





MD520 12V 520 直流齒輪馬達附編碼器,1:19/1:30/1:56,550/333/205RPM,適用於平衡車底盤
MD520 12V 520 直流齒輪馬達附編碼器,1:19/1:30/1:56,550/333/205RPM,適用於平衡車底盤
Yahboom
無法載入取貨服務供應情況
概述
這款520直流齒輪電機帶編碼器,專為平衡車和四輪手推車/智能車底盤設計。它使用高精度磁性(霍爾)編碼器進行速度測量和方向檢測,並配備碳刷和全金屬齒輪減速器,以提供可靠的驅動性能。
主要特點
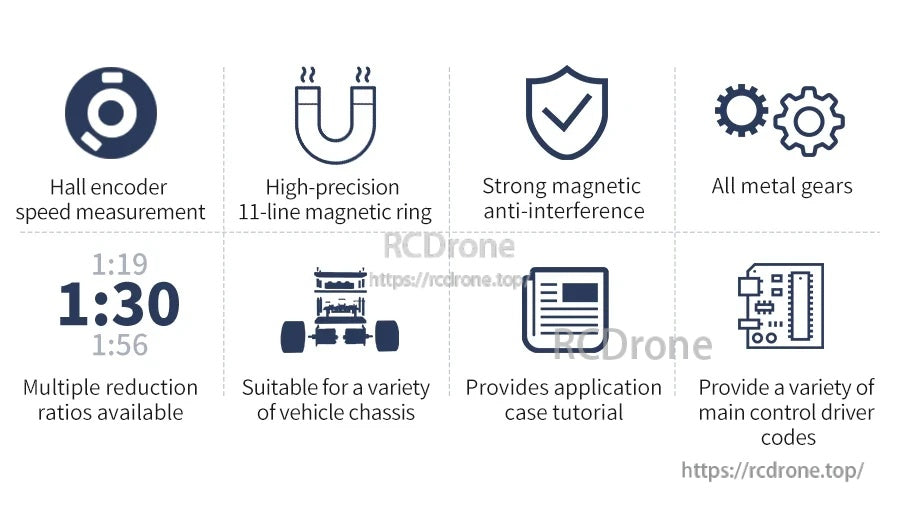
- AB相增量霍爾編碼器,用於速度測量和方向檢測
- 編碼器包含內建整形功能和上拉電阻;直接輸出方波供MCU I/O讀取
- 高精度11線磁環;強磁抗干擾
- 全金屬齒輪和碳刷電機結構
- 多種減速比可選:1:19 / 1:30 / 1:56
- 參考教程提到平衡車 / 麥克納姆輪 / 阿克曼車應用
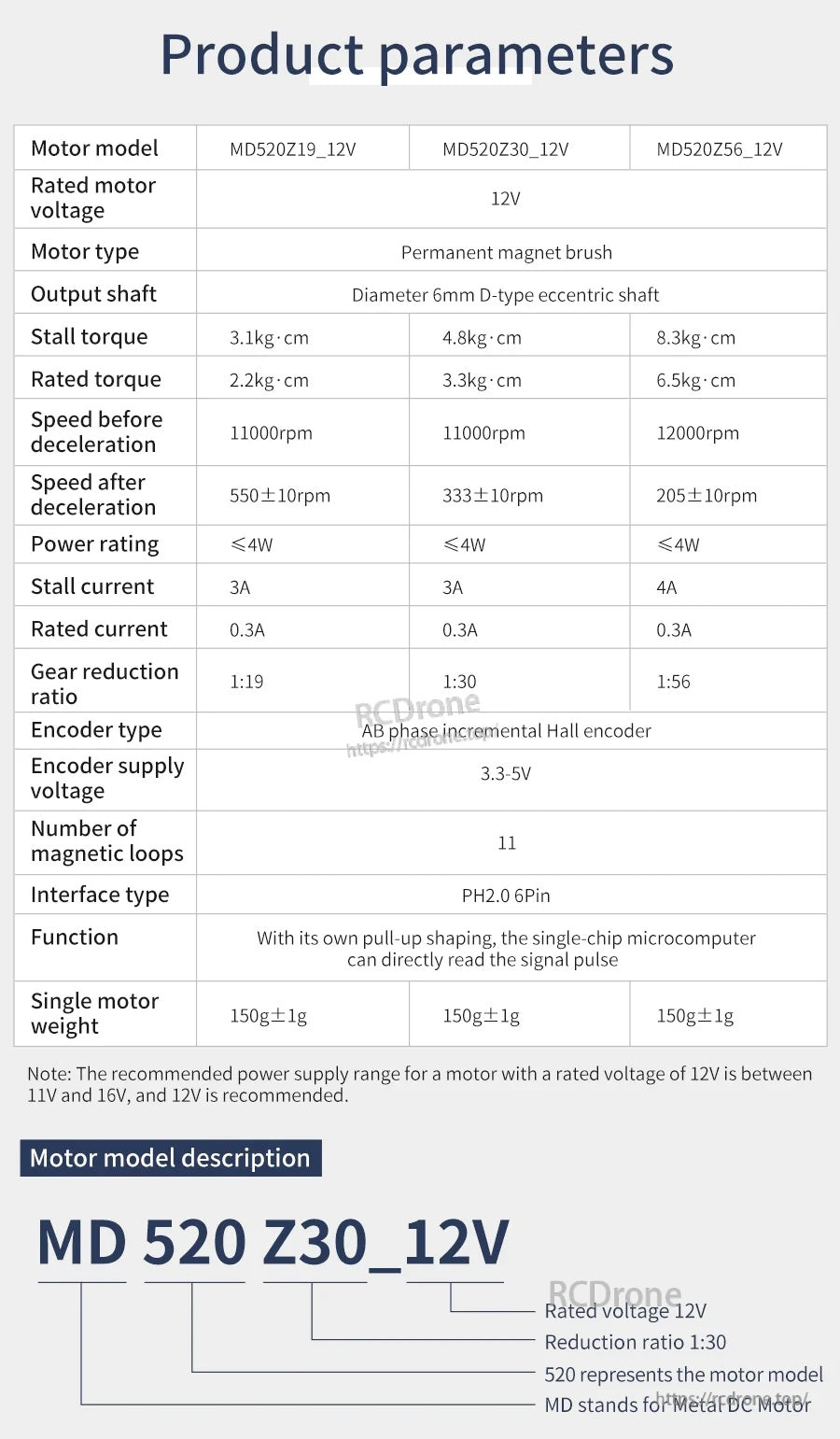
規格
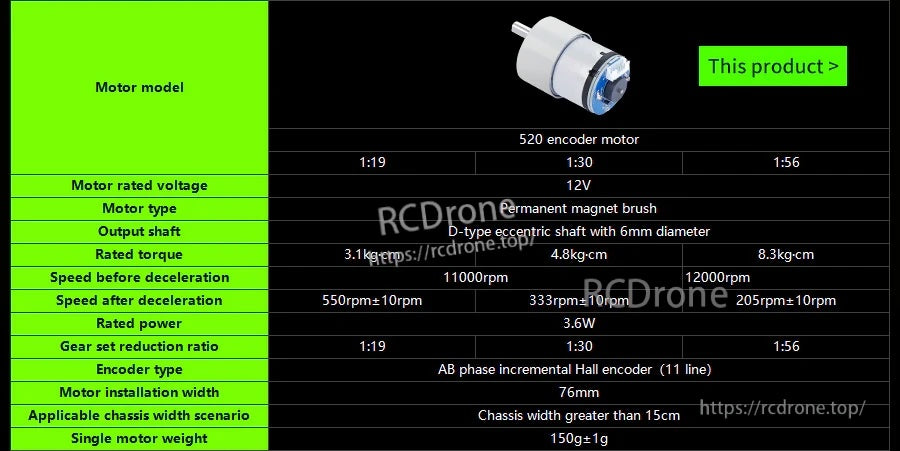
| 參數 | MD520Z19_12V | MD520Z30_12V | MD520Z56_12V |
|---|---|---|---|
| 額定電機電壓 | 12V | 12V | 12V |
| 電機類型 | 永磁碳刷 | ||
| 輸出軸 | 直徑 6mm D型偏心軸 | ||
| 堵轉扭矩 | 3.1 kg*cm | 4.8 kg*cm | 8.3 kg*cm |
| 額定扭矩 | 2.2 kg*cm | 3.3 kg*cm | 6.5 kg*cm |
| 減速前速度 | 11000 rpm | 11000 rpm | 12000 rpm |
| 減速後速度 | 550 +/- 10 rpm | 333 +/- 10 rpm | 205 +/- 10 rpm |
| 功率額定值 | <= 4W | <= 4W | <= 4W |
| 額定功率(顯示) | 3.6W | ||
| 堵轉電流 | 3A | 3A | 4A |
| 額定電流 | 0.3A | 0.3A | 0.3A |
| 齒輪減速比 | 1:19 | 1:30 | 1:56 |
| 編碼器類型 | AB相增量霍爾編碼器 | ||
| 編碼器供電電壓 | 3.3-5V | ||
| 磁環數量 | 11 | ||
| 介面類型 | PH2.0 6Pin | ||
| 功能 | 具有自身上拉整形,單片機可直接讀取信號脈衝 | ||
| 馬達安裝寬度 | 76mm | ||
| 適用底盤寬度場景(如圖) | 底盤寬度大於15cm | ||
| 單個馬達重量 | 150 g +/- 1 g | 150 g +/- 1 g | 150 g +/- 1 g |
電源說明(如圖): 對於額定電壓為12V的馬達,建議的電源範圍是11V到16V,推薦使用12V。
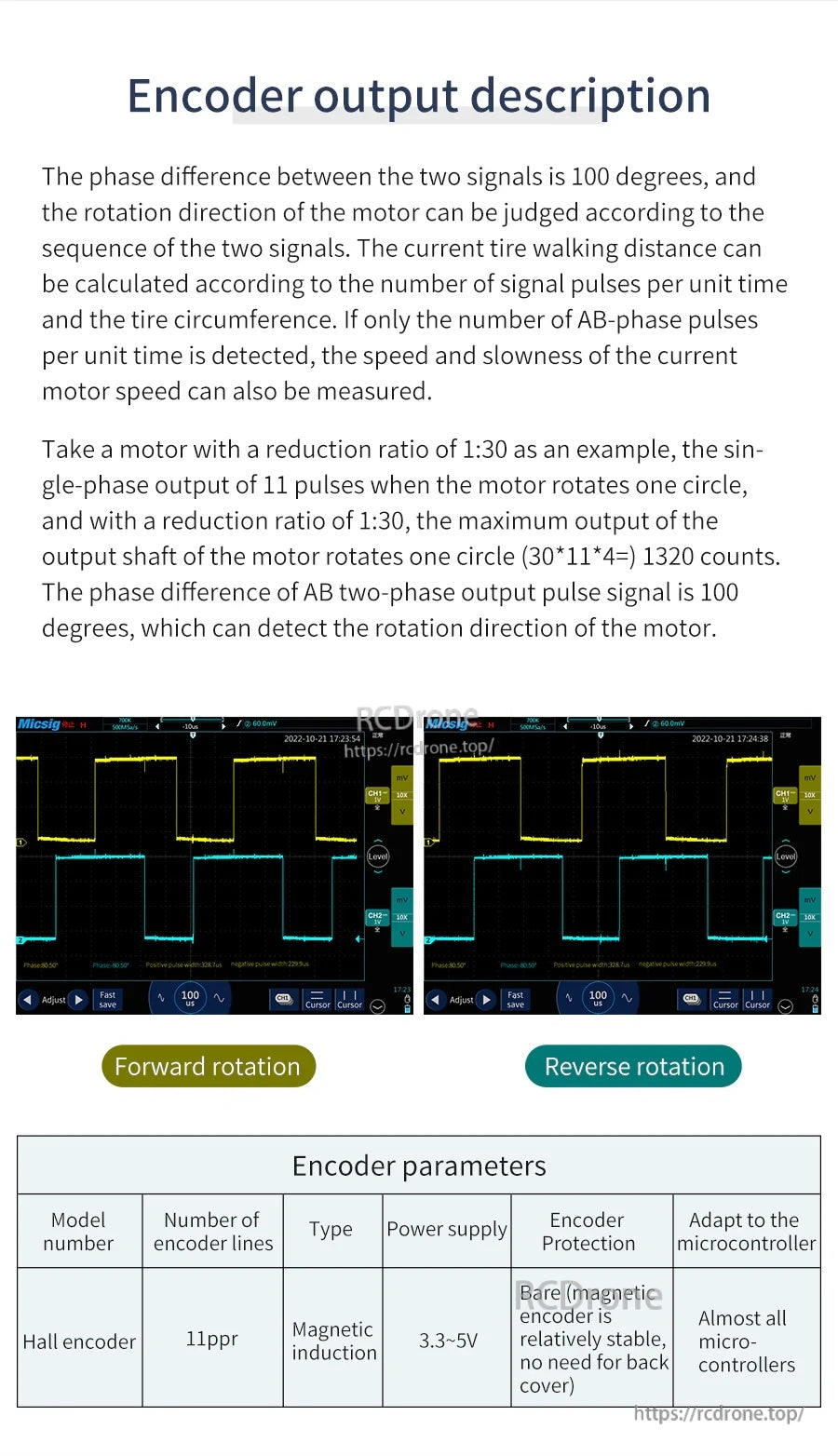
編碼器輸出說明(如圖)
- 兩個信號之間的相位差:100度
- 霍爾編碼器:11 ppr,磁感應,電源3。3-5V
- 1:30 減速比的示例:單相輸出為每電機轉一圈11個脈衝;最大輸出軸每轉計數:(30 * 11 * 4)= 1320 計數
- 編碼器保護說明(如圖所示):裸露的磁性編碼器相對穩定,無需背蓋
- 適應微控制器(如圖所示):幾乎所有微控制器
應用
- 平衡車
- 四輪推車 / 智能車底盤
- 麥克納姆輪車
- 阿克曼轉向車
- 導航和定位車
如需產品選擇和整合支持,請聯繫https://rcdrone.top/或發送電子郵件至 [email protected].
詳情
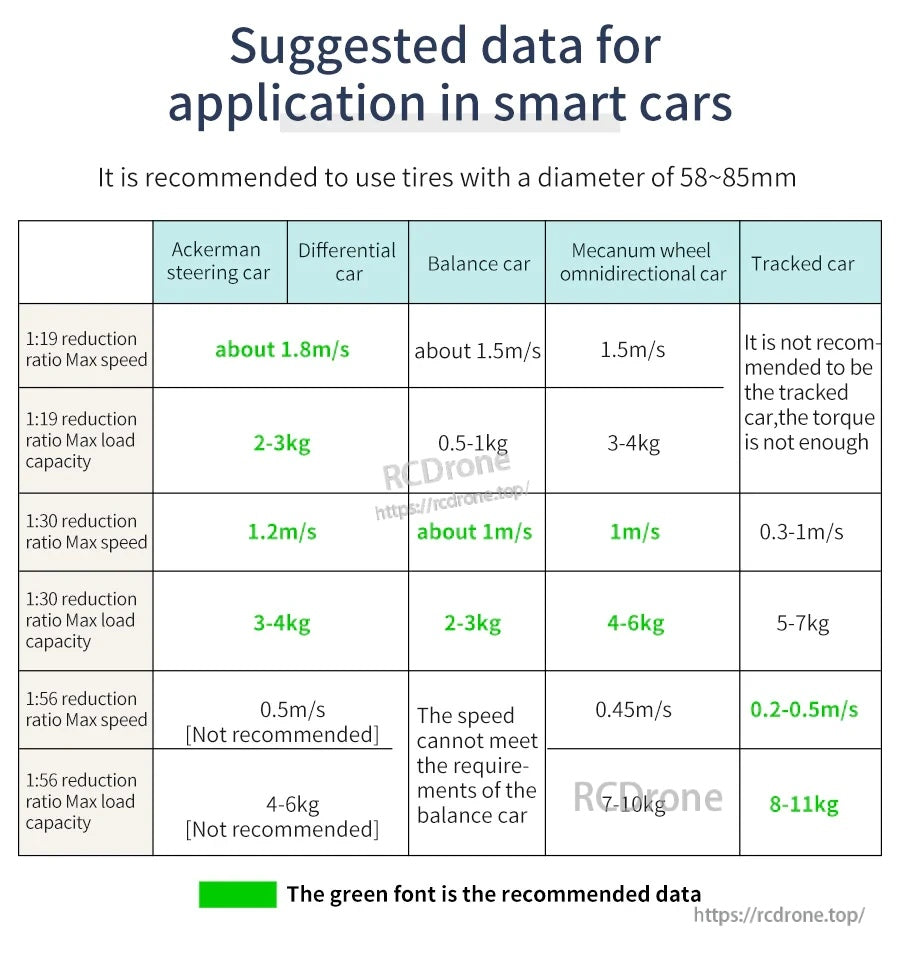
使用配備編碼器的520齒輪電機,在智能車和平衡車構建中獲得可靠的速度和方向反饋。
選擇1:19、1:30或1:56減速比,以平衡底盤和車輪設置的速度和扭矩。



高精度霍爾編碼器與全金屬齒輪箱配對,以保持負載下的控制迴路穩定。
完整的參數表列出了堵轉/額定扭矩、輸出轉速、電流和3.3–5V編碼器供電範圍。
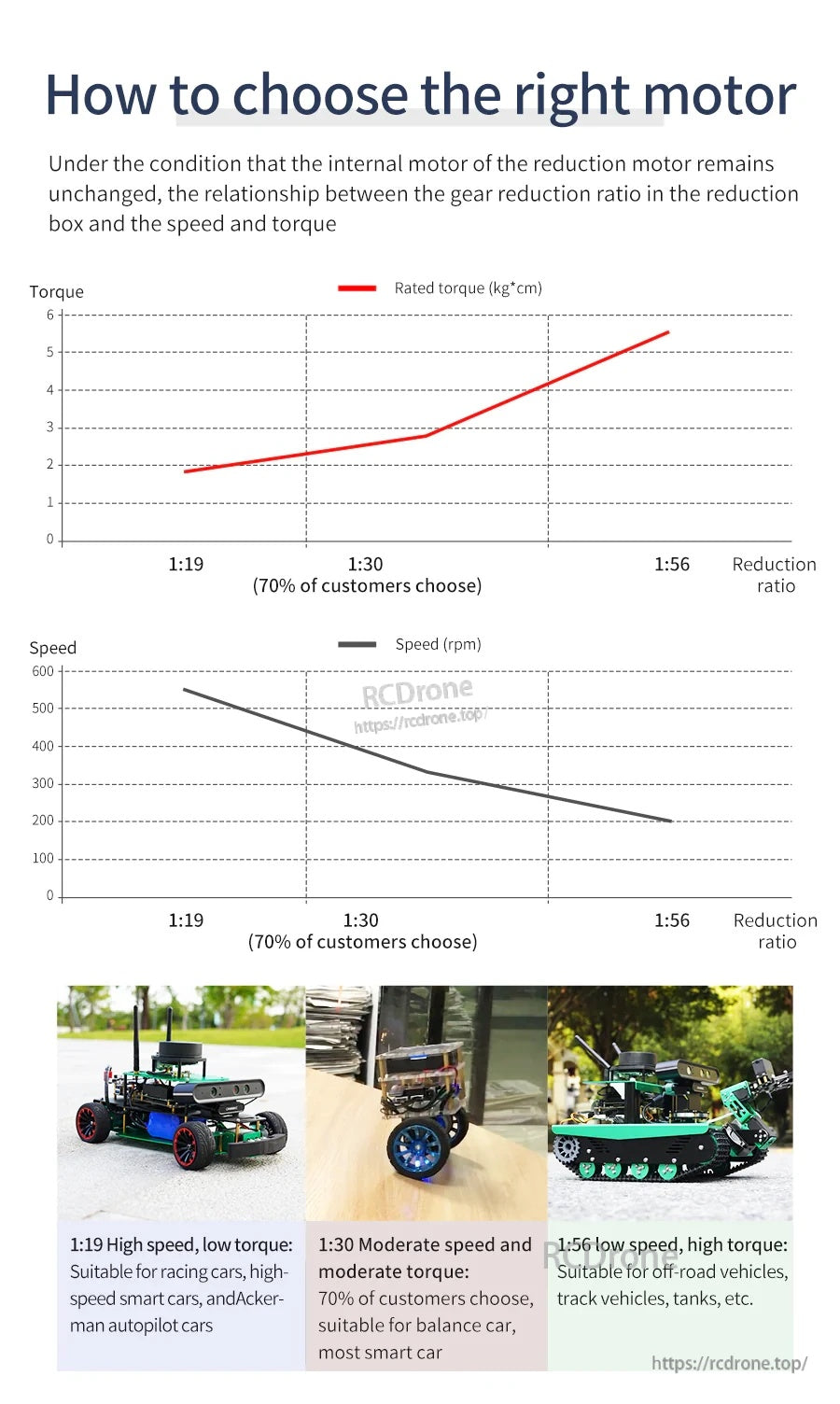
使用比率曲線選擇更高速度(1:19)或更高扭矩和更精細控制(1:56)以適應您的車輛。
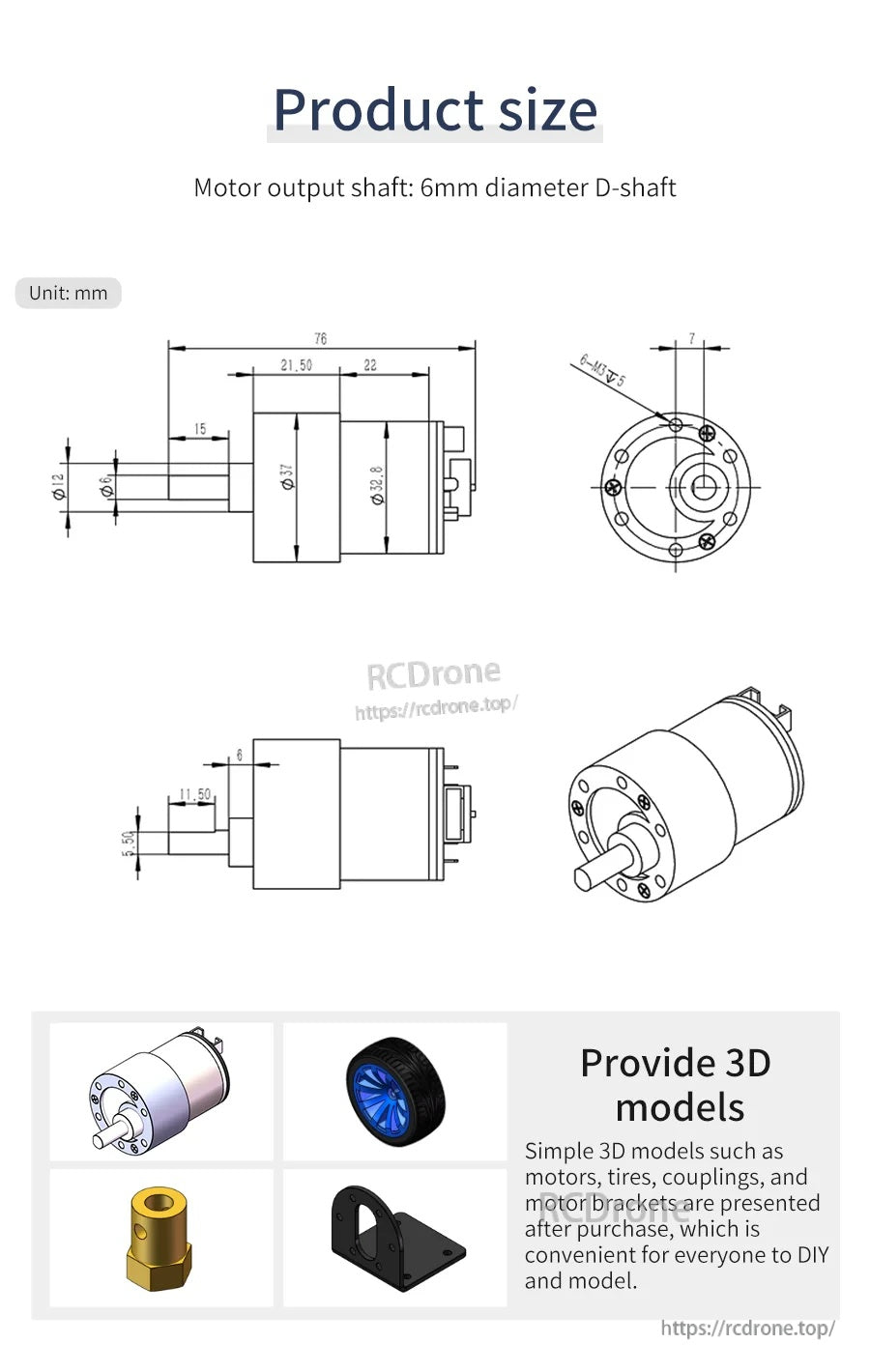
機械圖紙有助於確認配合,包括6mm D型軸輸出和安裝尺寸。

AB相方波輸出使大多數微控制器能夠輕鬆讀取方向和速度。



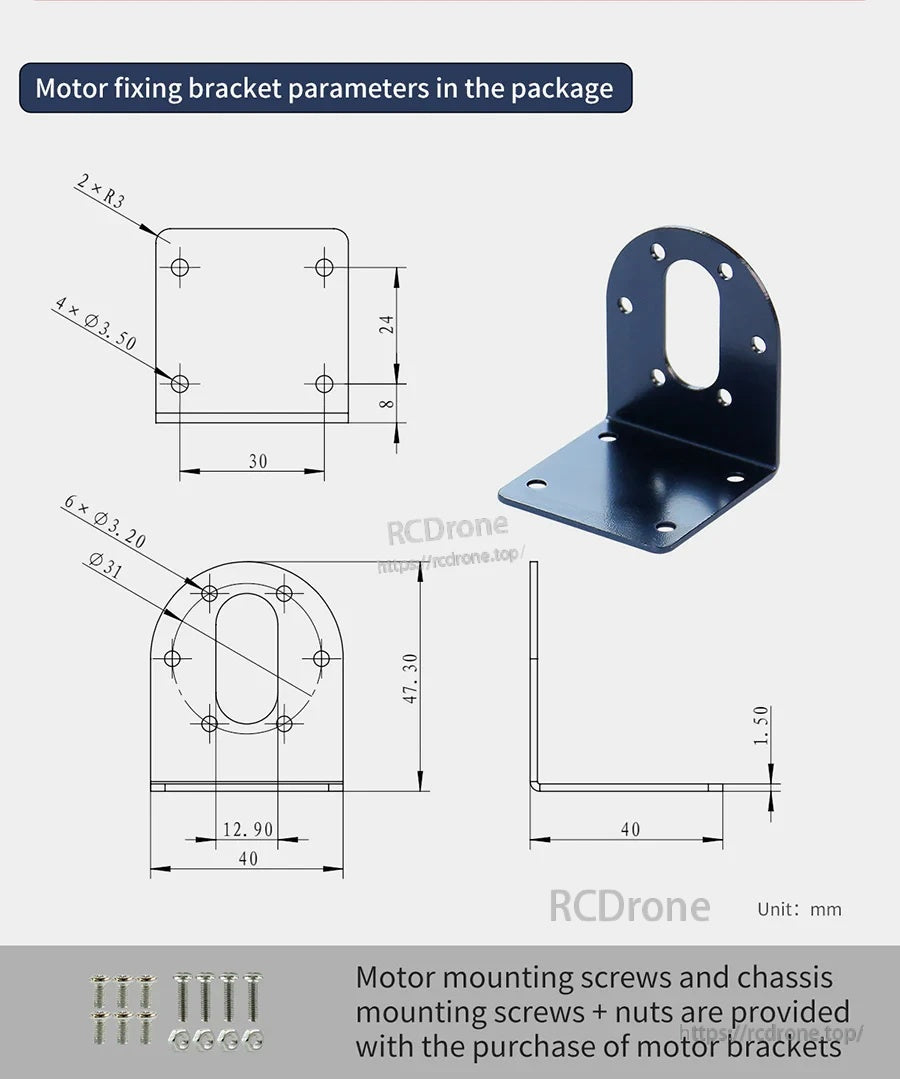
提供安裝支架尺寸以便於底盤佈局,並提供匹配的緊固件。

常見的平台範例包括阿克曼轉向、四輪驅動、麥克納姆驅動、自平衡機器人和履帶式構建。

四通道編碼器馬達驅動模組提供了一種緊湊的方式來連接和控制多個配備編碼器的直流馬達。

雙通道馬達驅動模組配有螺絲端子和針腳接頭,有助於簡化兩個直流馬達的接線。

ROS機器人控制板包括緊湊的PCB佈局,配有散熱片和多個連接器,便於集成到機器人構建中。

STM32自平衡車驅動板提供了一個緊湊的控制PCB,具有多個連接器,用於連接平衡車設置。
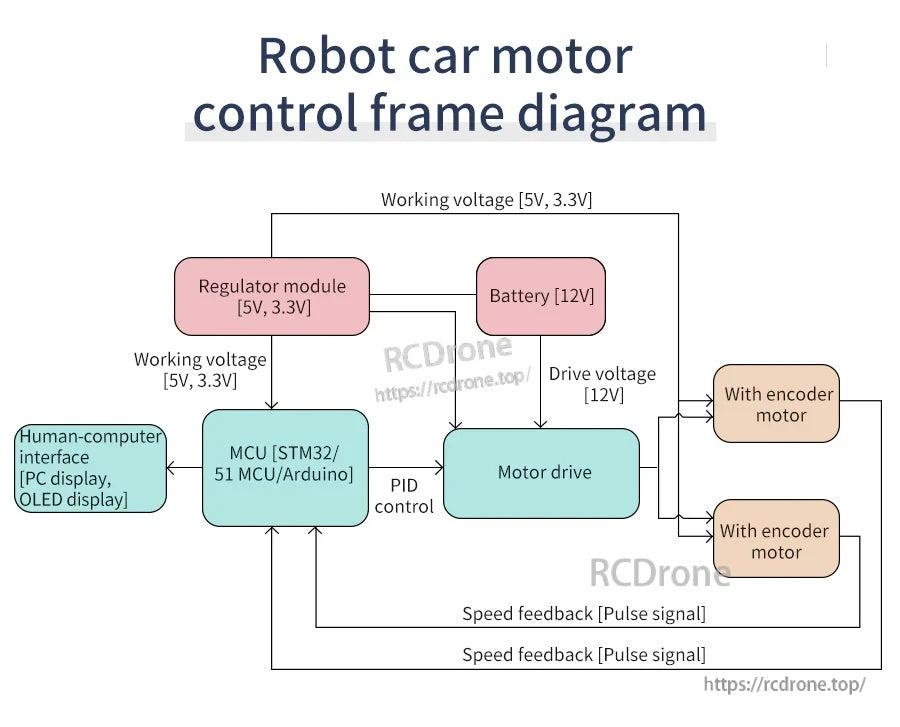
12V電池為馬達驅動器和編碼器馬達供電,並通過穩壓器為MCU提供5V/3.3V電源,用於PID速度控制和脈衝反饋。
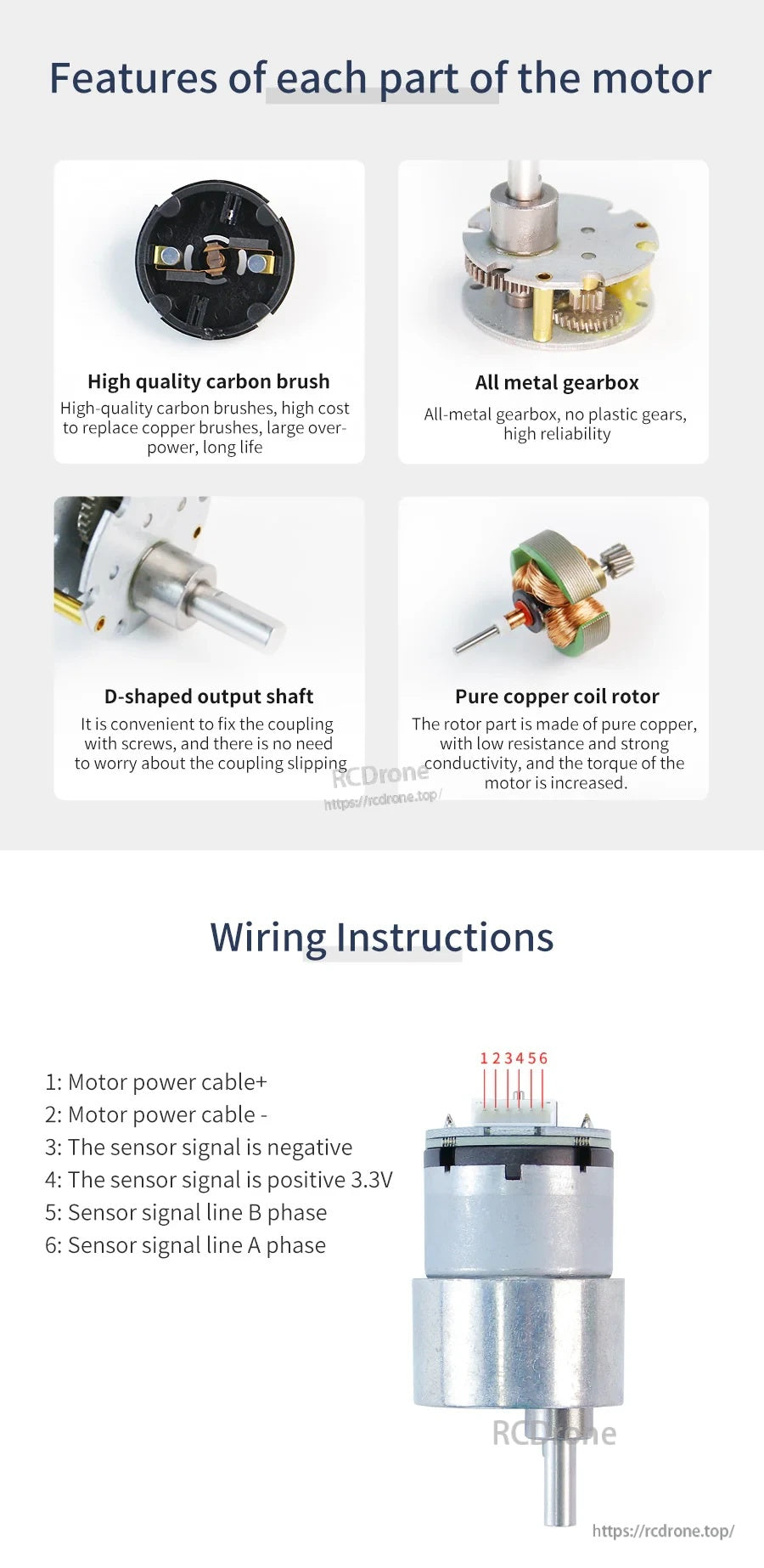
MD520直流齒輪馬達的詳細信息包括全金屬齒輪箱、D形輸出軸、碳刷和帶有馬達電源和傳感器信號線的6針連接器。
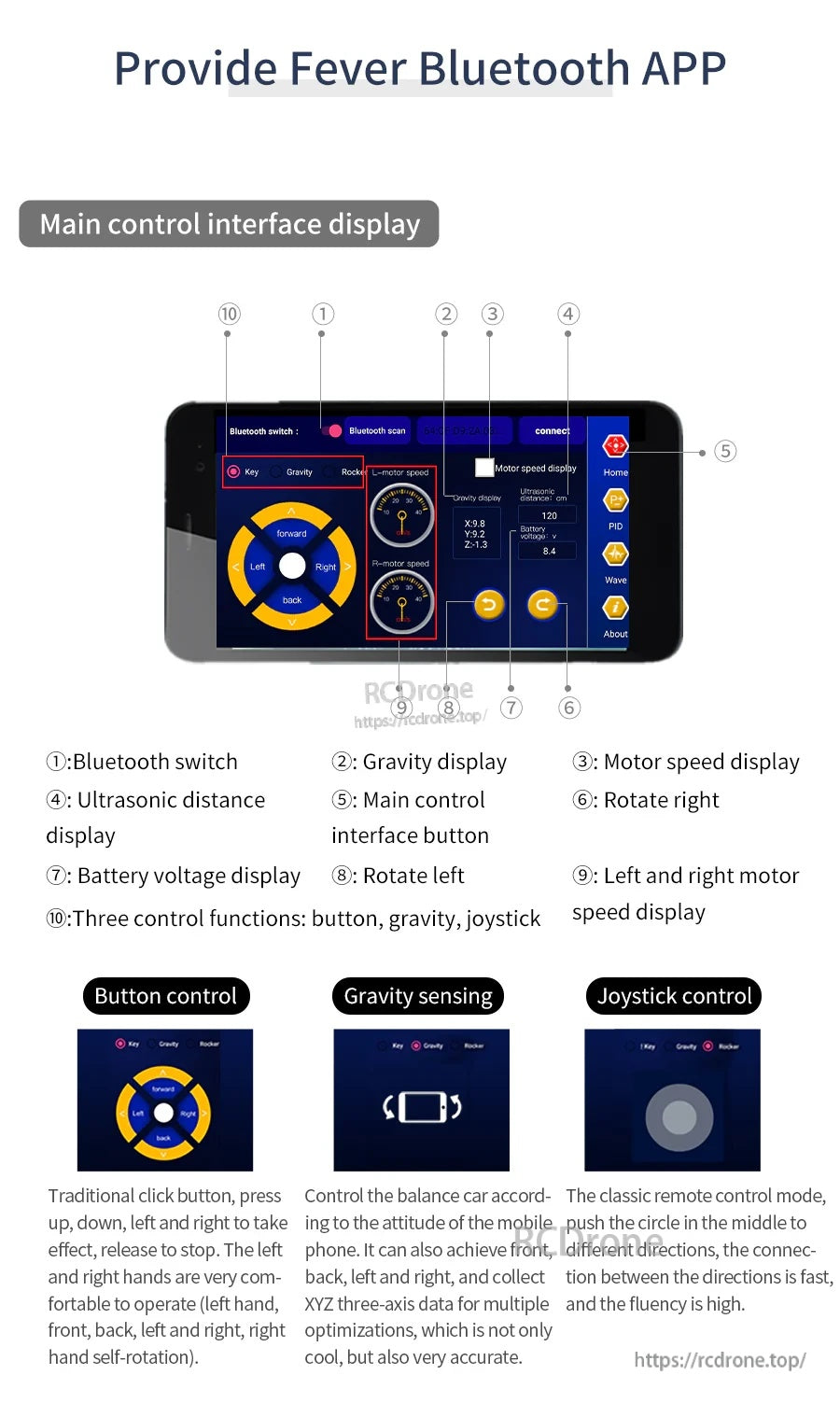
Fever Bluetooth 應用程式提供按鈕、重力感應和搖桿控制選項,並在螢幕上顯示馬達速度和電池電壓讀數。
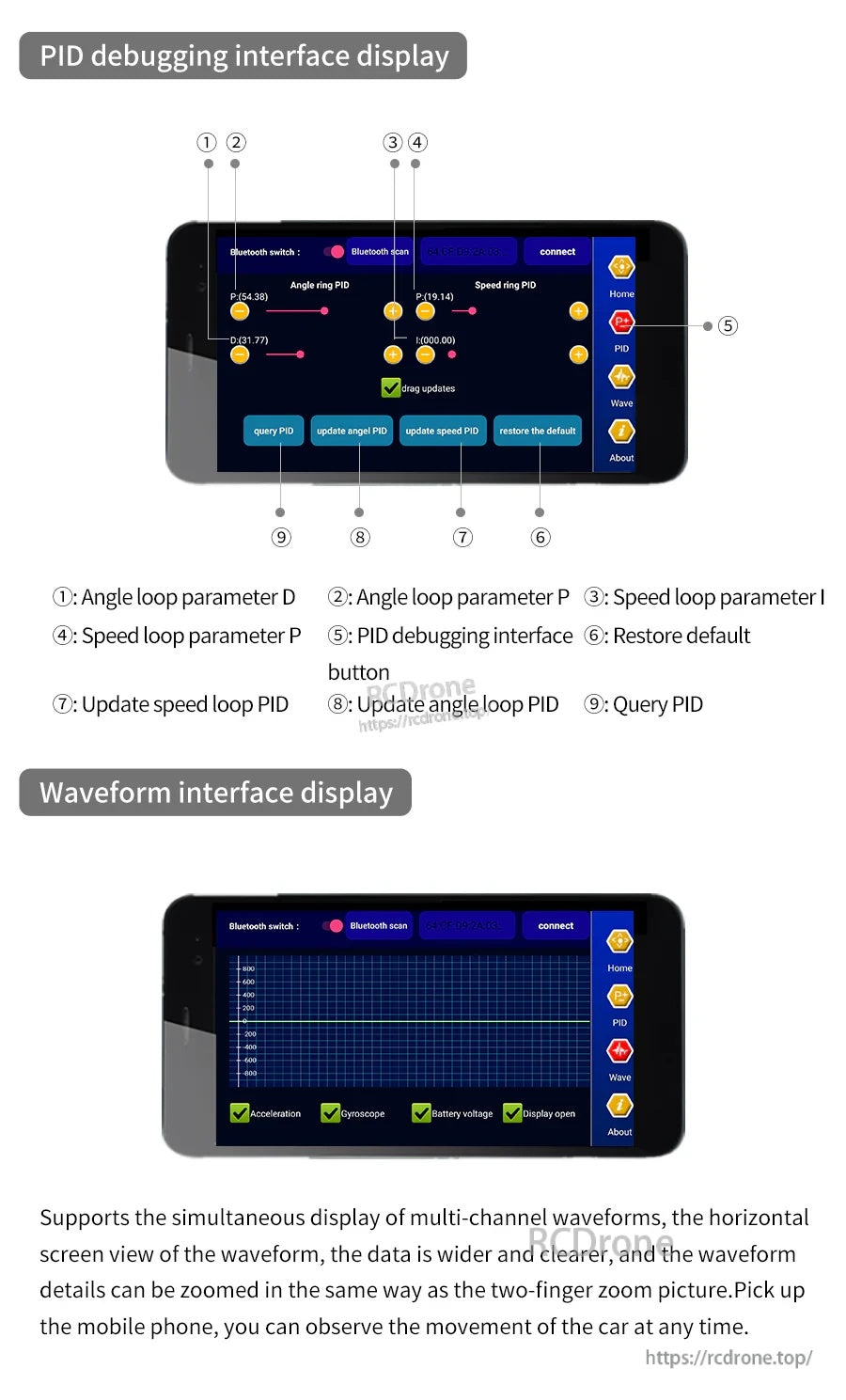
PID 調整畫面提供角度和速度迴路參數控制,並可查看多通道波形和藍牙連接。
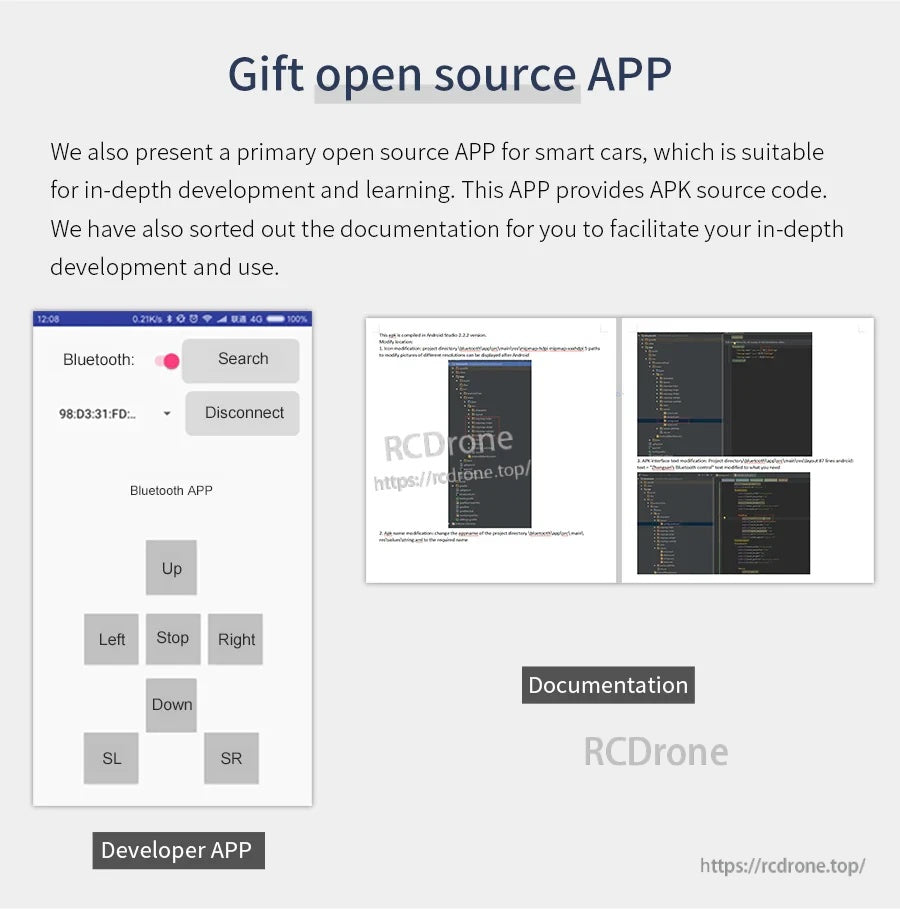
開源開發者應用程式具有藍牙控制和配套文件,支持智能車開發和調整。
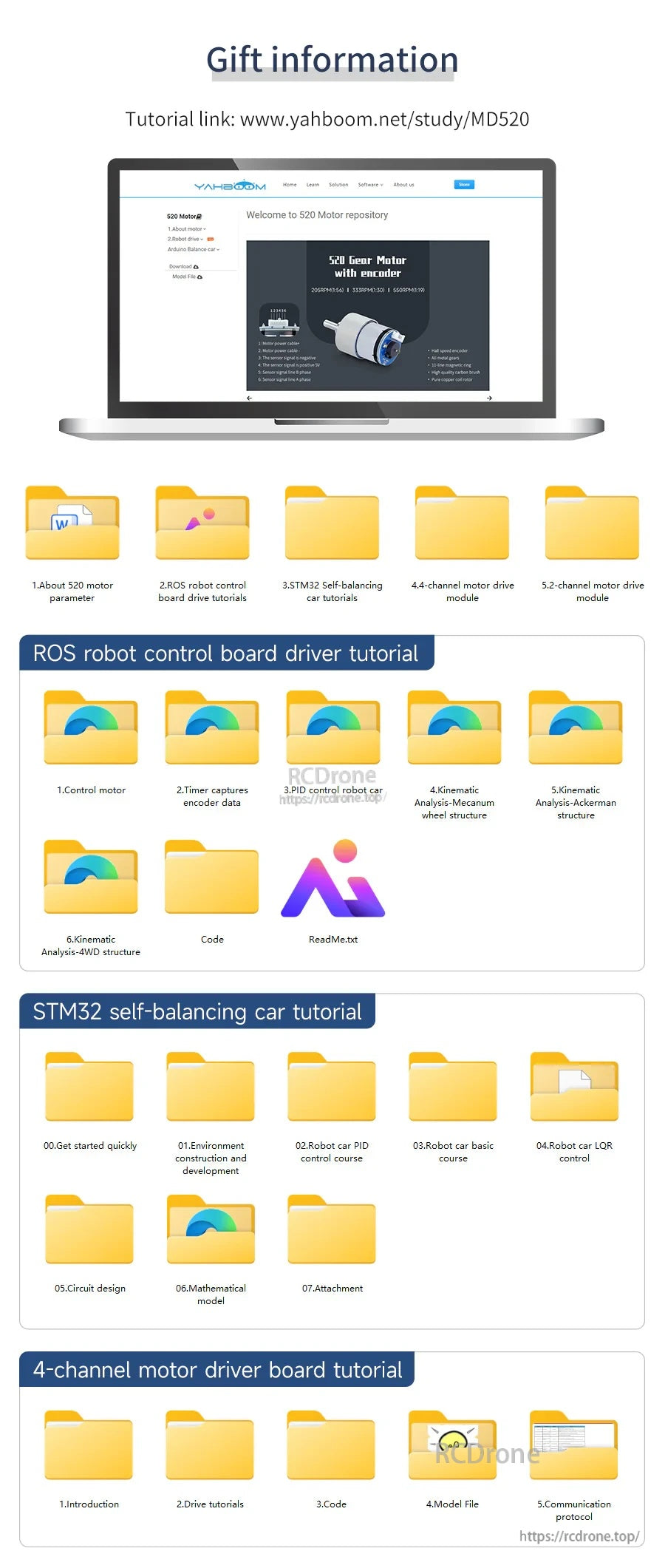
MD520 支援文件包括 ROS 機器人控制、STM32 自平衡車專案和 4 通道馬達驅動板的驅動程式和教程資料夾。
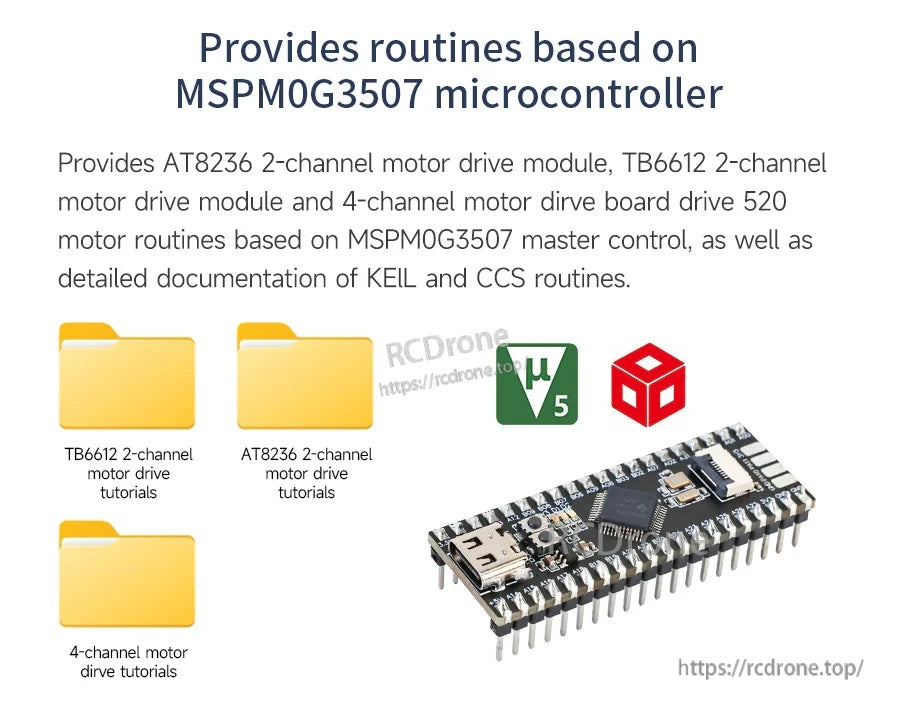
基於 MSPM0G3507 的例程支持 AT8236 和 TB6612 馬達驅動模組,並提供 KEIL 和 CCS 馬達控制專案的程式碼文件。

MD520 編碼器齒輪馬達套件包括 20cm PH2.0 6-pin 單頭和雙頭電纜,以及匹配的 6-pin 插座以便接線。
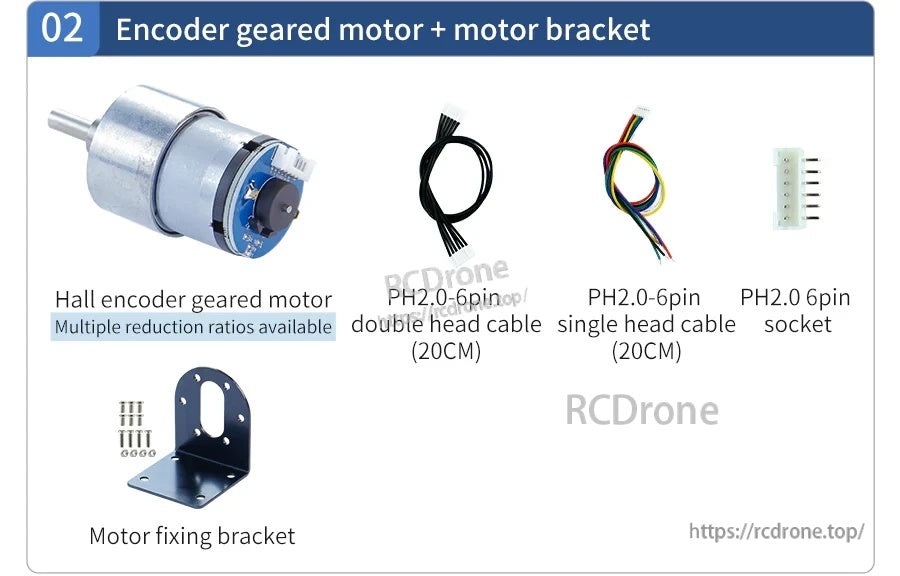
MD520 編碼器齒輪馬達套件包括金屬安裝支架以及 PH2.0 6 針電纜選項和匹配插座,以實現更整潔的佈線。
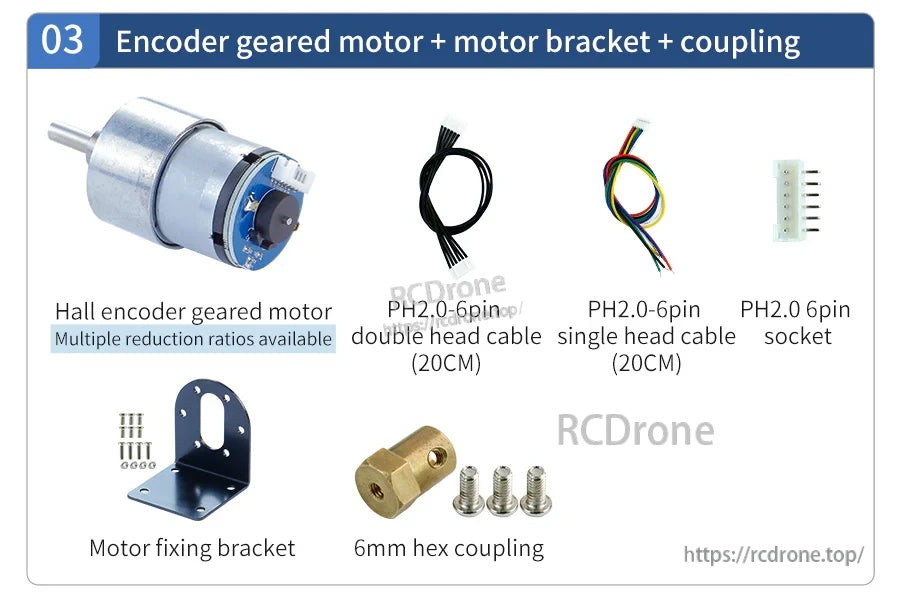
編碼器齒輪馬達套件包括馬達固定支架、6mm 六角聯軸器和 PH2.0 6 針電纜和插座,用於佈線。
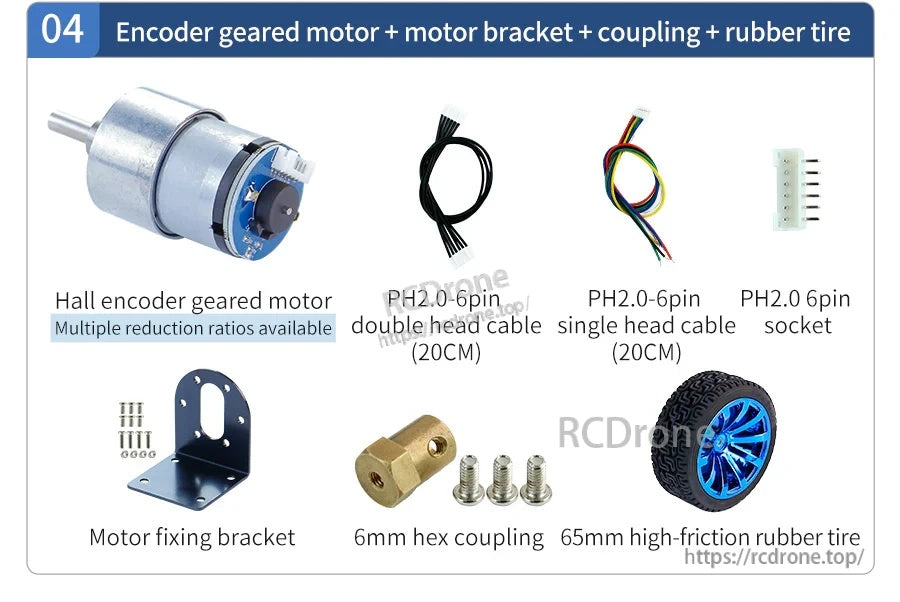
MD520 12V 直流齒輪馬達套件包括霍爾編碼器馬達、馬達固定支架、6mm 六角聯軸器、PH2.0 編碼器電纜、插座和高摩擦橡膠輪胎,用於底盤構建。








