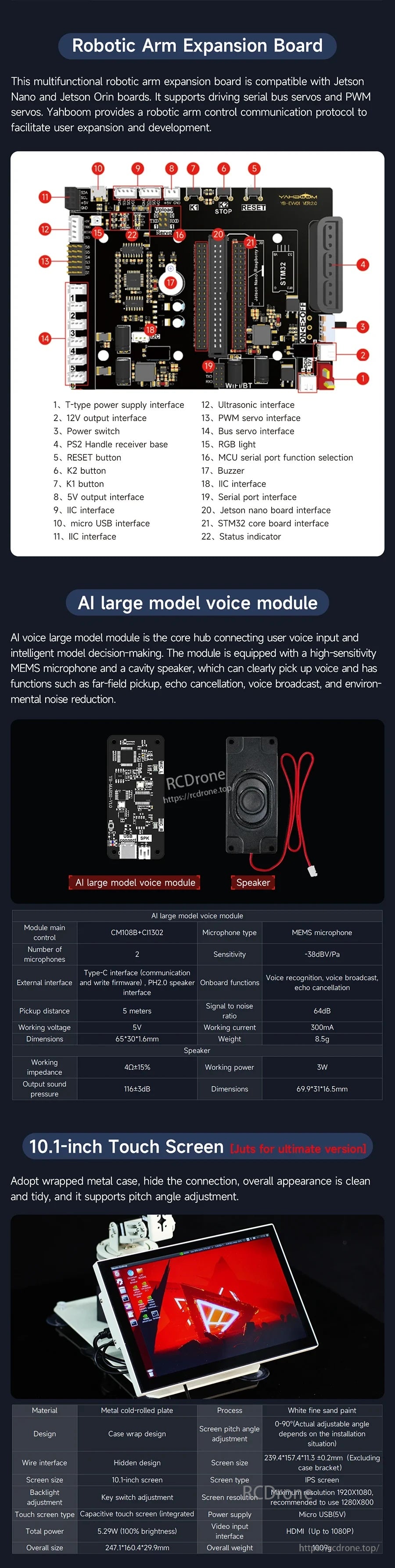
DOFBOT Pro 設置包括機械臂擴展板佈局,並支援語音模組和 10.1 英寸觸控螢幕等附加裝置,用於控制。
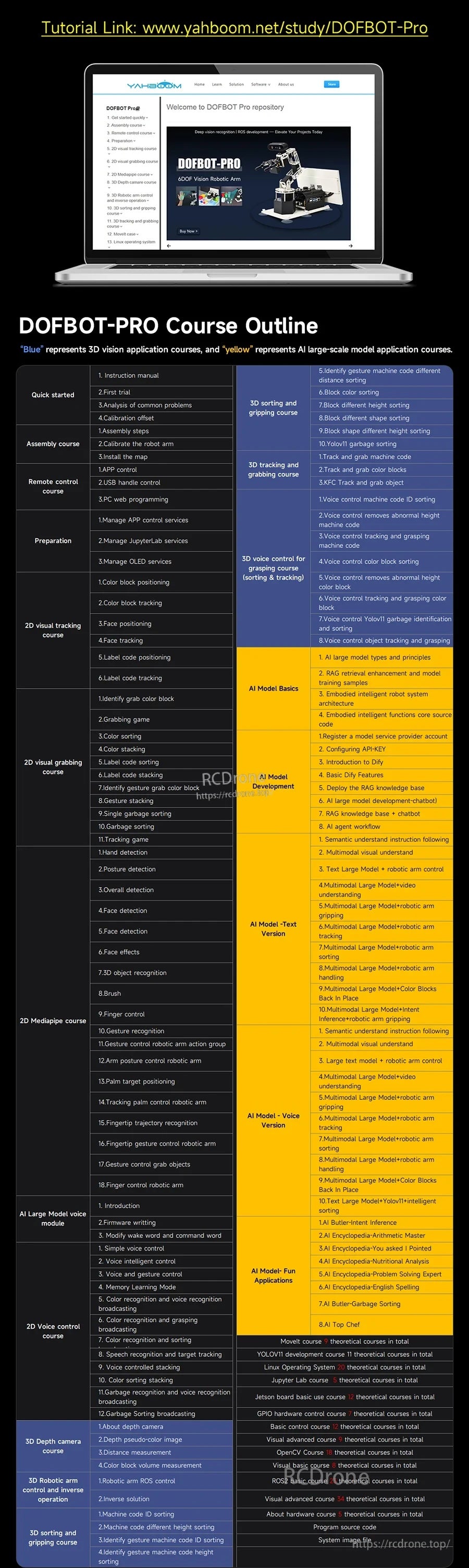
DOFBOT-PRO 課程大綱分解了培訓模塊和學習目標,以幫助計劃設置和開發步驟。
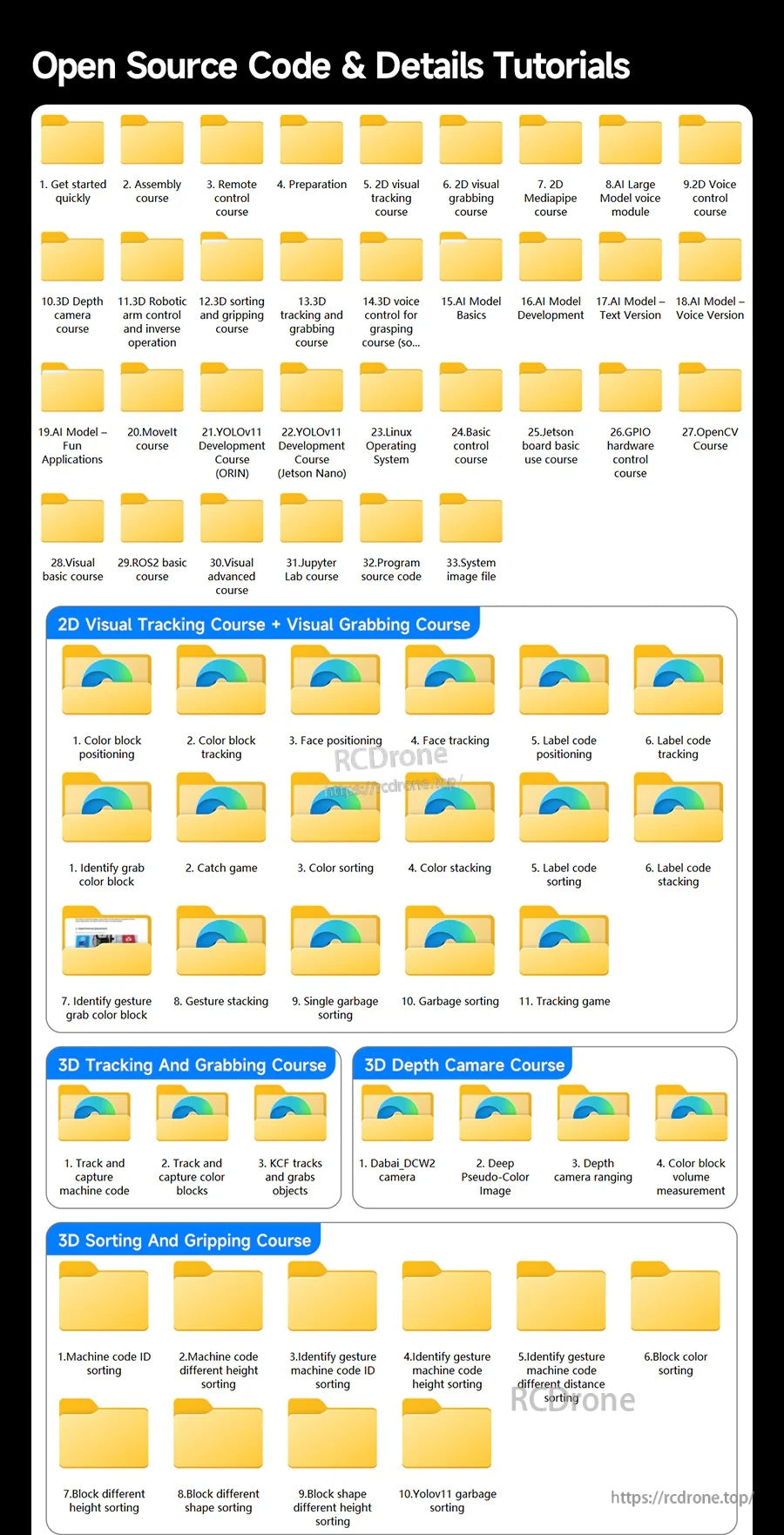
DOFBOT Pro 包括組織良好的開源代碼和逐步教程文件夾,涵蓋2D/3D視覺跟踪、分類和抓取以及深度相機工作流程。
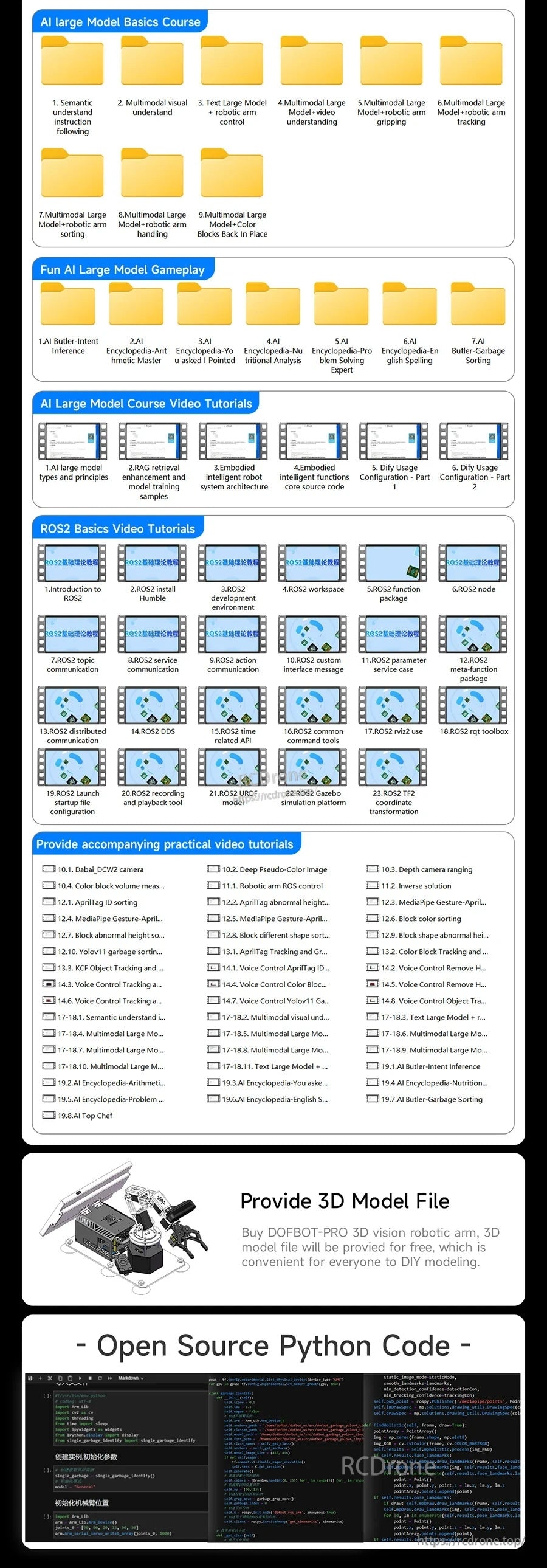
DOFBOT Pro 包括可下載的視頻教程、ROS2學習材料、3D模型文件和用於Jetson板開發的開源Python代碼。

尺寸圖和規格概述幫助您規劃DOFBOT Pro 6-DOF機械臂的安裝空間和系統集成。
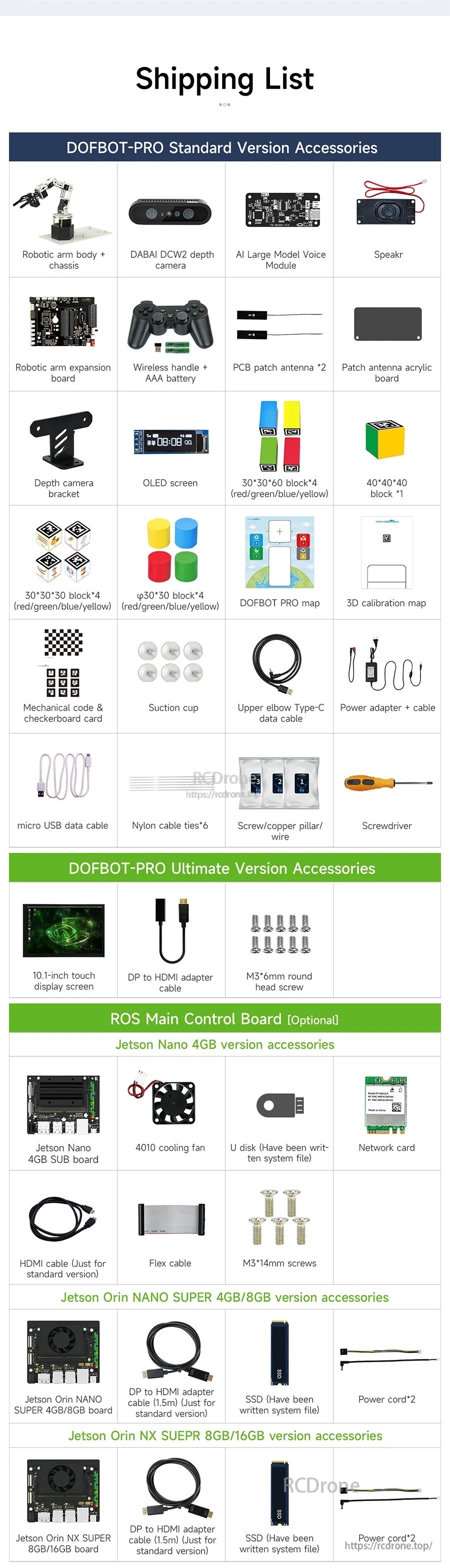
DOFBOT Pro 套件包括機械臂及一套標準配件,如控制器硬件、電源和數據線以及基本的組裝和設置工具。
Related Collections











































- 選擇項目後,整個頁面將重新整理。
- 在新視窗中開啟。