Yahboom IMU 感測器模組 6/9/10 軸 AHRS,支援 ROS1/ROS2,IIC/UART,Type-C,適用於 Jetson/Raspberry Pi
Yahboom IMU 感測器模組 6/9/10 軸 AHRS,支援 ROS1/ROS2,IIC/UART,Type-C,適用於 Jetson/Raspberry Pi
Yahboom
無法載入取貨服務供應情況
概述
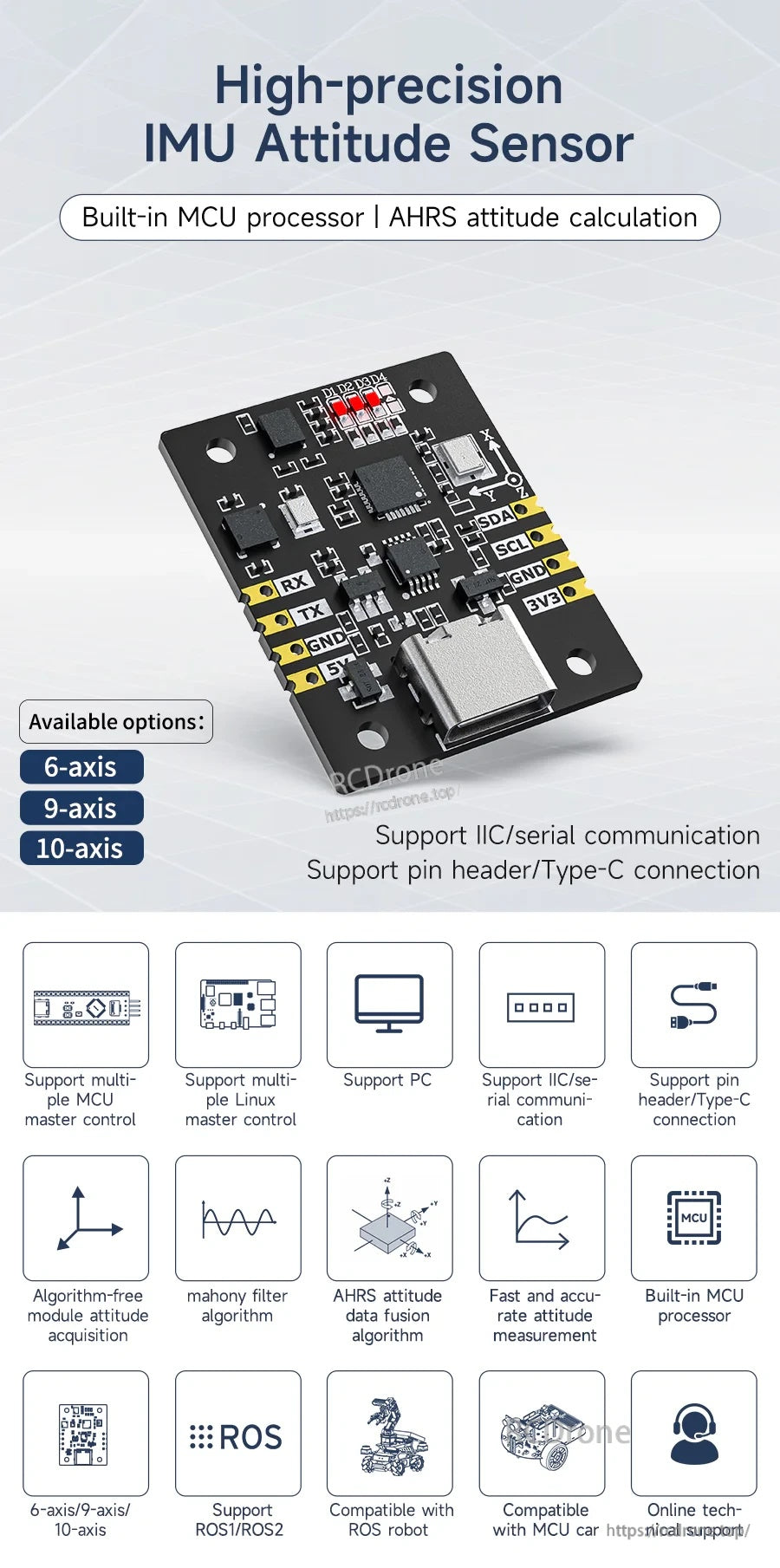
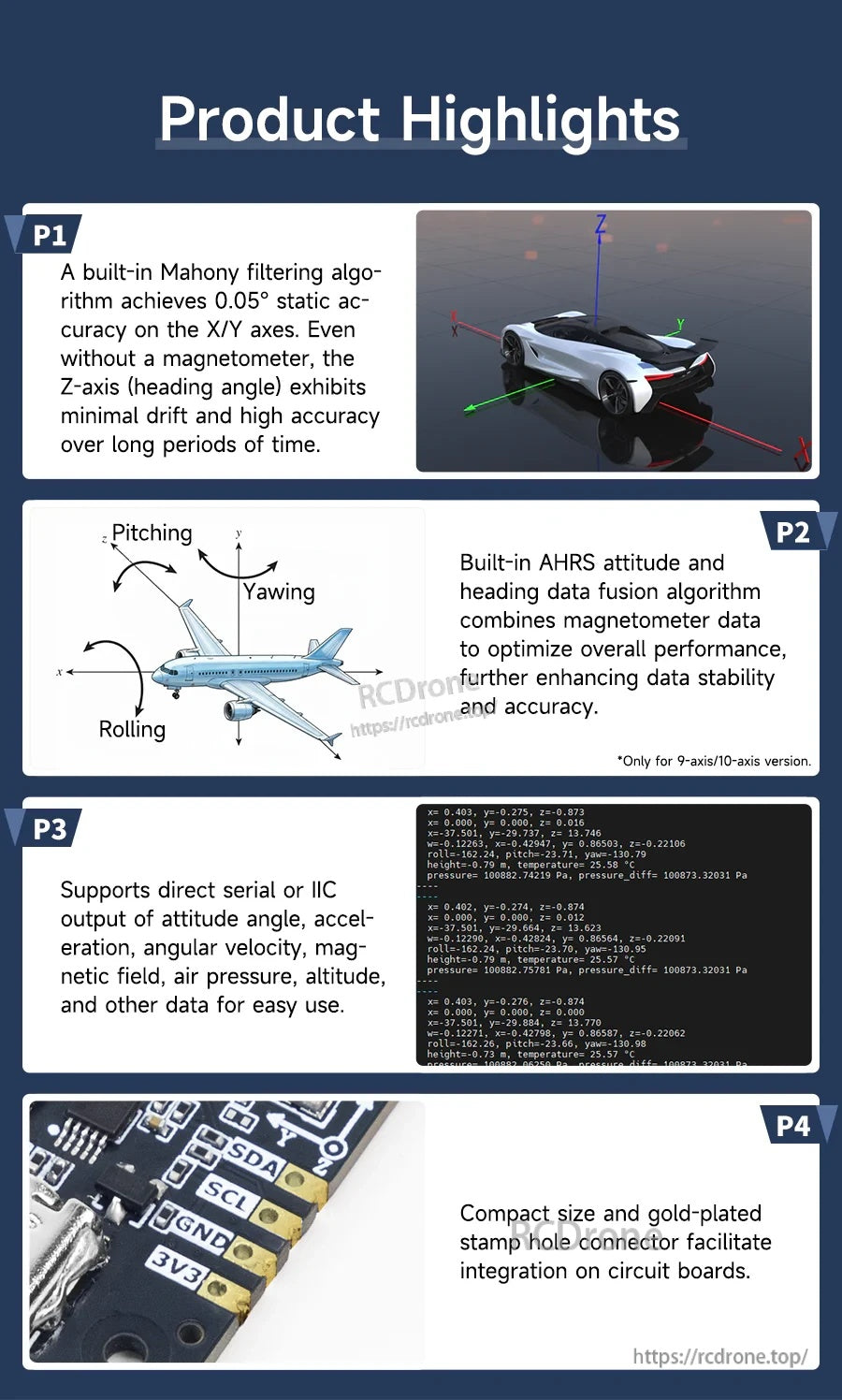
Yahboom IMU 感測器模組(6軸 / 9軸 / 10軸)整合多軸 MEMS 感測器,內建高性能 32 位元 72MHz 處理器,用於實時 AHRS 姿態計算和動態補償。通過融合陀螺儀、加速度計、磁力計(9/10 軸)和氣壓計(10 軸)數據,模組輸出運動/姿態數據,包括滾轉、俯仰和偏航,適用於機器人、無人機、智慧農業和導航應用。支持 IIC (I2C) 和 UART (串行) 通訊,Type-C 和針腳連接,寬範圍 3.3V/5V 輸入電壓。
主要特點
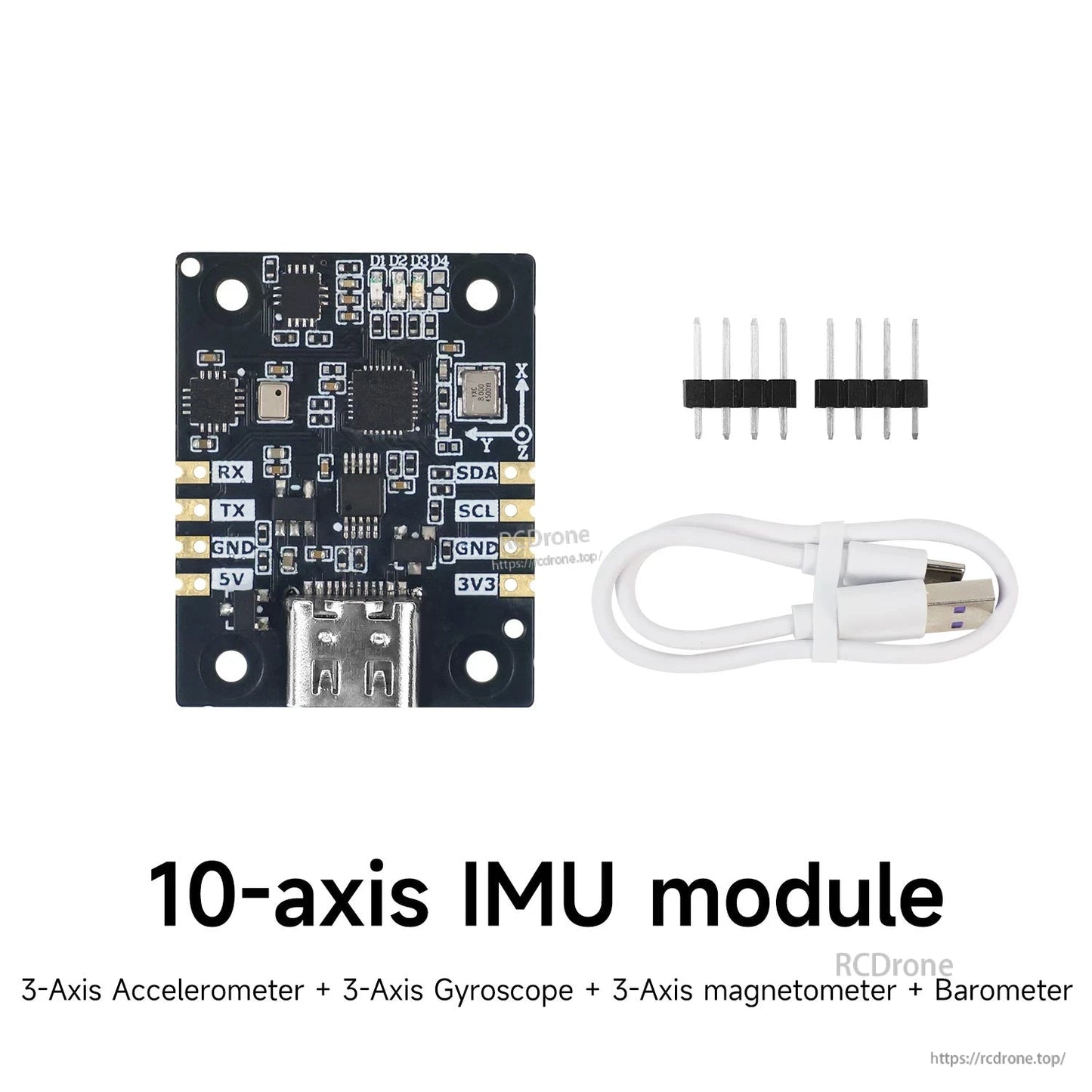
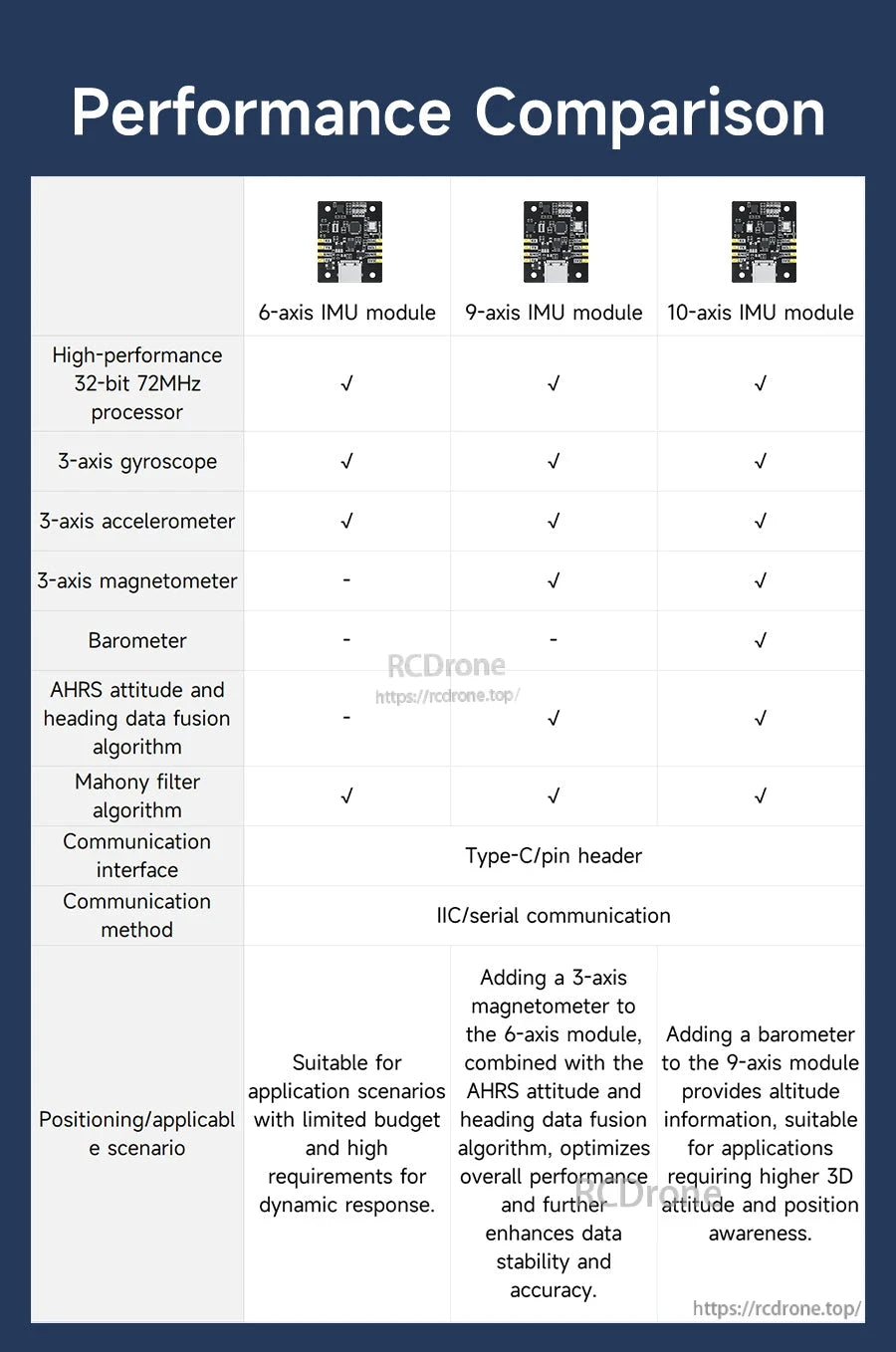
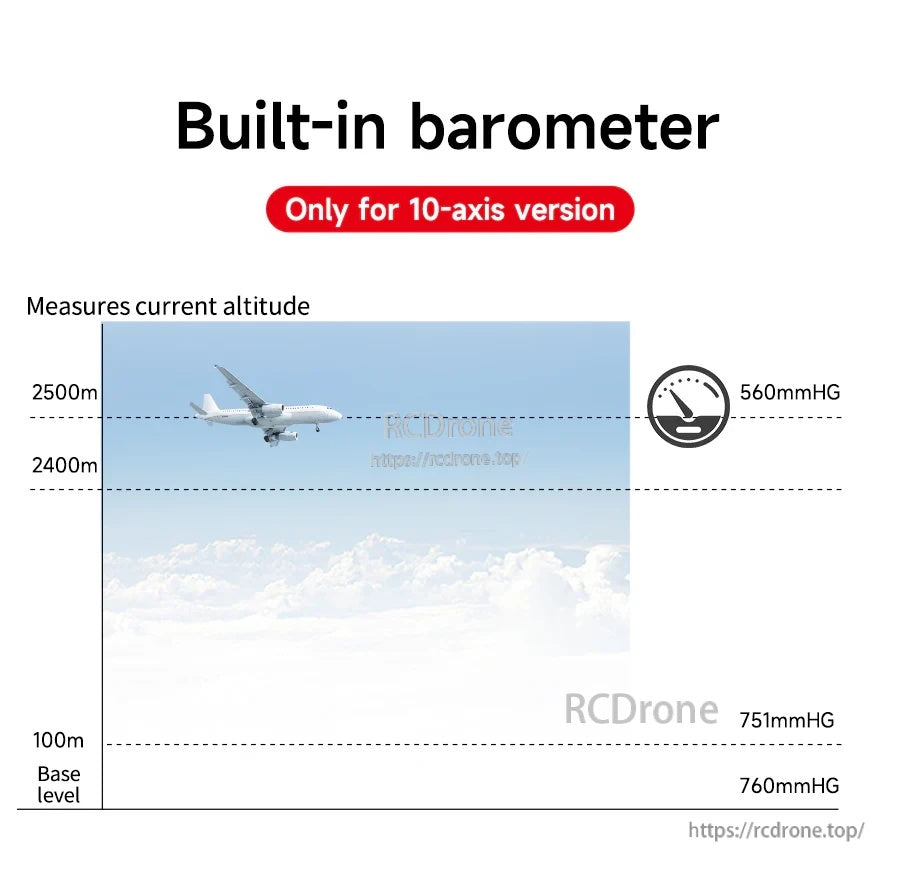
- 三種軸數選項: 6軸(3軸陀螺儀 + 3軸加速度計)、9軸(+ 3軸磁力計)、10軸(+ 氣壓計,用於高度相關數據)。
- 多重輸出: 歐拉角、四元數、三軸角速度、三軸加速度;三軸磁力計數據(9/10軸);氣壓/高度和溫度(10軸)。
- 內建算法: Mahony濾波算法;AHRS姿態和航向數據融合算法(如指定的9/10軸模型);某些型號列出DMP姿態融合算法。
- 介面: IIC/串行通信;Type-C和針腳連接(如指定的型號)。
- ROS生態系統支持: 選定型號支持ROS1/ROS2,包括RViz可視化用例。
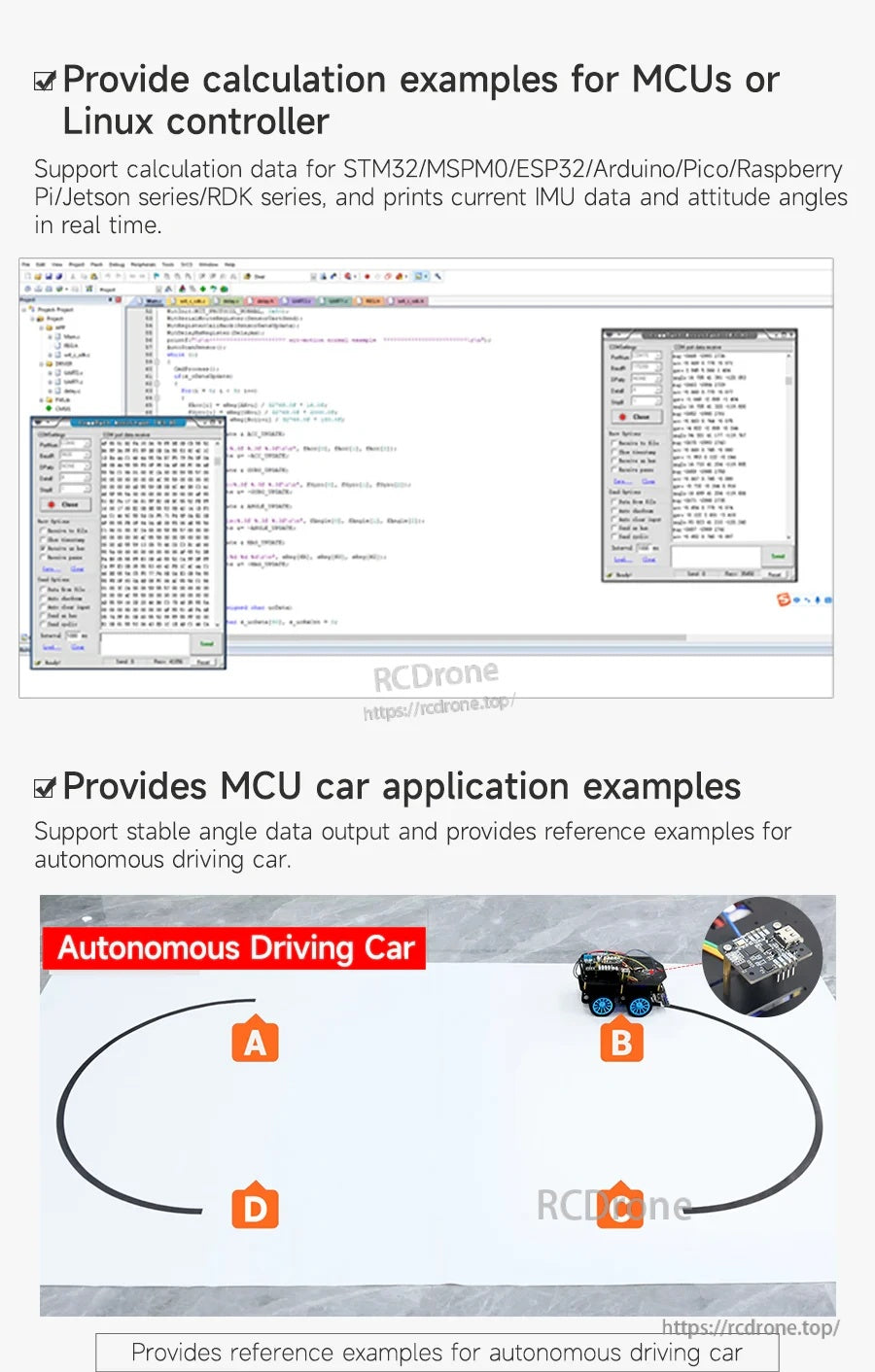
- 提到的示例平台: Arduino、Raspberry Pi、STM32、ESP32、Jetson、RDK、MSPM0、PC。
規格
| 版本 / 模組 | 傳感器 | 數據輸出 | 通信介面 | IIC 通信速度 | 串行通信速度 | 內建算法 | ROS 生態支持 | 外部擴展 | 尺寸 | 重量 |
|---|---|---|---|---|---|---|---|---|---|---|
| MPU-6050 六軸傳感器 | 三軸陀螺儀 + 三軸加速度計 | 加速度、角速度、角度、四元數 | IIC 介面(針頭) | 最大 400KHz | / | DMP 姿態融合算法 | / | 可連接外部磁力計模組 | 21mm x 16mm | 1.6g |
| 高精度6軸姿態傳感器 | 3軸陀螺儀 + 3軸加速度計 | 加速度、角速度、角度、四元數 | IIC接口(針腳)+ 串口接口(針腳)+ Type-C | 最大100KHz | 115200bps | Mahony過濾算法 | 支持ROS1/ROS2 | / | 24.5mm x 31mm | 3.9g |
| 高精度9軸姿態傳感器 | 3軸陀螺儀 + 3軸加速度計 + 3軸磁力計 | 加速度、角速度、角度、四元數、磁場 | IIC接口(針腳)+ 串口接口(針腳)+ Type-C | 最大100KHz | 115200bps | Mahony過濾算法 + AHRS姿態數據融合算法 | 支持ROS1/ROS2 | / | 24.5mm x 31mm | 3.9g |
| 高精度10軸姿態傳感器 | 3軸陀螺儀 + 3軸加速度計 + 3軸磁力計 + 氣壓計 | 加速度、角速度、角度、磁場、氣壓、高度、溫度、四元數 | IIC接口(針腳)+ 串口接口(針腳)+ Type-C | 最大100KHz | 115200bps | Mahony濾波算法 + AHRS姿態數據融合算法 | 支持ROS1/ROS2 | / | 24.5mm x 31mm | 3.9g |
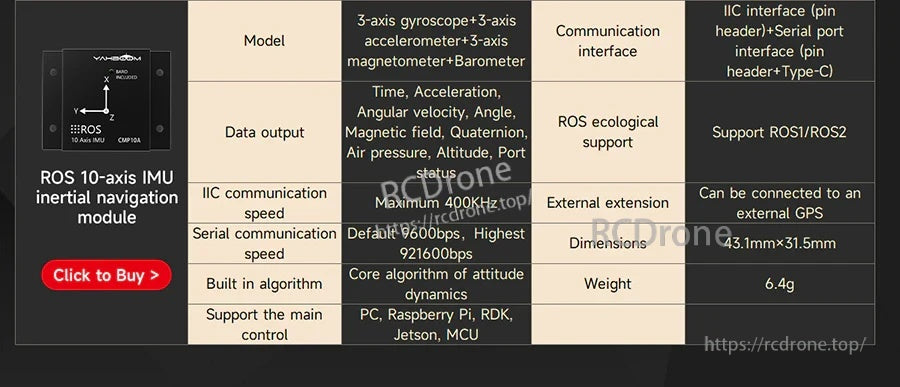
| ROS 10軸IMU慣性導航模組 | 3軸陀螺儀 + 3軸加速度計 + 3軸磁力計 + 氣壓計 | 時間、加速度、角速度、角度、磁場、四元數、氣壓、高度、端口狀態 | IIC介面(針腳)+ 串口介面(針腳)+ Type-C | 最大400KHz | 默認9600bps,最高921600bps | 姿態動力學核心算法 | 支持ROS1/ROS2 | 可連接外部GPS | 43.1mm x 31.5mm | 6.4g |
附加說明:數據更新率高達100Hz(適用於高精度IMU姿態傳感器系列)。
應用
- 機器人平衡、導航和姿態穩定
- 無人機飛行控制和運動跟踪
- ROS1/ROS2 在 RViz 中的可視化和 IMU 數據顯示
- MCU 或 Linux 控制器計算示例 (STM32/MSPM0/ESP32/Arduino/Pico/Raspberry Pi/Jetson 系列/RDK 系列)
如有集成或兼容性問題(接口、ROS 使用或平台選擇),請聯繫 [email protected] or 訪問 https://rcdrone.top/ .
手冊
詳情

為機器人項目、無人機和以導航為重點的平台提供穩定的姿態和運動反饋。

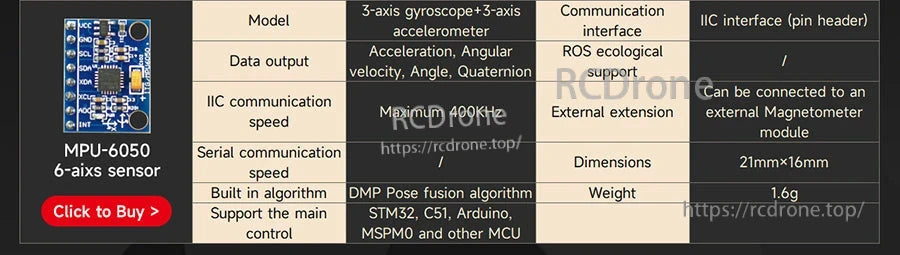
當您需要一個緊湊的 I2C IMU 來獲取加速度、角速度和角度/四元數輸出時,選擇 MPU-6050 六軸選項。
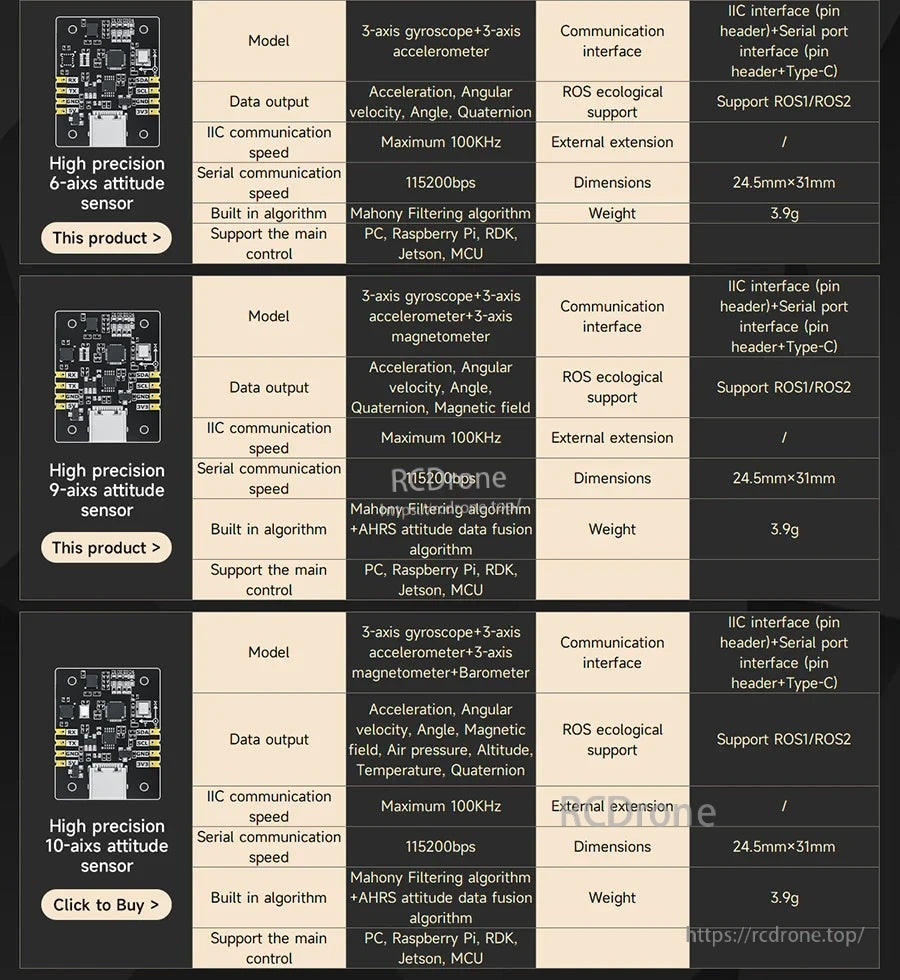
三個版本讓您輕鬆匹配您的項目:6軸用於核心運動,9軸用於航向,10軸用於高度感知導航。
內建MCU支持實時AHRS姿態計算,並具有靈活的I2C或UART接線和Type-C連接。
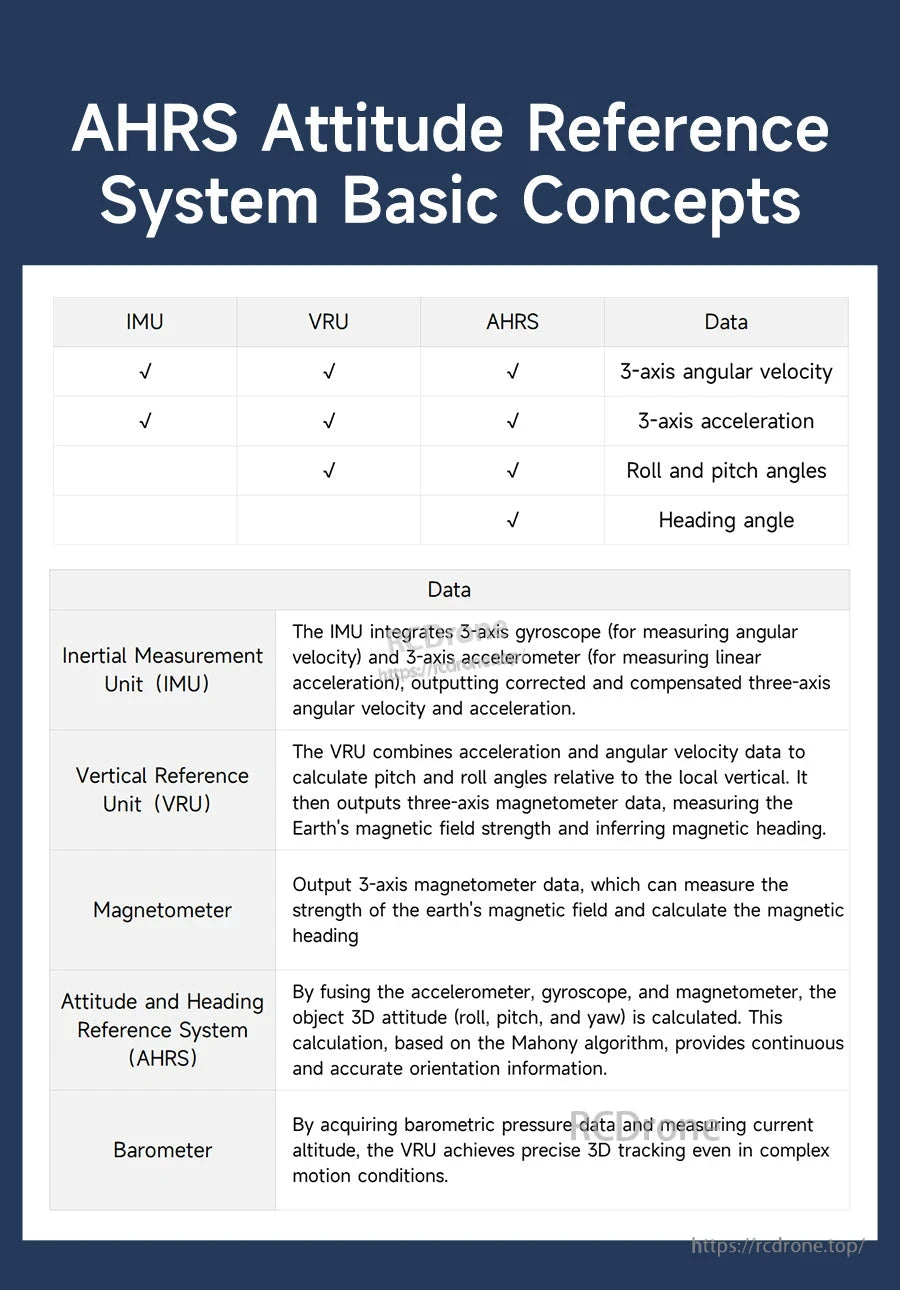
IMU、VRU和AHRS概念闡明了您可以預期的數據——角速度、加速度、滾轉/俯仰和航向。
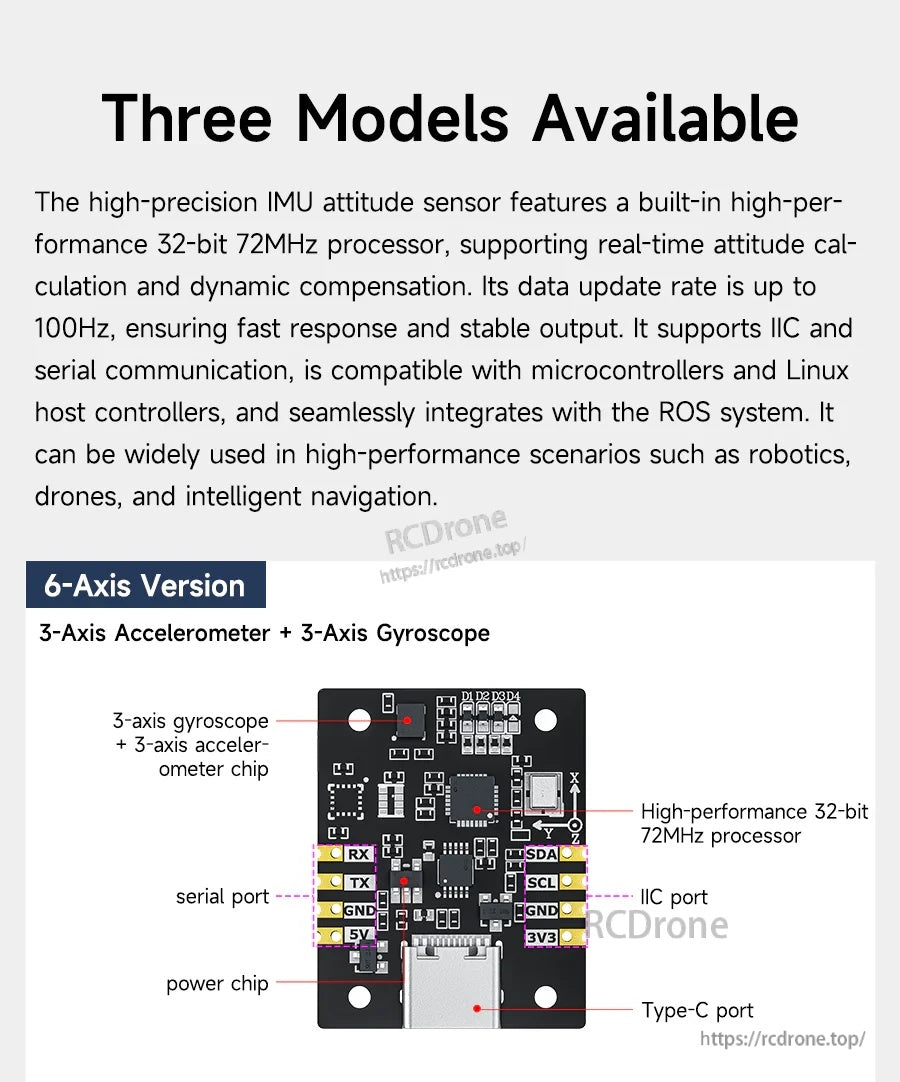
6軸版本集成了陀螺儀+加速度計,並提供對UART、I2C和USB-C電源/連接點的清晰訪問。
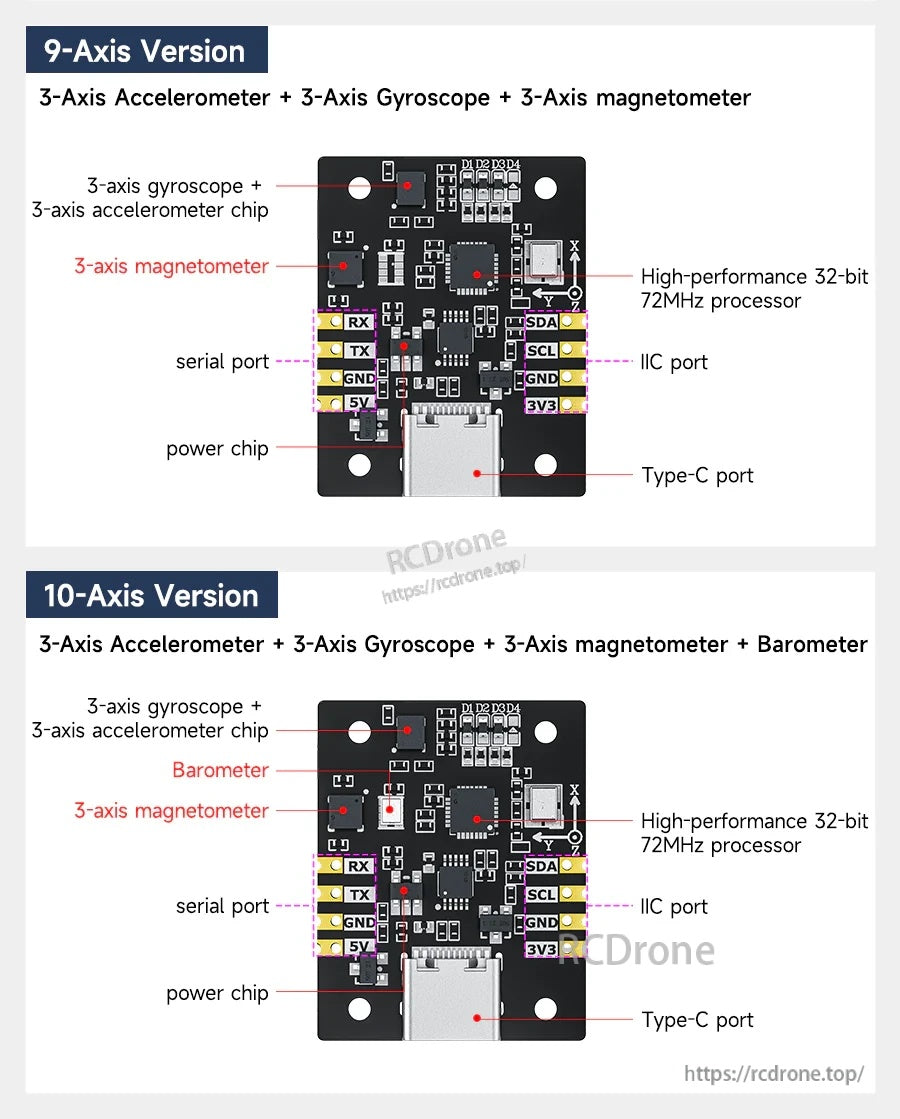
選擇9軸型號以獲得基於磁力計的航向,或選擇10軸型號以添加氣壓計數據以用於與高度相關的應用。
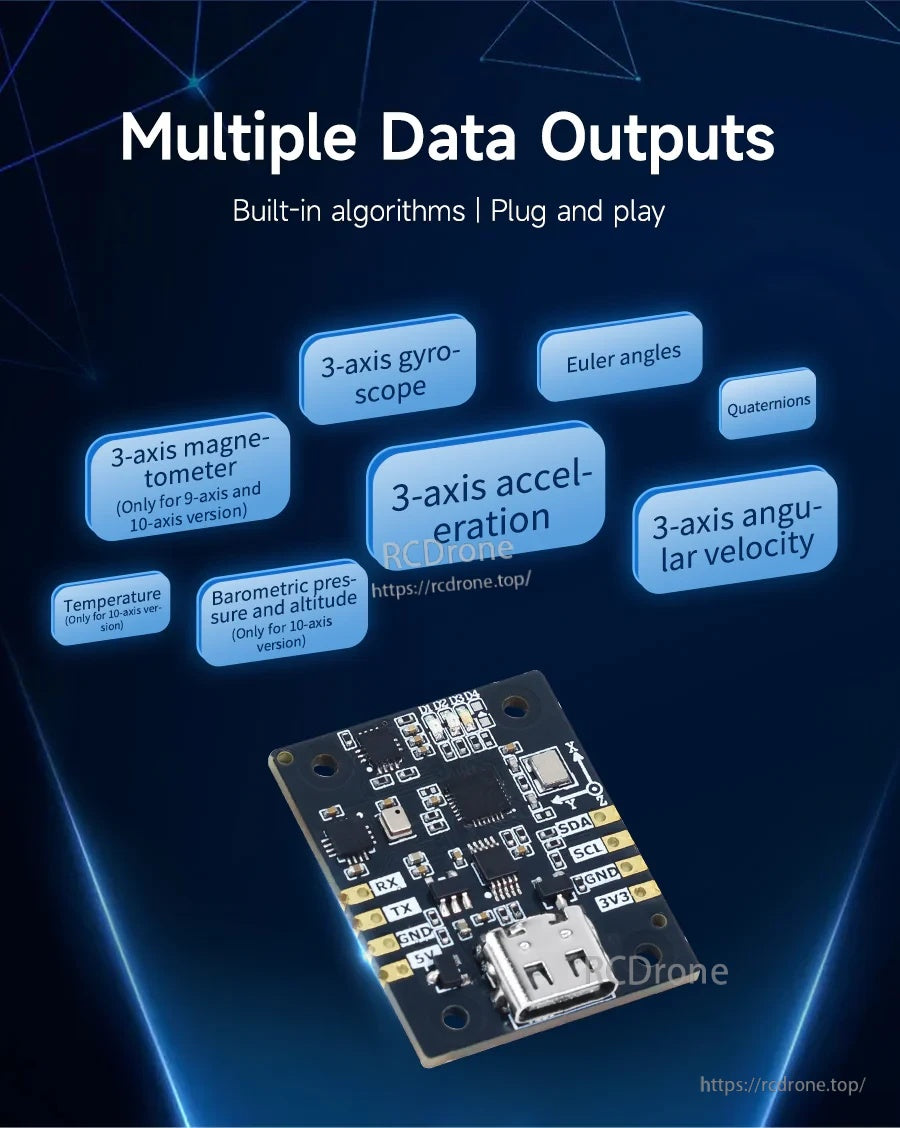
輸出選項包括歐拉角、四元數、3軸加速度和3軸角速度,並在更高軸版本中添加磁力計/氣壓計數據。
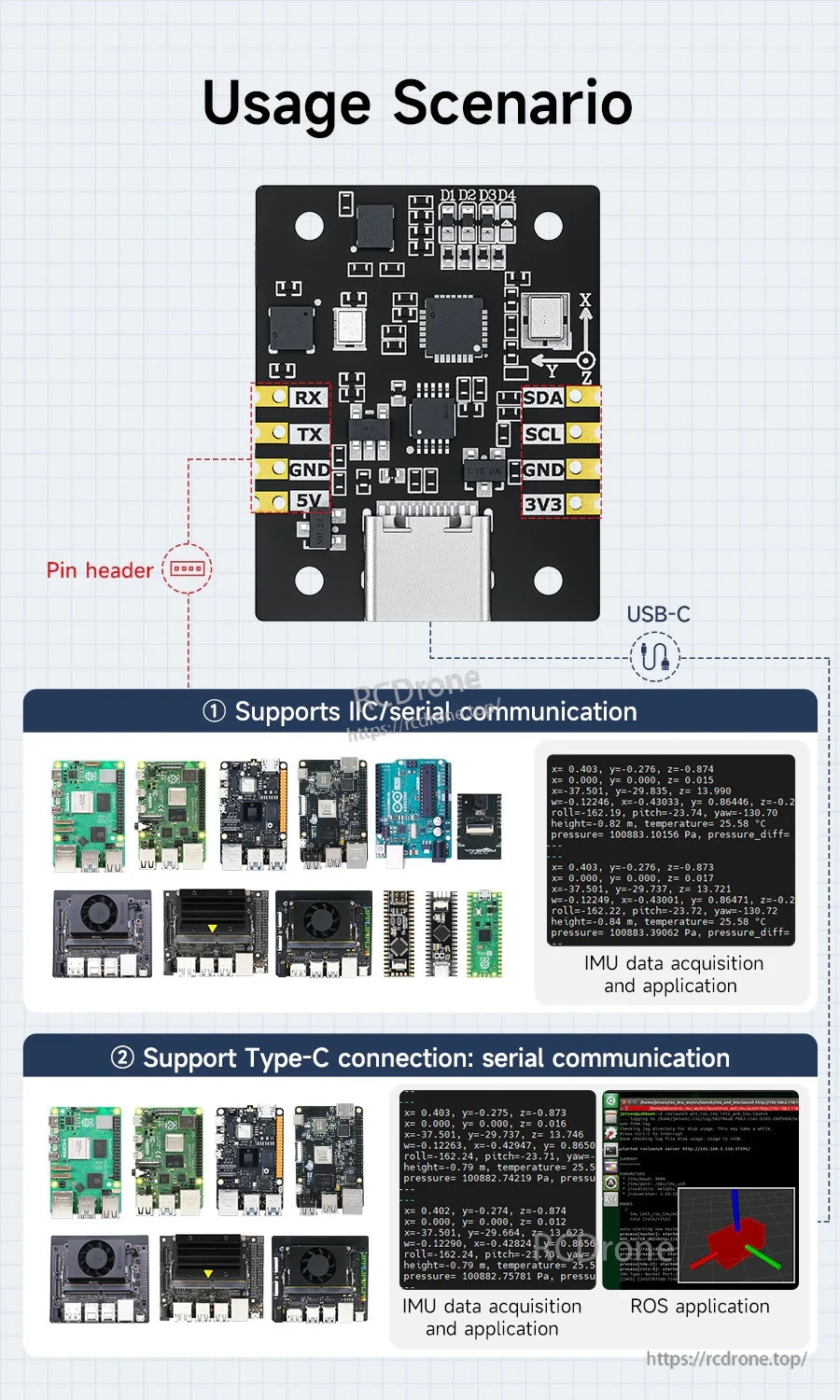
通過引腳頭或USB‑C進行整合,然後將IMU數據流傳輸到微控制器、Linux主機或ROS工具進行開發和測試。
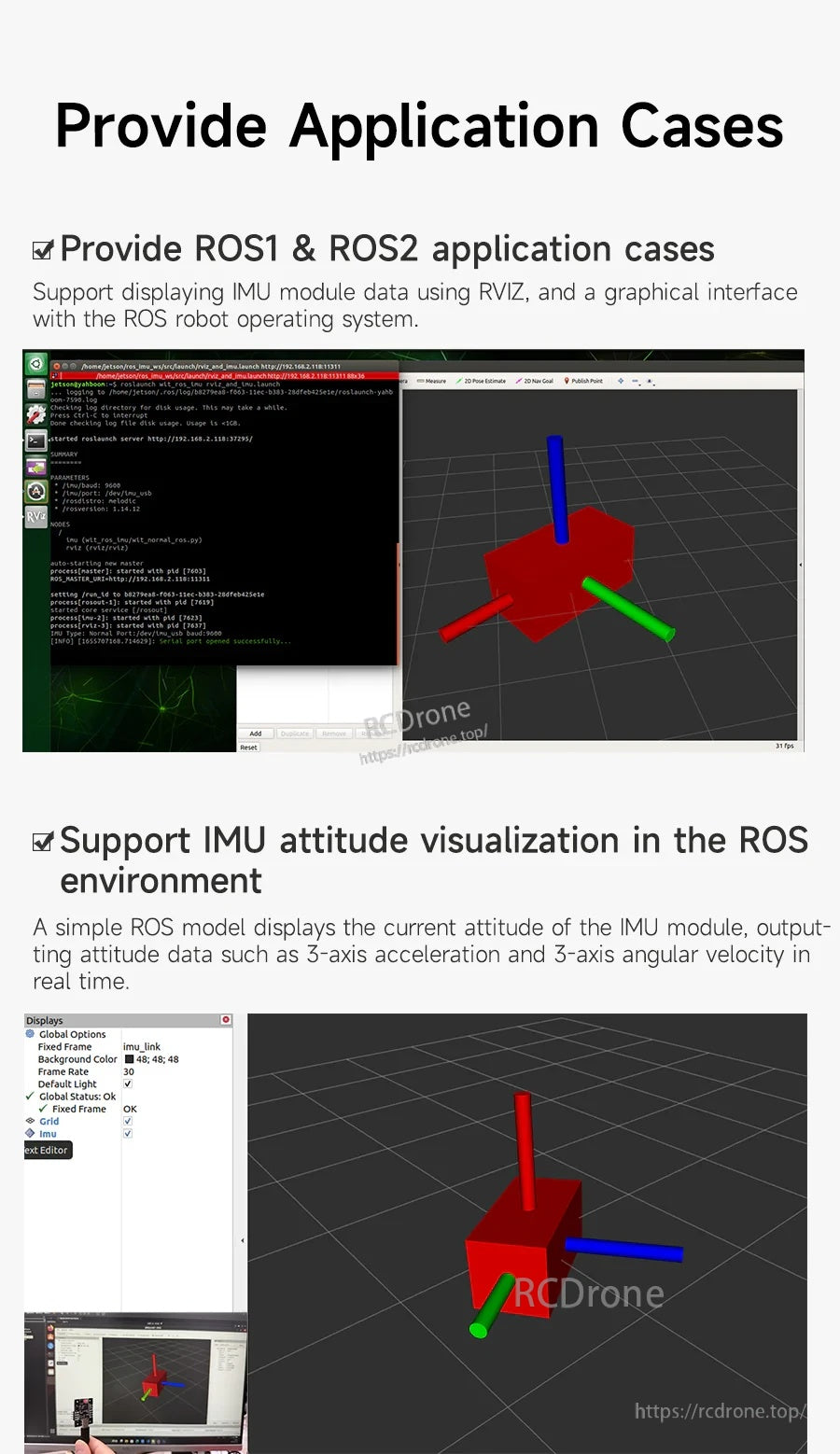
ROS1/ROS2範例支持在啟動和整合期間使用RViz可視化IMU姿態數據。
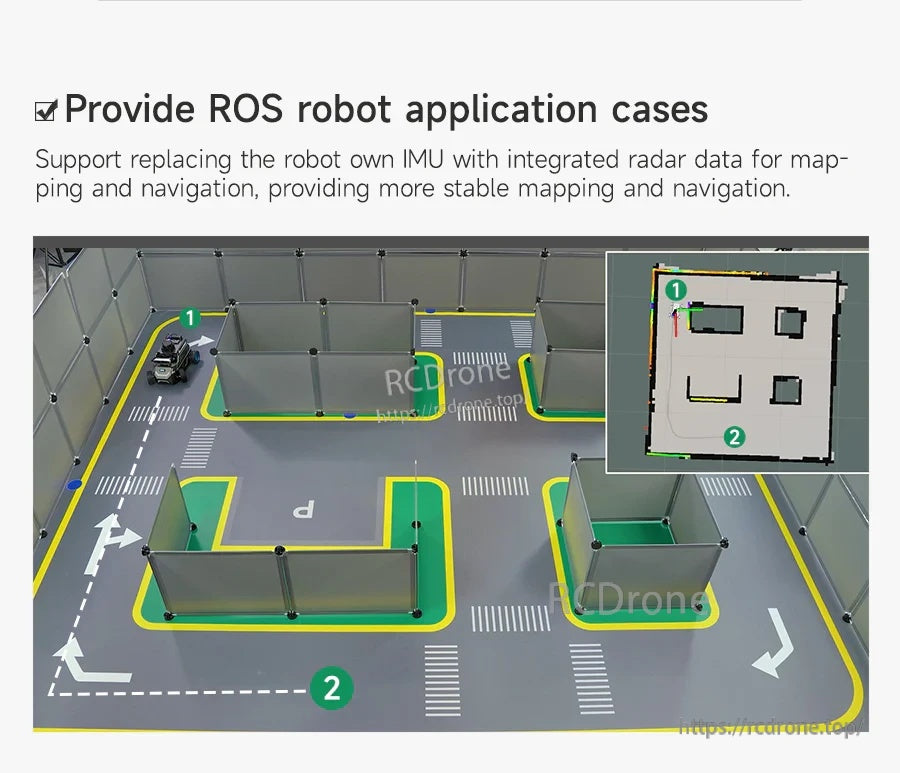
對於移動機器人,IMU融合可以提高典型室內路線佈局中的映射和導航穩定性。

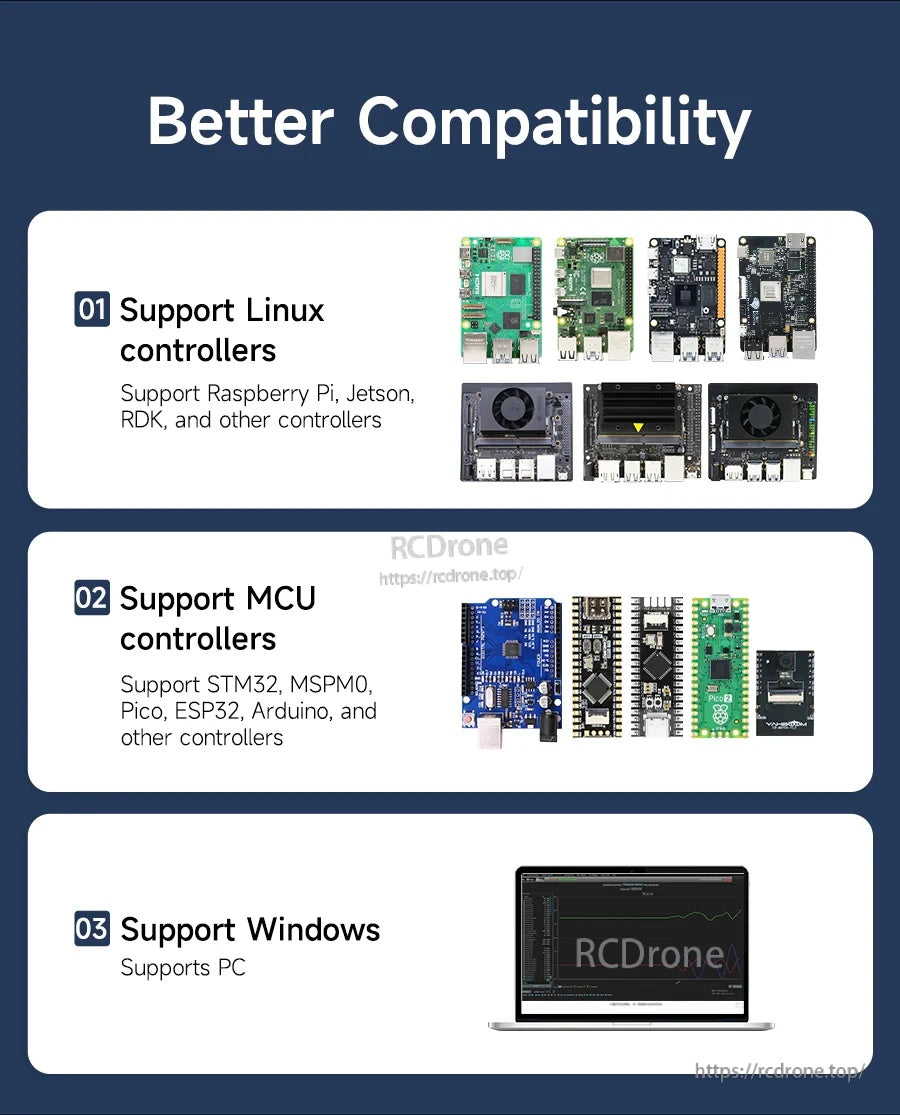
廣泛的控制器支持幫助您在Raspberry Pi/Jetson級Linux主機、常見MCU或Windows PC上快速原型設計。

Yahboom IMU傳感器模塊提供ROS1和ROS2兼容性,適用於機器人開發工作流程。
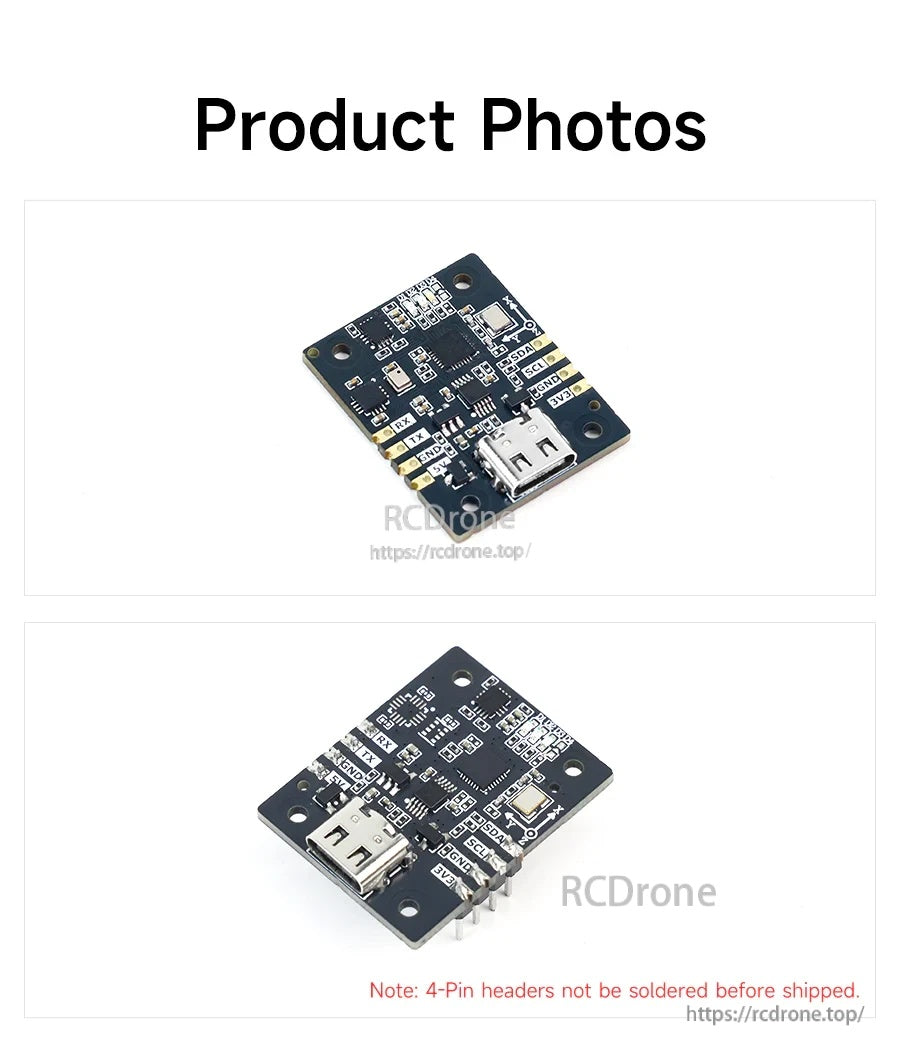
Yahboom IMU傳感器支持AHRS姿態和航向輸出,並使用SDA/SCL I2C焊盤,便於在電路板上進行簡單整合。
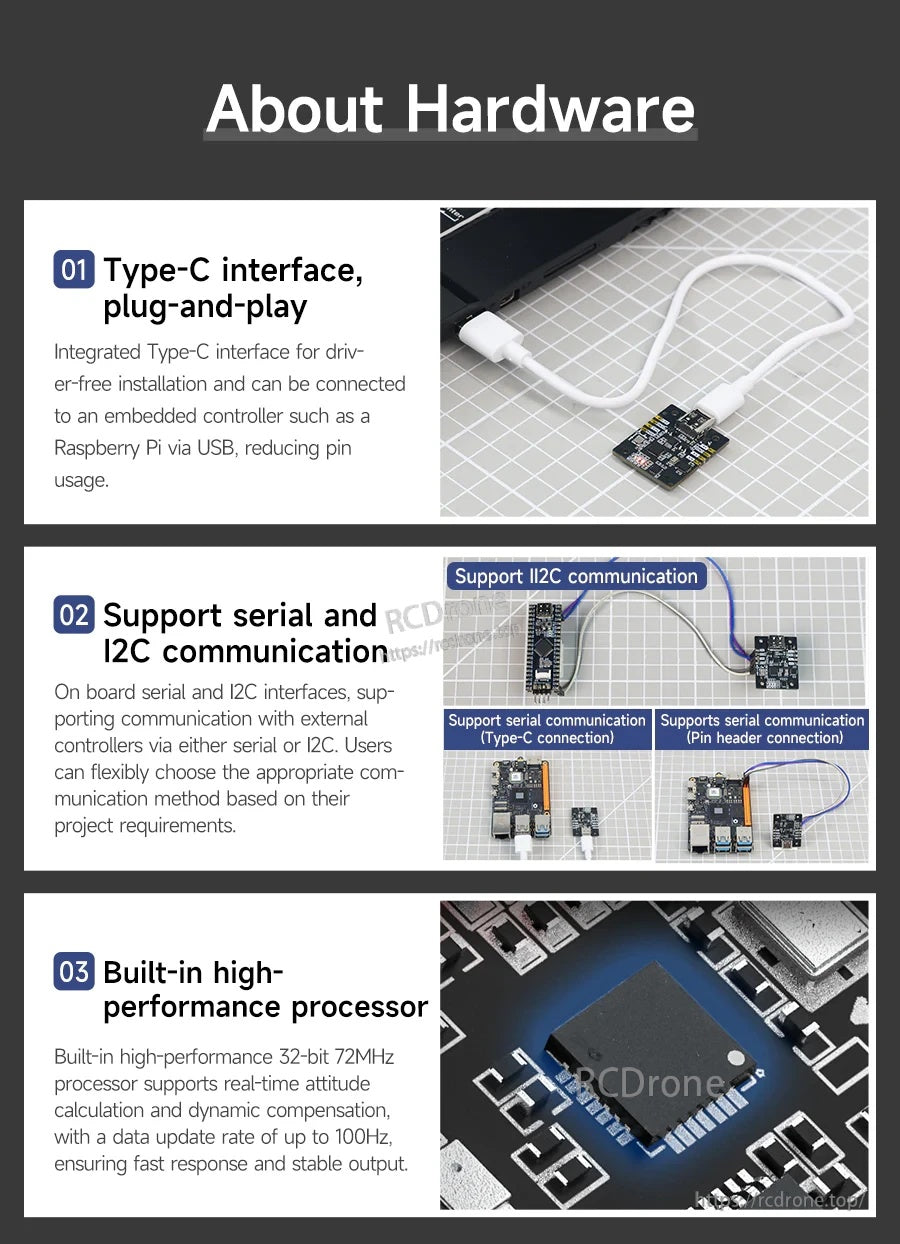
Yahboom IMU 感測器模組使用 USB-C 介面,支持 I2C 或串行連接,便於與控制器靈活集成。

Yahboom IMU 感測器模組包裝中包含針腳排針,但默認情況下未焊接,需自行焊接後使用。
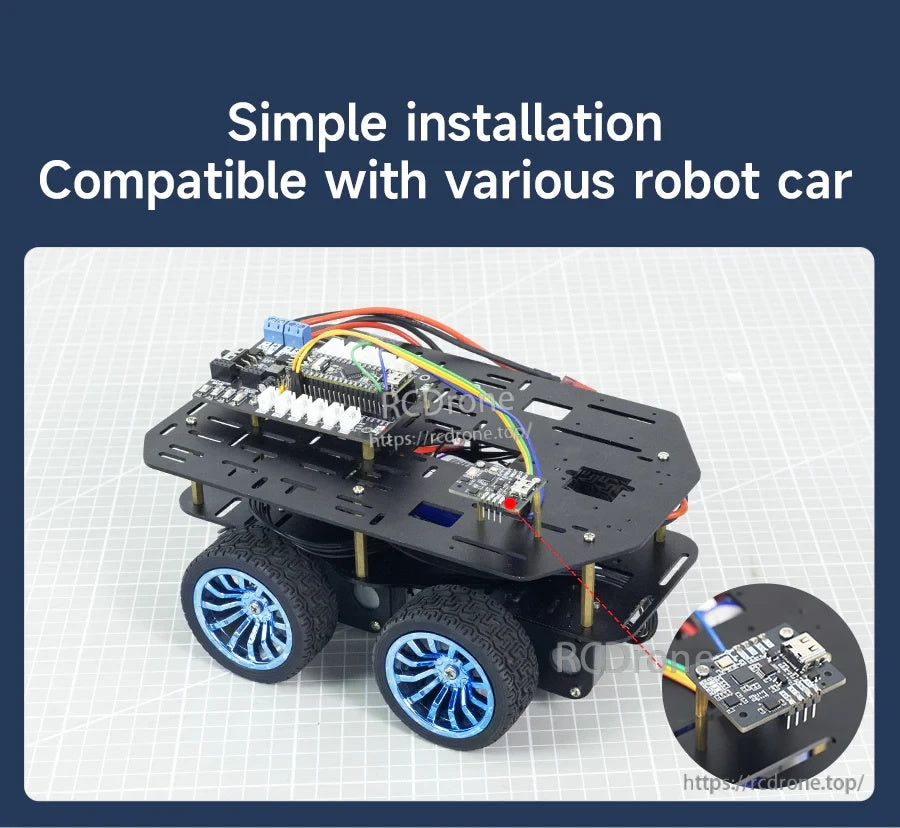
Yahboom IMU 感測器模組可整齊地安裝在常見的機器人車平台上,並簡單連接到主控板。
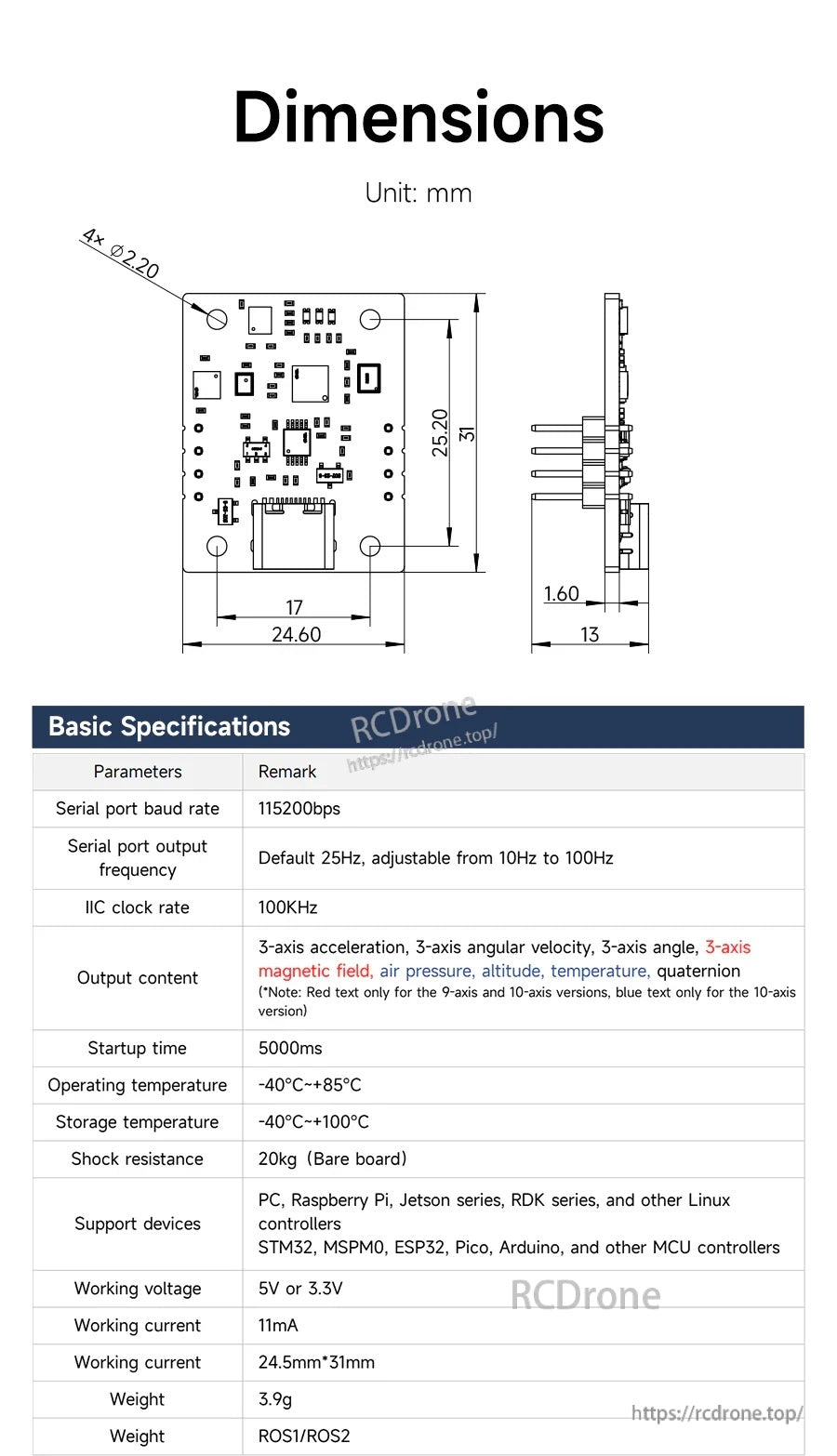
Yahboom IMU 感測器提供 UART (115200bps) 和 I2C (400kHz) 介面,運行於 3.3V,並包含緊湊的 24.6 mm 板尺寸。
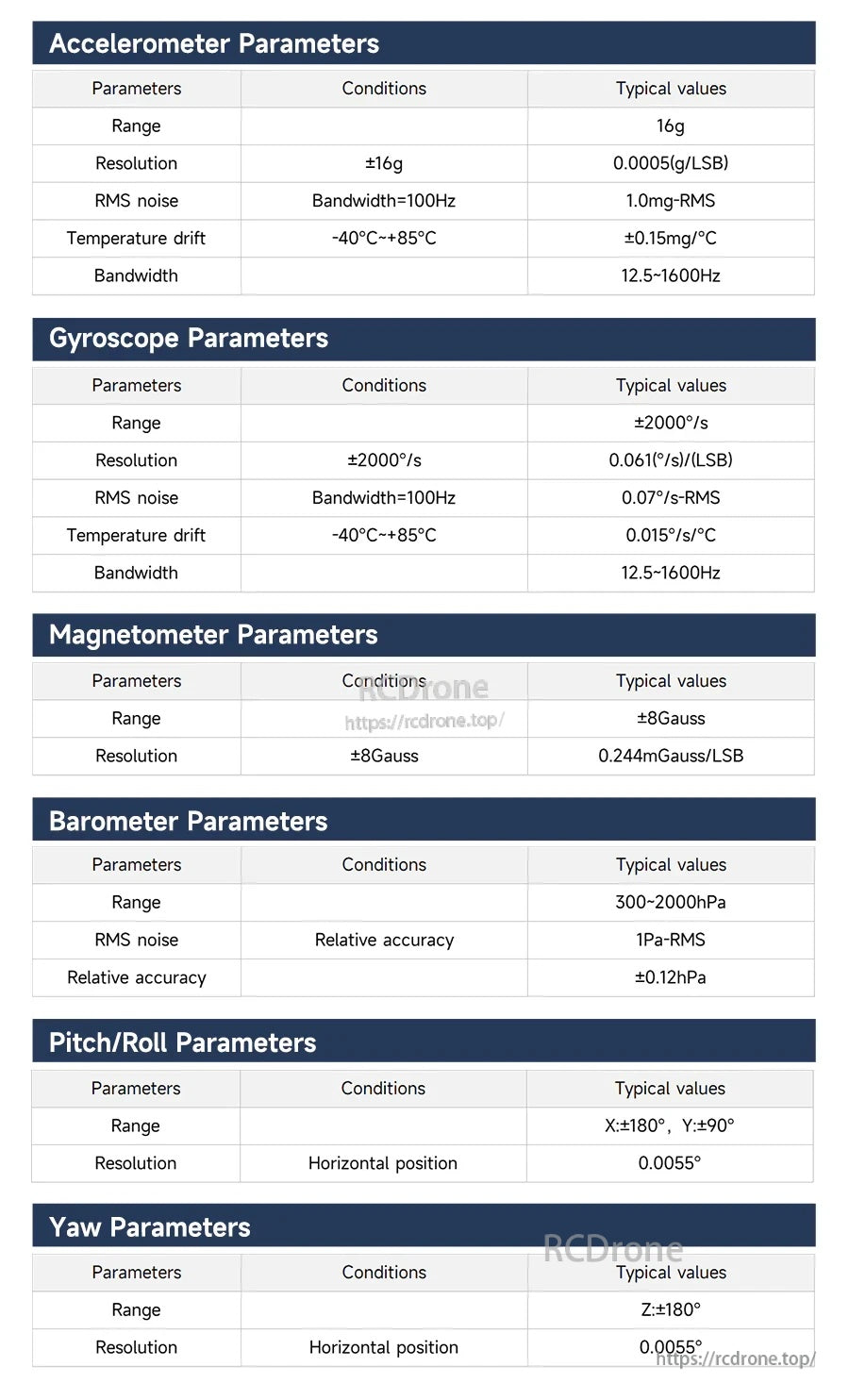
Yahboom IMU 感測器規格列出典型範圍,如 16g 加速度、±2000°/s 陀螺儀、±8 高斯磁力計和 300–2000 hPa 氣壓計。
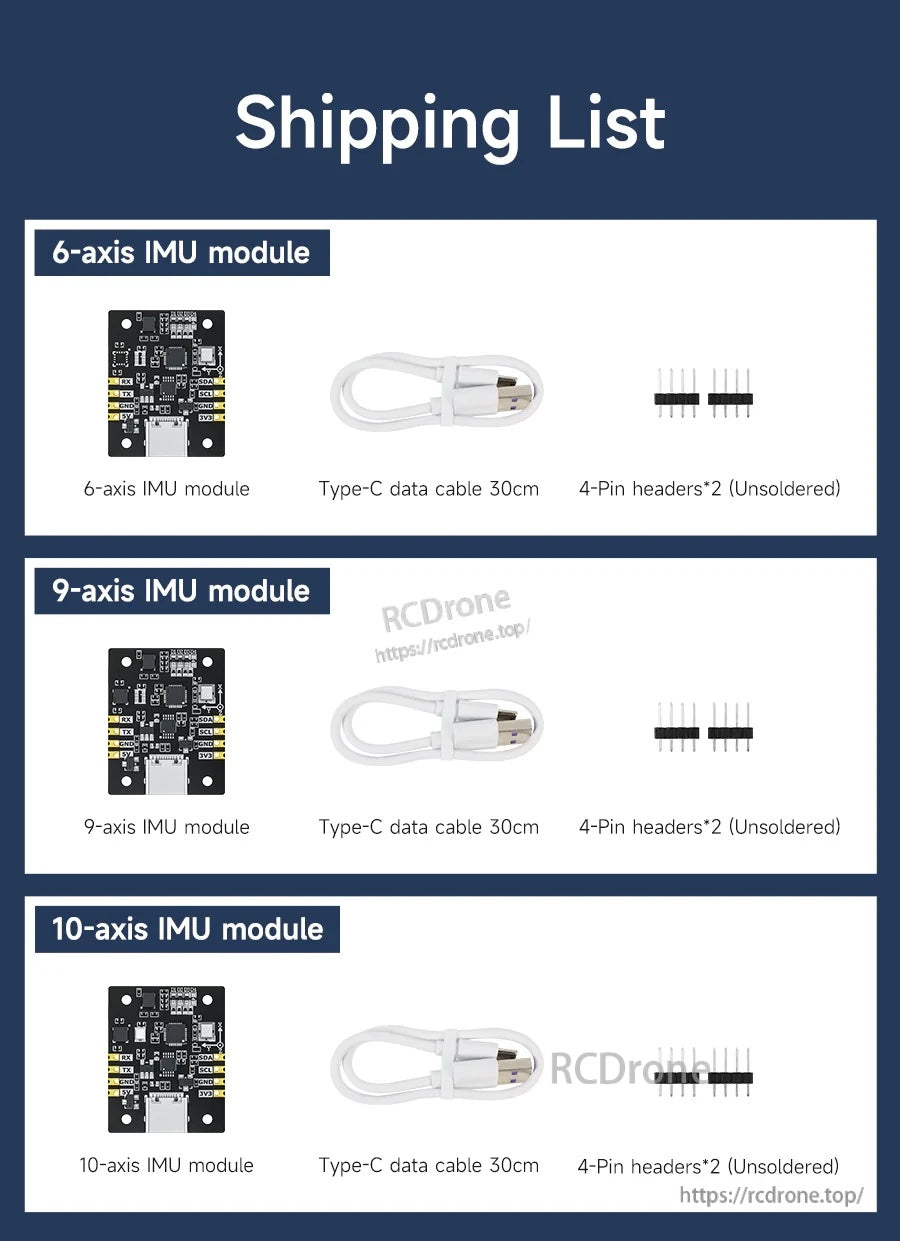
每個 IMU 模組套件包括感測器板、一條 30cm USB-C 數據線和兩個未焊接的 4 針排針以供接線。
Yahboom IMU 感測器模組使用緊湊的擴展板,配有 micro USB 連接器和接頭焊盤,便於接線到小型構建中。
Related Collections