










PALMSLAM 手持式 LiDAR 掃描儀,適用於 2D SLAM 繪圖與導航,支援 microROS WiFi-UDP,LiDAR 可選
PALMSLAM 手持式 LiDAR 掃描儀,適用於 2D SLAM 繪圖與導航,支援 microROS WiFi-UDP,LiDAR 可選
Yahboom
無法載入取貨服務供應情況
概述
PALMSLAM 是一款用於2D地圖繪製和導航的手持式LiDAR掃描儀。它支持通過握持設備進行實時地圖繪製和距離測量,同時LiDAR數據通過microROS解決方案無線傳輸到主機,以便在虛擬機或手機APP上實時查看。
PALMSLAM 集成了一個帶有ESP32處理器和內置六軸IMU的LiDAR擴展板。IMU實時監控握持姿勢,幫助在地圖繪製過程中保持設備水平,以獲得更高精度的數據,並且還可以通過傾斜切換不同的LiDAR模式。
如有售前問題和訂購支持,請聯繫[email protected] or 訪問https://rcdrone.top/.
主要特點
- 實時地圖繪製 ,可在虛擬機和/或手機APP上顯示。
- 兼容多種LiDAR (LiDAR可選):YDLIDAR X3 Pro, YDLIDAR 4ROS, SLAM C1, T-mini Plus, MS200。
- 使用 WiFi-UDP 的 microROS 無線通信在 PALMSLAM 和主機(虛擬機/計算機)之間。
- 集成六軸 IMU 用於穩定的映射姿態監控和傾斜警告(蜂鳴器警報;用戶可設置警報傾斜角度)。
- 左右傾斜以切換 LiDAR 模式; 返回中心表示切換成功。
- OLED 信息顯示(示例屏幕:“選擇 Lidar”、“LIDAR: TminiPlus”和距離讀數如“Dis: 1.680”)。
- 手機支架調整: 360° 旋轉調整和 180° 俯仰角調整。
- 內置電池組: 7.4V 2000mAh;工作時間長達 4 小時;電池使用 18650 鋰電池單元。
- ROS2 系統: 使用 ROS2 humble (ROS2-Humble) 開發。
- 支持 RViz 模擬,用於在 SLAM/地圖構建過程中可視化反饋激光雷達和里程計數據。
規格
| 產品 | PALMSLAM 手持式 LiDAR 掃描儀 |
| 支持的 LiDAR 型號(可選) | YDLIDAR X3 Pro; T-mini Plus; SLAM C1; MS200; YDLIDAR 4ROS |
| 無線通信 | microROS WiFi-UDP |
| 板載處理器 | ESP32 處理器(內建 Wi-Fi 和藍牙) |
| IMU | 內建六軸 IMU |
| 傾斜警告 | 蜂鳴器警報提示;用戶可設置警報傾斜角度 |
| 顯示 | OLED(用於距離/型號/狀態顯示) |
| 電池組 | 7.4V 2000mAh |
| 運行時間 | 最多 4 小時 |
| 電池單元 | 18650 鋰電池單元 |
| 手機支架調整 | 360° 旋轉調整;180° 俯仰角調整 |
| 系統/軟體 | ROS2 humble (ROS2-Humble);支持多種地圖繪製方法,包括 Gmapping 和 Cartographer |
| 主機選項提及 | PC 虛擬機;Raspberry Pi 5;Jetson Nano;RDK X5;RDK 開發板 |
| 注意 | 不支持 Mac 系統 |
LiDAR 擴展板(接口 & 控制)&
- 天線接口
- 蜂鳴器
- 電池充電接口
- 電源開關
- 重置按鈕
- 內建六軸IMU
- OLED螢幕介面
- BOOT按鈕和自定義按鈕
- Type-c串口
- 電源接口 (DCIN 6V-8.4V)
- 按鈕 1
- MS200 激光雷達介面
- YDLIDAR X3 PRO / T-mini Plus 激光雷達介面
- YDLIDAR 4ROS 激光雷達介面
- SLAMC1 激光雷達介面
操作說明(來自提供的過程)
- 手持激光雷達測距:激光雷達前方的距離信息顯示在OLED上;當距離小於預設值時,會觸發蜂鳴器警告。
- 快速製圖步驟:(1)開啟設備(2)左右傾斜選擇防抖警報級別和激光雷達型號(3)配置IP,連接代理,並在虛擬機上開始建立地圖(4)開始手持製圖。
- WiFi-UDP 模式:連接到虛擬機/計算機的 WiFi-UDP 代理後,虛擬機可以訂閱由 MicroROS 發佈的主題,而無需實體連接到 PALMSLAM;兩者應在同一網段內可被發現。
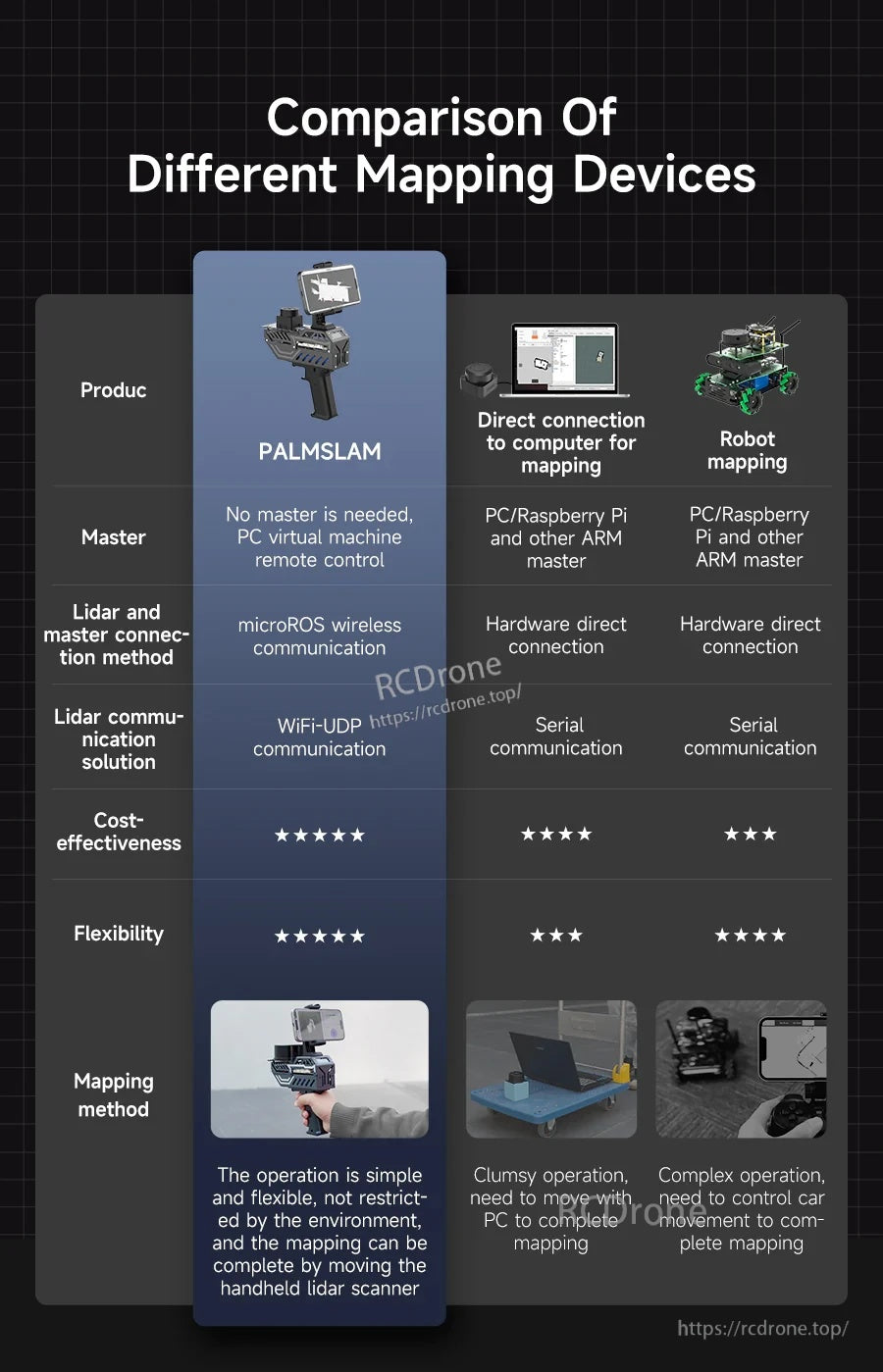
不同測繪設備的比較(提供評分表)
| 項目 | PALMSLAM | 直接連接電腦進行測繪 | 機器人測繪 |
|---|---|---|---|
| 主控 | 不需要主控,PC虛擬機遠程控制 | PC/Raspberry Pi及其他ARM主控 | PC/Raspberry Pi及其他ARM主控 |
| Lidar與主控的連接方式 | microROS無線通信 | 硬件直接連接 | 硬件直接連接 |
| Lidar通信解決方案 | WiFi-UDP通信 | 串行通信 | 串行通信 |
| 性價比(視覺評分) | 5/5 | 4/5 | 3/5 |
| 靈活性(視覺評分) | 5/5 | 3/5 | 4/5 |
| 映射方法 | 操作簡單靈活,不受環境限制,可通過移動手持激光雷達掃描儀完成映射 | 操作笨重,需要與電腦一起移動才能完成映射 | 操作複雜,需要控制車輛移動才能完成映射 |
包含內容
- PALMSLAM 手持設備(可選配激光雷達,或不含激光雷達)
- 即使是標準版(不含激光雷達),也提供五個激光雷達的安裝配件(銅柱/螺絲包)
應用
- 2D SLAM 映射和導航開發
- 使用移動 APP 預覽的實時手持映射
- ROS2(humble)學習、演示和算法驗證(包括 RViz 可視化)
手冊
- 教程/文件:http://www.yahboom.net/study/PALMSLAM
詳情


PALMSLAM 專為手持式 2D SLAM 映射而設計,無線傳輸 LiDAR 數據以便在主機或移動應用上實時查看。

選擇多款可選的LiDAR型號,然後通過WiFi-UDP將掃描數據通過microROS發送到主機進行實時映射。
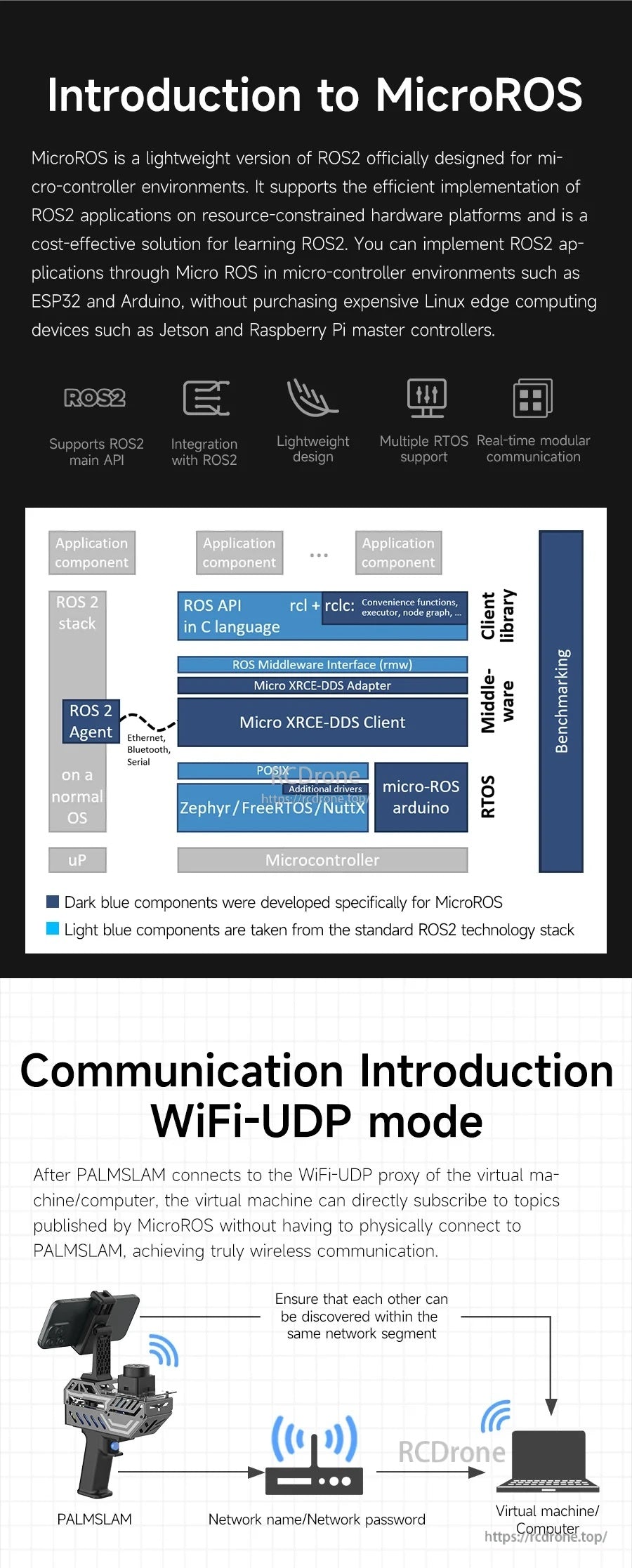
microROS通過WiFi-UDP連接PALMSLAM和主機,保持設置輕量化,同時適合ROS2工作流程。

手持工作流程減少了電纜,與直接連接的機器人或LiDAR設置相比,保持了映射的靈活性。
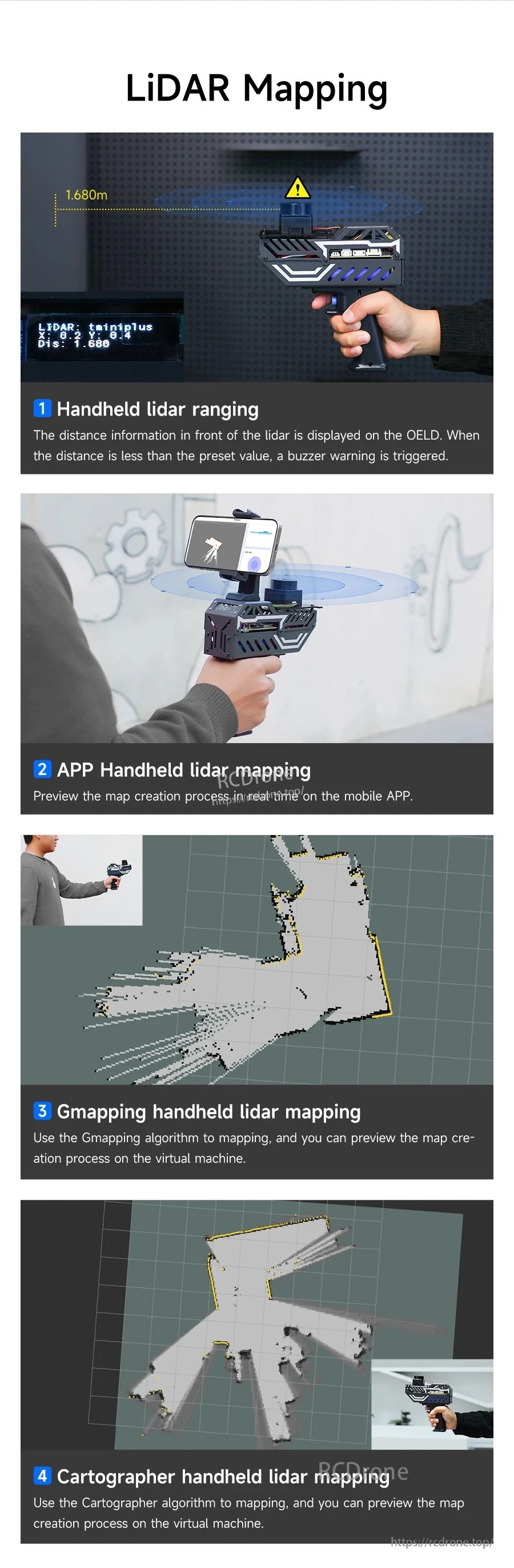
支持多種映射方法,包括Gmapping和Cartographer,並在操作過程中提供實時預覽。
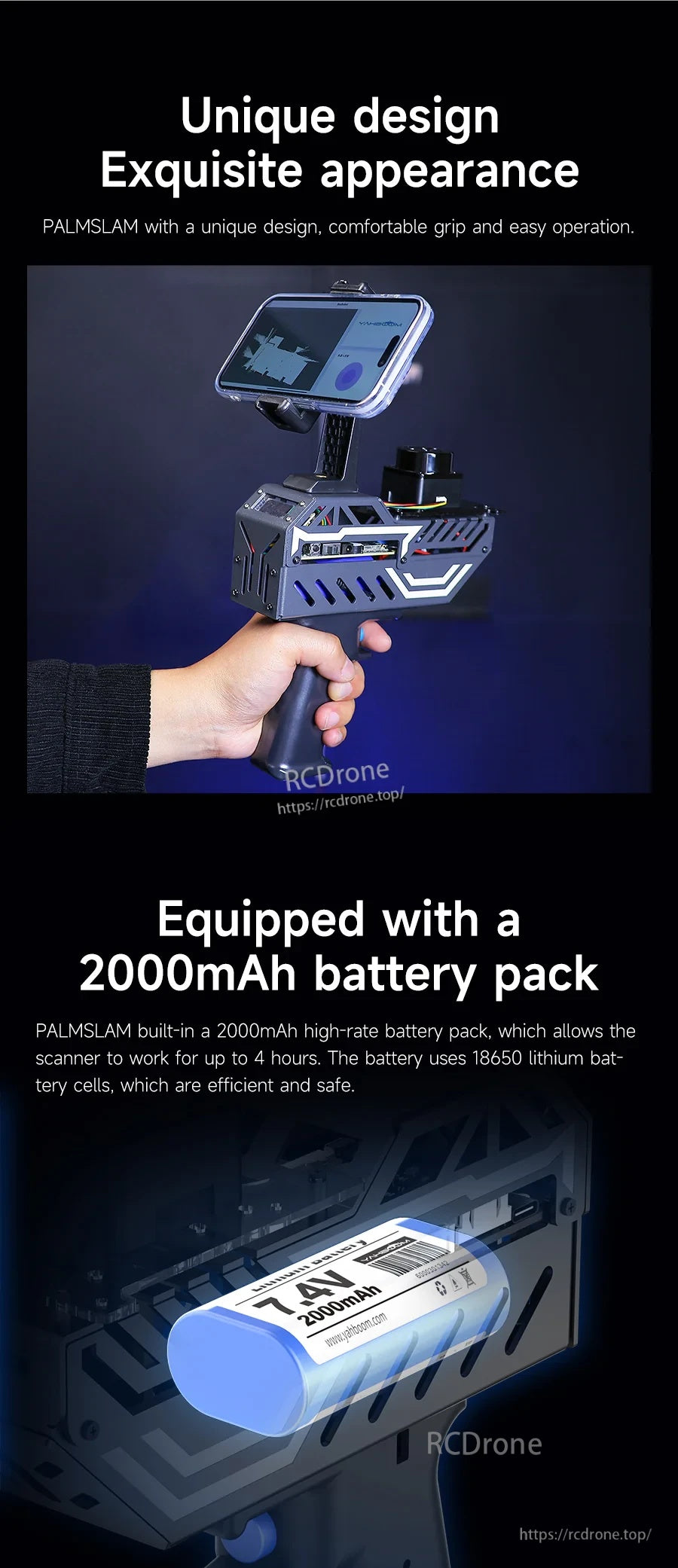
舒適的手槍握把機身配備集成的7.4V 2000mAh電池組,適合長時間使用。
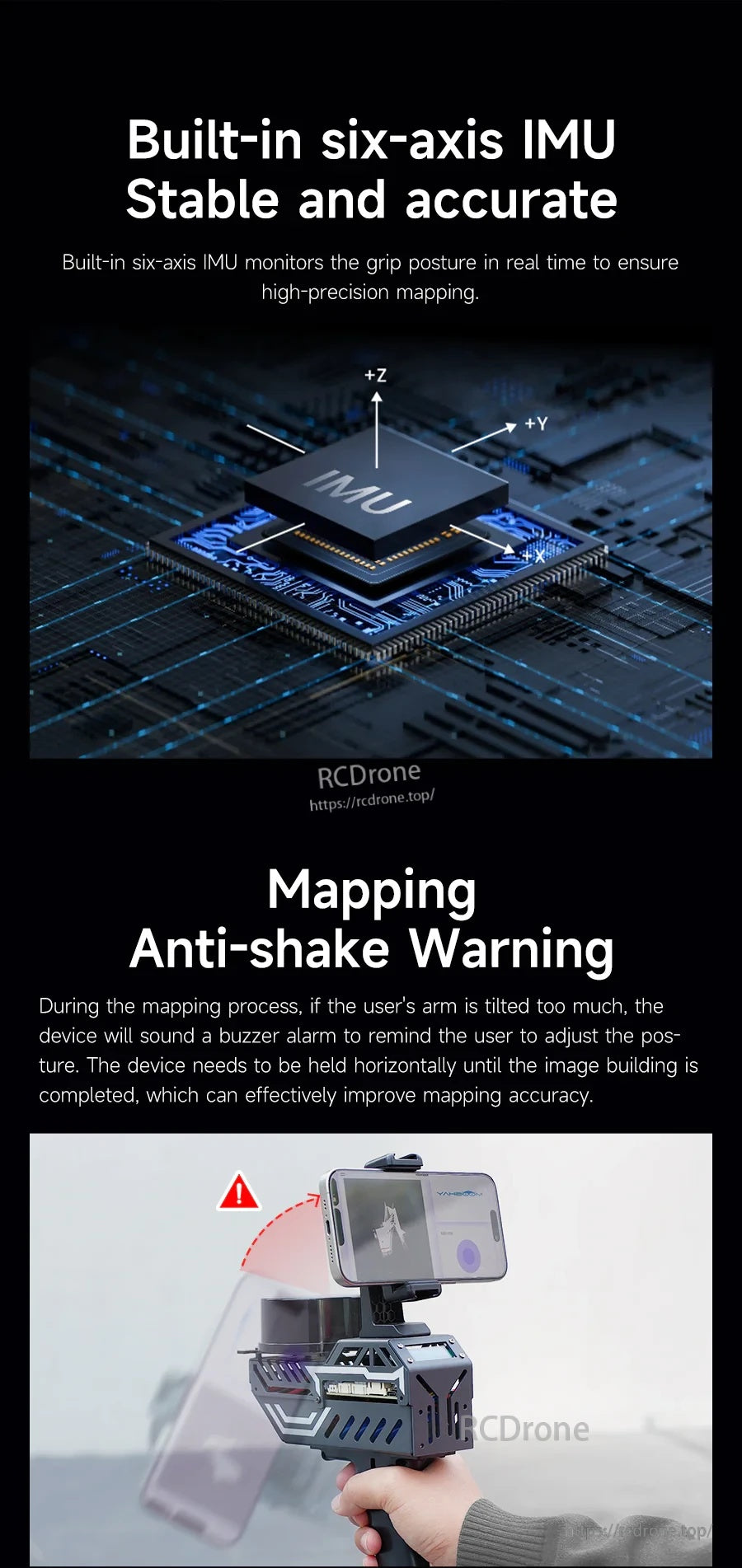
六軸IMU監控姿態,當傾斜超過用戶設置的角度時觸發蜂鳴器警告。
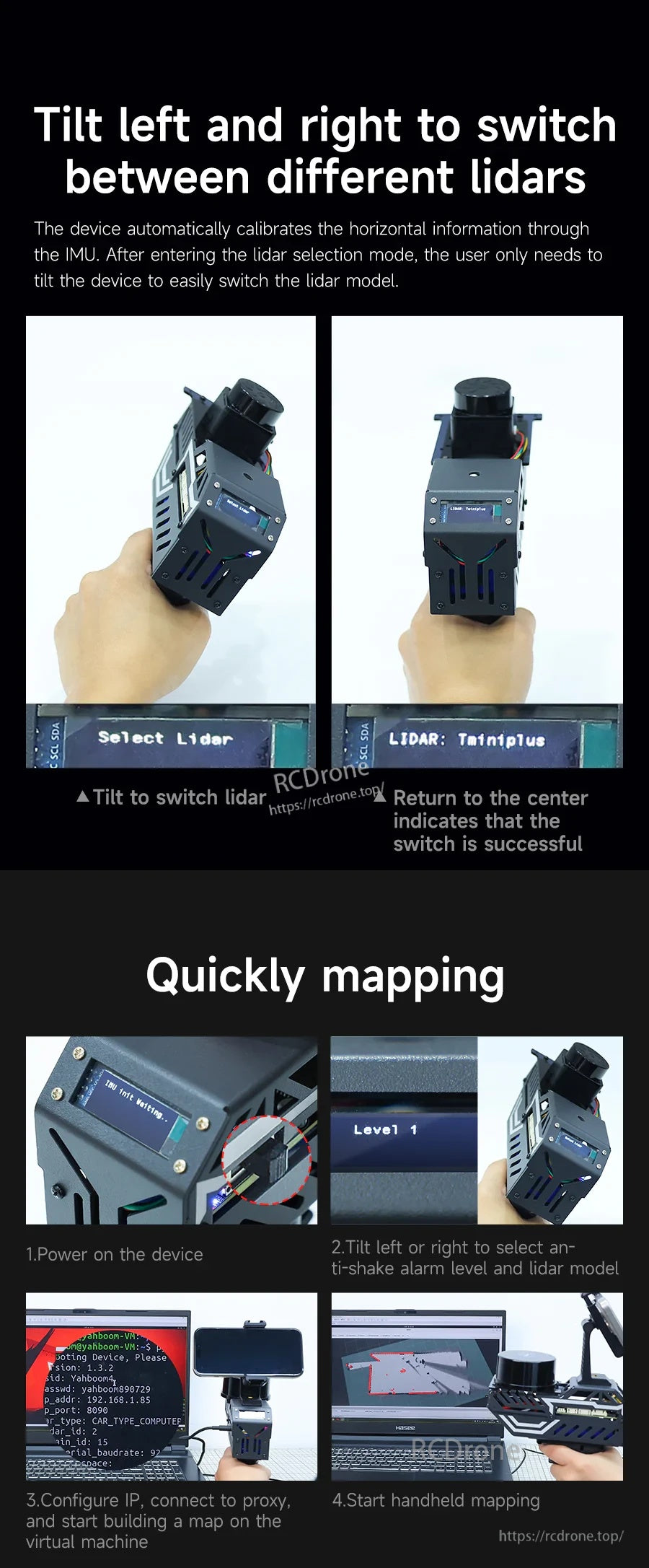
通過向左或向右傾斜切換LiDAR配置文件,然後返回中心以在OLED顯示屏上確認。
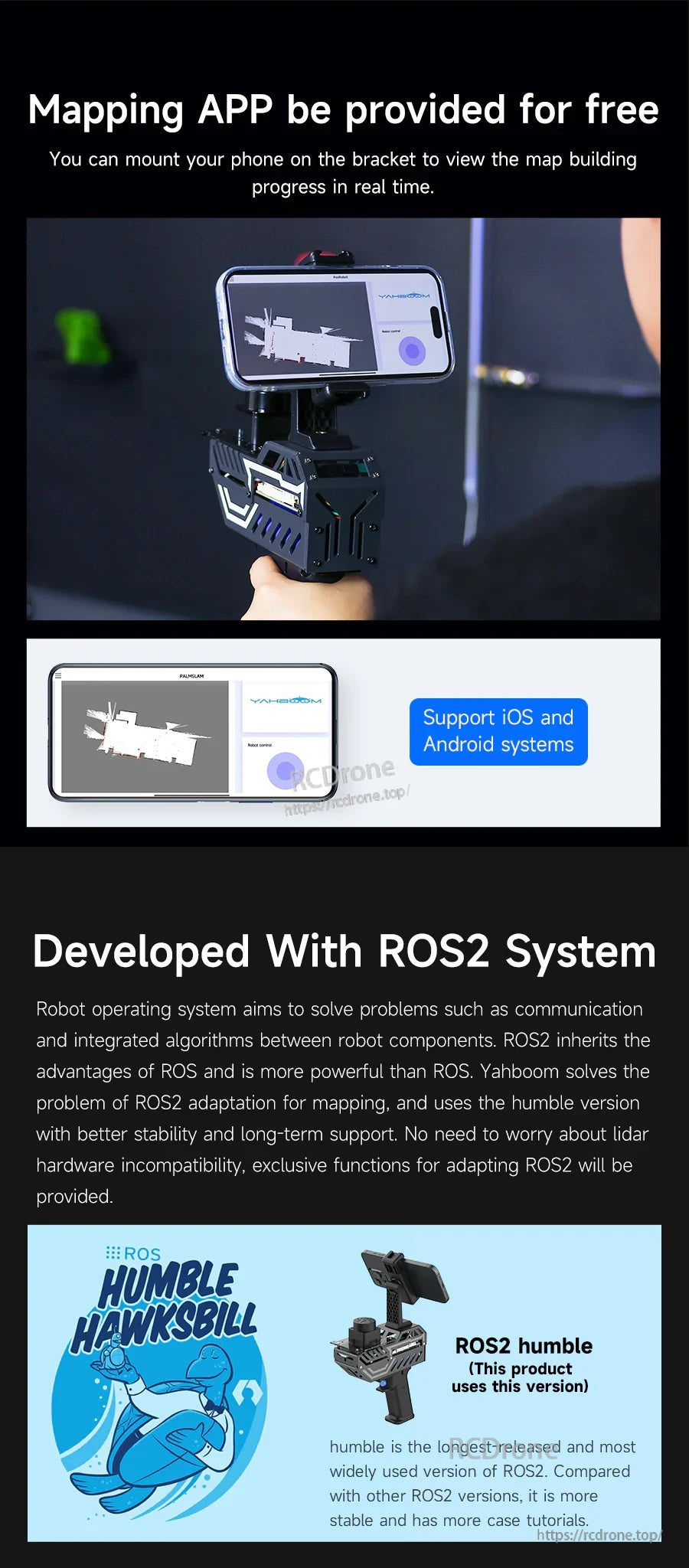
移動地圖繪製可在iOS和Android上使用,系統基於ROS2 Humble開發,用於ROS2項目。
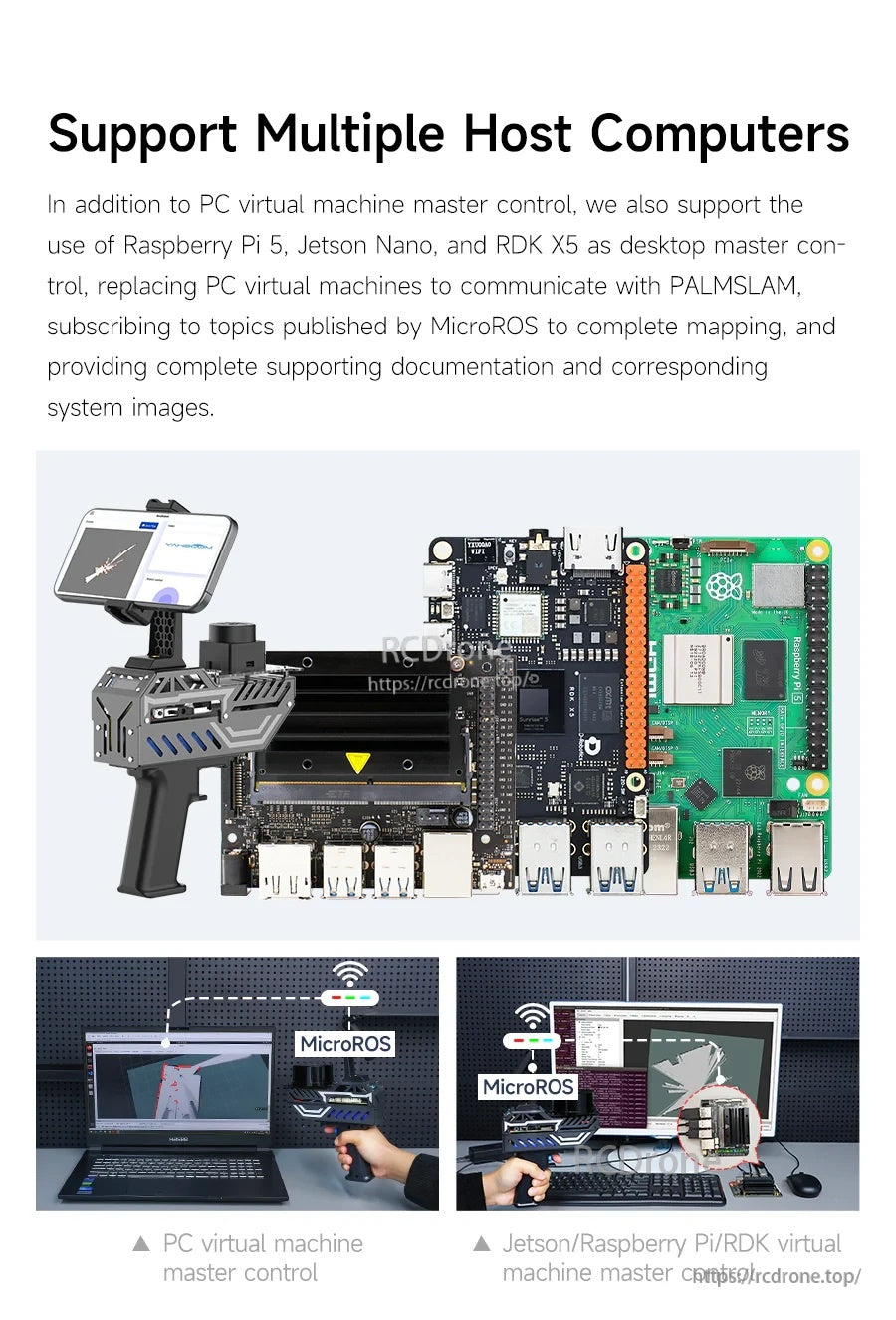
PALMSLAM可以連接到多種主機——從PC虛擬機到Raspberry Pi 5或Jetson——進行SLAM處理。
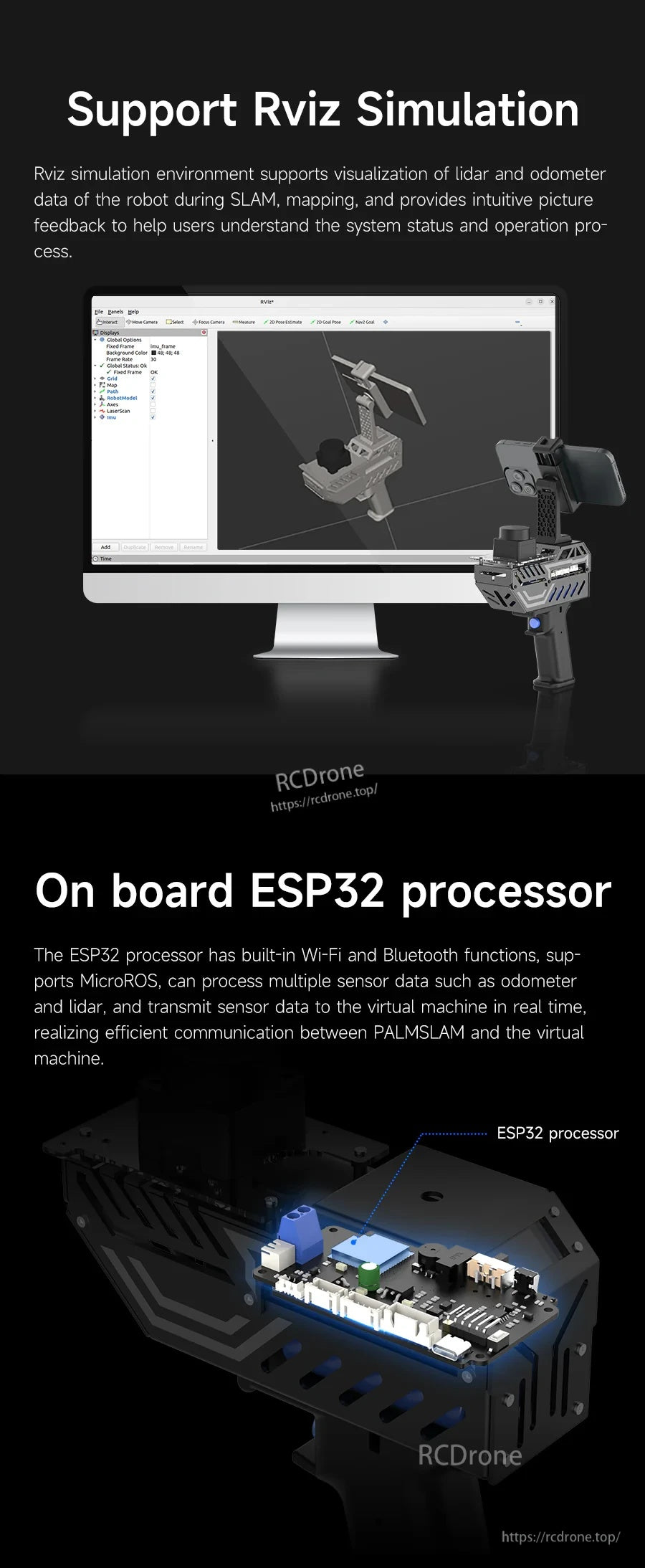
使用RViz可視化LiDAR和里程數據,而板載ESP32則處理無線通信。
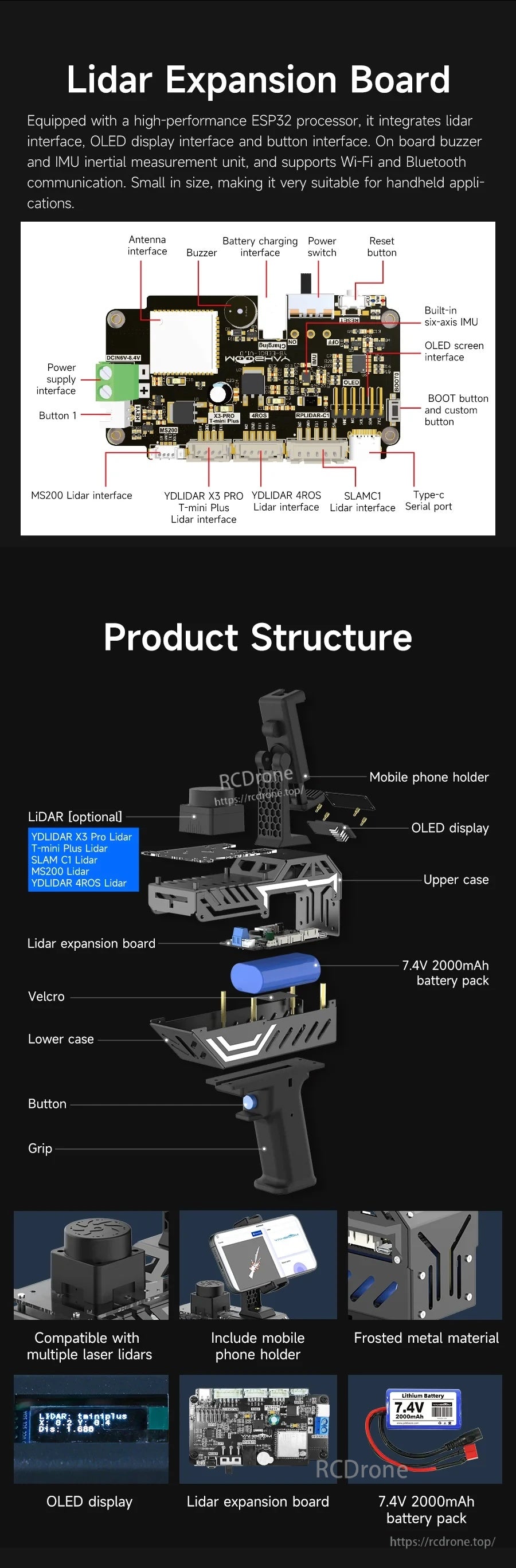
模塊化結構以LiDAR擴展板為中心,集成OLED顯示屏、IMU和電池組。
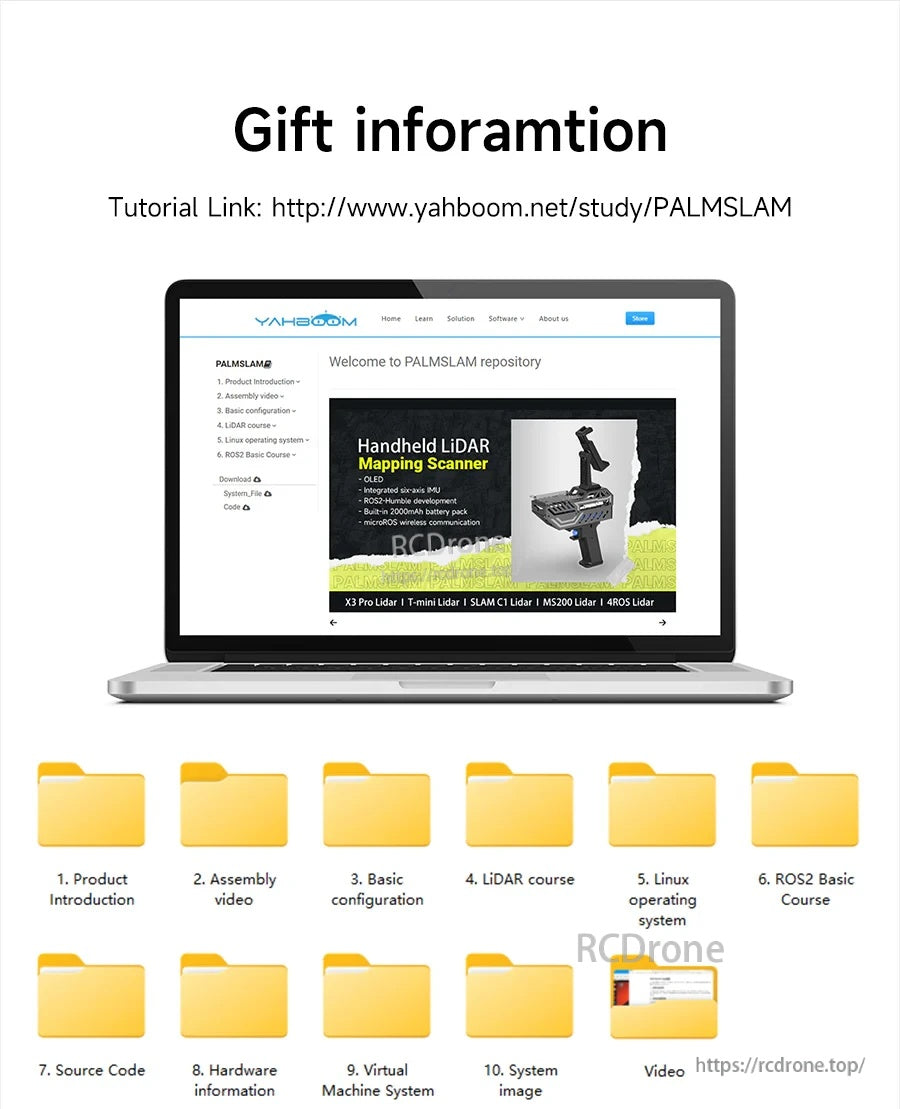
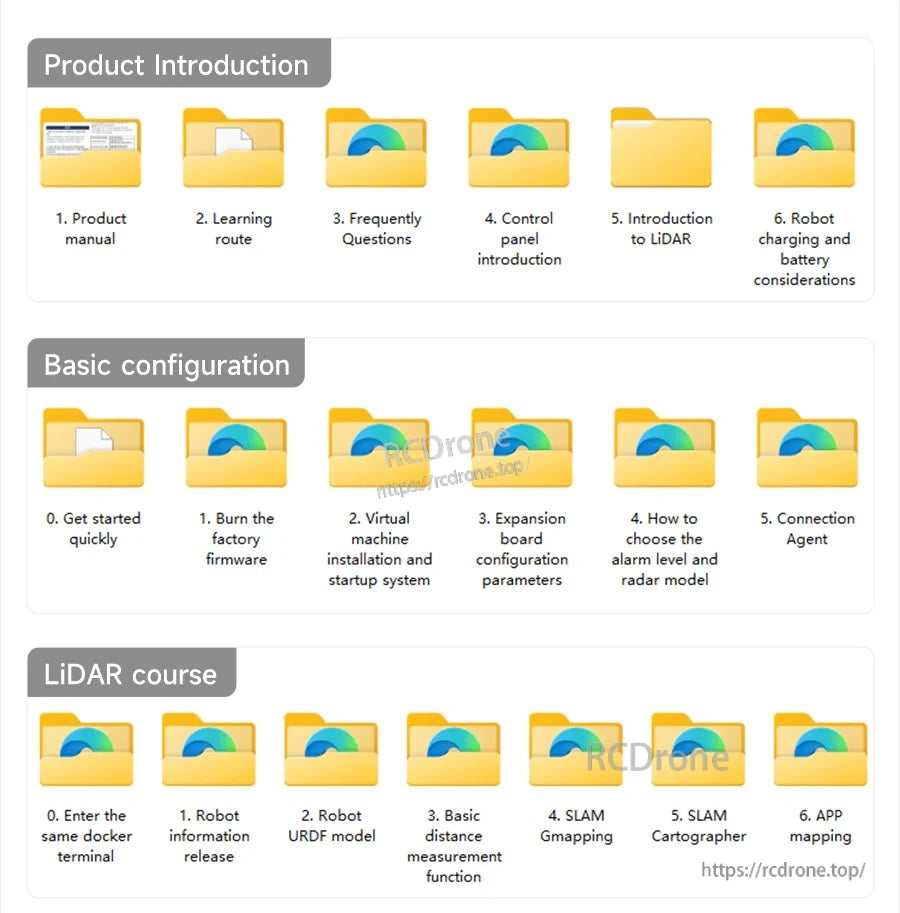
提供文檔和學習材料,以幫助組裝、配置和在ROS2中入門。
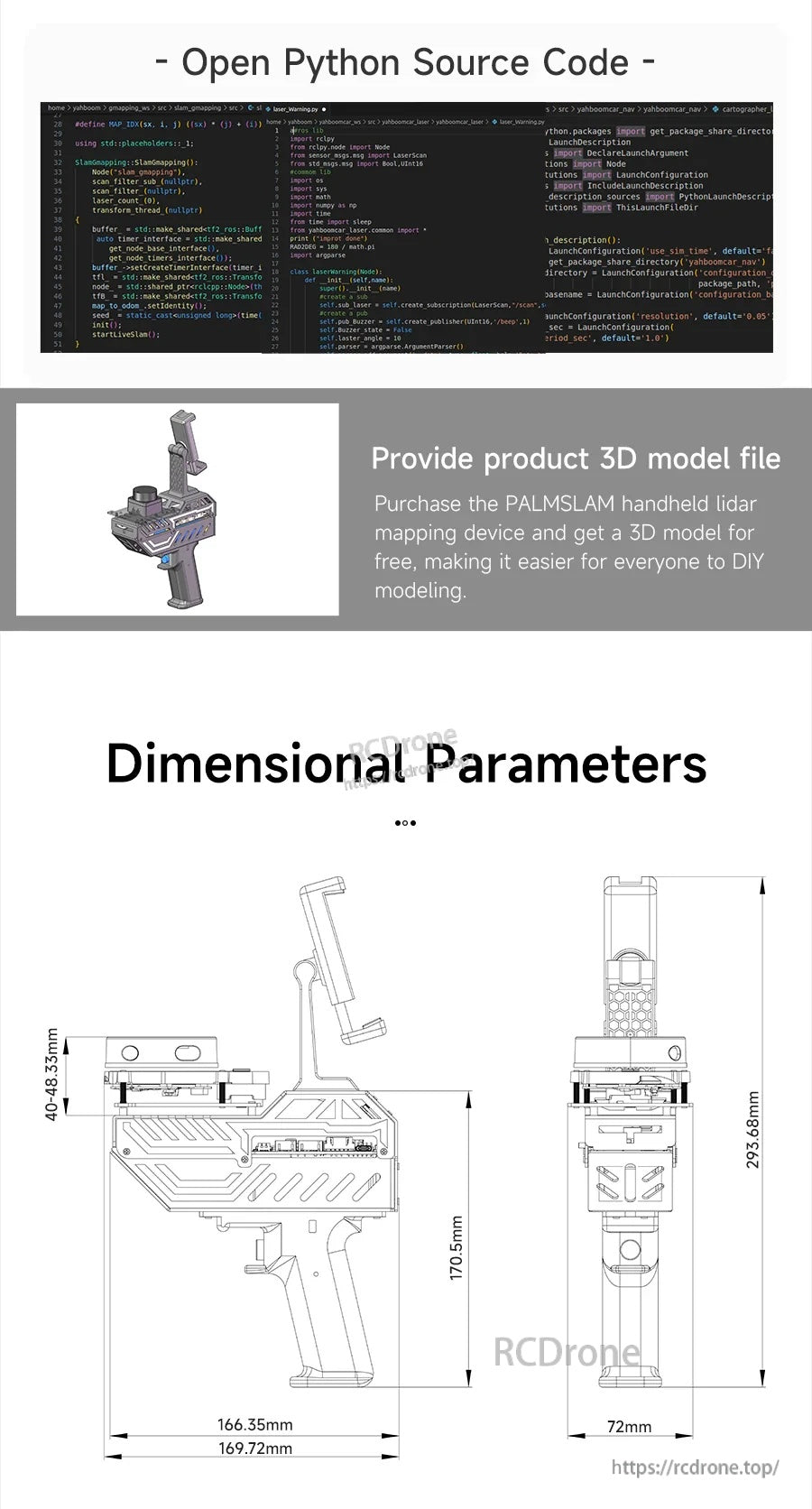
開源代碼資源、產品3D模型文件和尺寸圖支持集成和DIY構建。
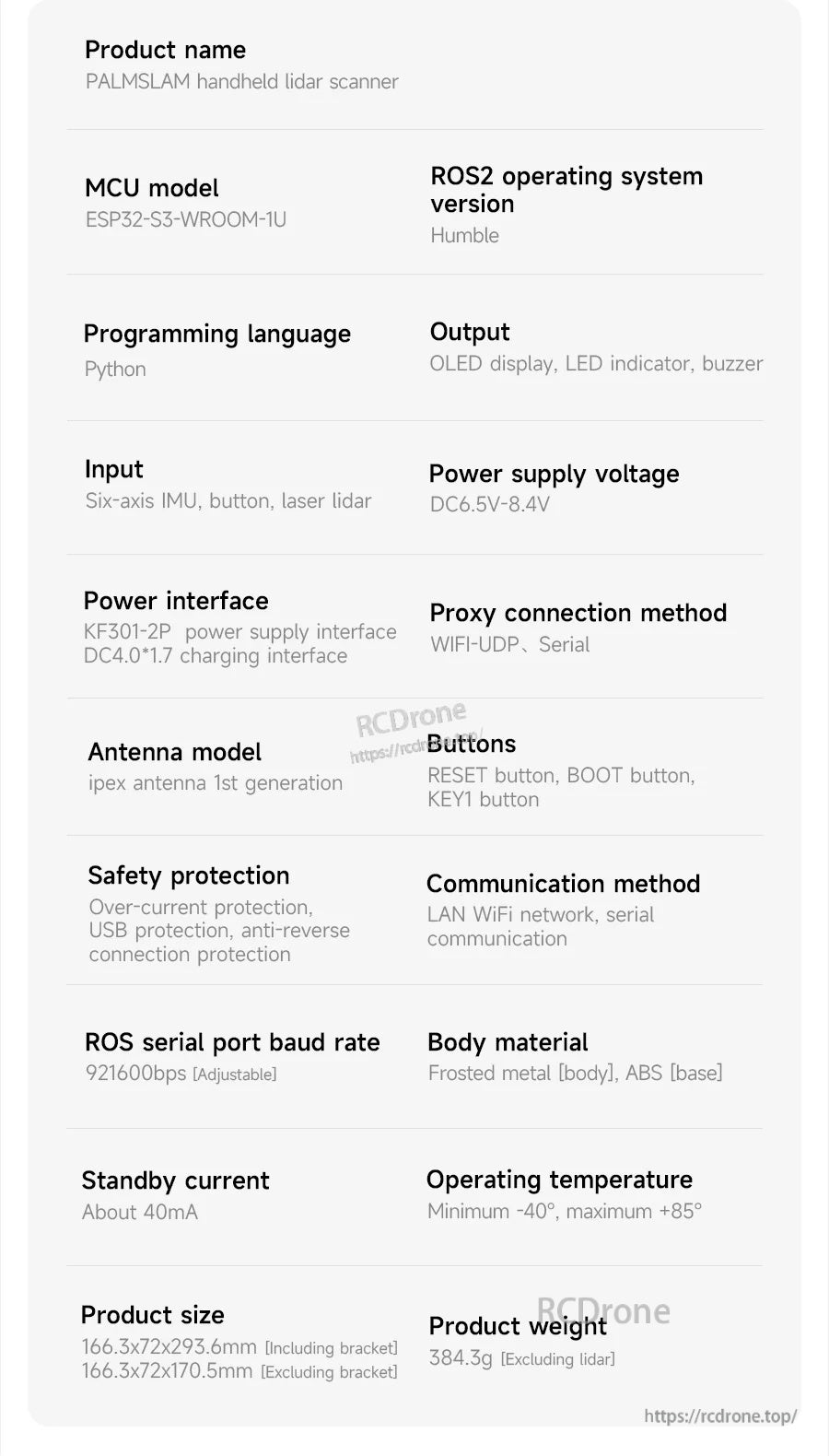
PALMSLAM手持LiDAR掃描儀規格列出ESP32-S3-WROOM-1U MCU、ROS2 Humble支持、Python編程和WiFi-UDP/串行連接。

PALMSLAM 手持式 SLAM 掃描儀支持五種 LiDAR 選項,測量範圍從 8 米到 30 米,串行通信速度高達 512000 波特率。

PALMSLAM 隨附標準配件,如上/下殼、握把、安裝板、OLED 板、電池組、充電器、電纜和基本設置工具。















