




Yahboom Raspbot 樹莓派 5 AI 視覺機器人車套件,配備 FPV CSI 攝影機、四驅、支援 Python/OpenCV
Yahboom Raspbot 樹莓派 5 AI 視覺機器人車套件,配備 FPV CSI 攝影機、四驅、支援 Python/OpenCV
Yahboom
無法載入取貨服務供應情況
概述
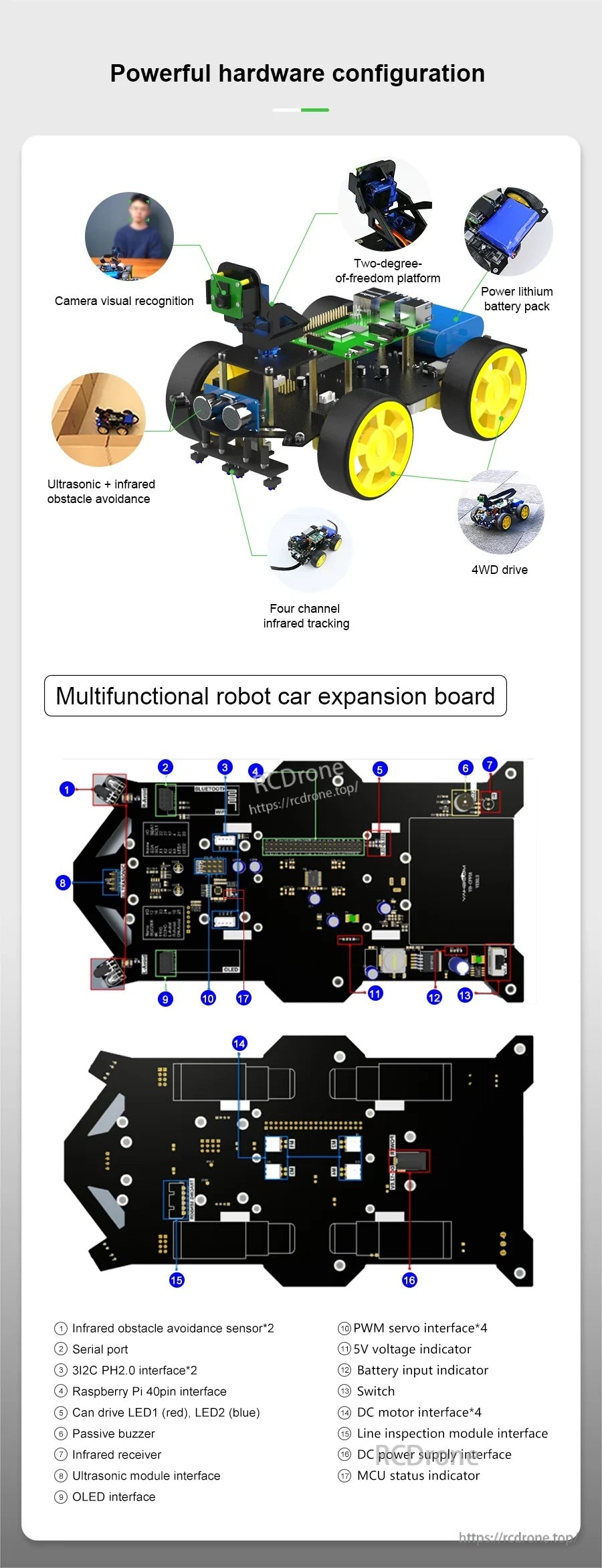
Yahboom Raspbot 是一款 AI 視覺機器人車套件 ,專為 AI 初學者設計,兼容 Raspberry Pi 5 開發板。它使用多功能機器人車擴展板作為底盤,集成了 4WD TT 馬達、高解析度 CSI 攝像頭、四通道追蹤模組和超聲波模組,用於 FPV 駕駛和 Python3 及開源 CV 的 AI 視覺學習。控制可通過 Android/iOS 應用程序、紅外遙控器和 PC(Jupyter Lab)網頁編程進行,並提供實時視頻觀看。
主要特點
- 簡單的結構便於組裝和快速學習體驗
- FPV 第一人稱視角控制,實時視頻回傳
- 豐富的控制方法:APP(iOS & Android)、PC(Jupyter Lab)、紅外遙控
- 基於 Python 編程和開源 CV 的 AI 視覺玩法:視覺識別、移動跟踪、自動駕駛、物體識別、手勢識別、QR 碼識別/控制、車牌識別、視覺巡線等
- 基於傳感器的功能:超聲波和紅外檢測障礙物避免、紅外跟踪模式、蜂鳴器播放音樂、超聲波跟隨
- 兩自由度攝像頭平台(PTZ)
配置選項
- 不含 TF 卡: 適合已擁有 Raspberry Pi 5 板和 TF 卡的用戶
- 附帶 TF 卡: 適合已經擁有 Raspberry Pi 5 板的用戶;TF 卡系統文件已寫入
- 附帶 TF 卡和 Raspberry Pi 5-4GB: 適合沒有 Raspberry Pi 5 板的用戶;TF 卡系統文件已寫入
- 附帶 TF 卡和 Raspberry Pi 5-8GB: 適合沒有 Raspberry Pi 5 板且希望進行更多擴展功能的用戶;TF 卡系統文件已寫入
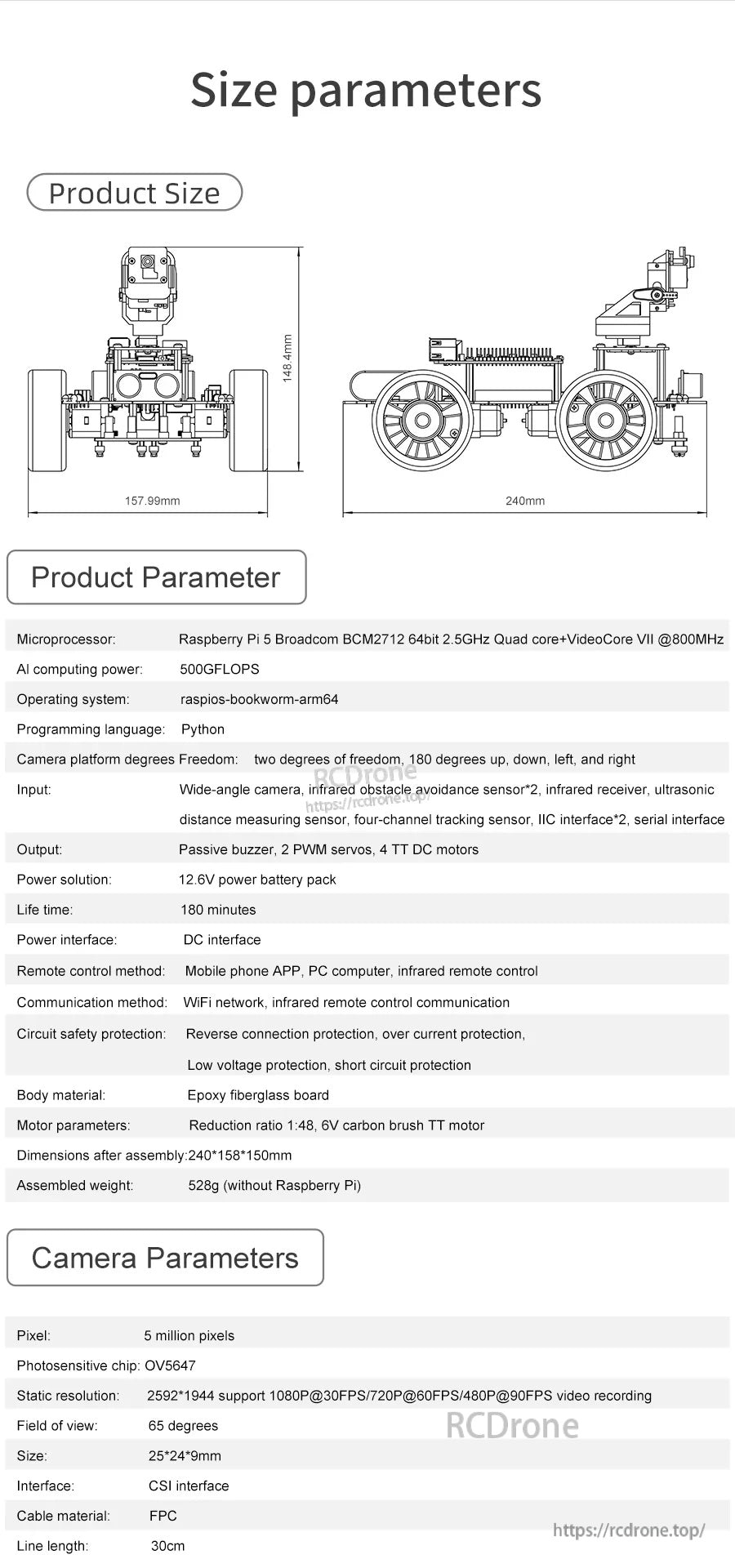
規格
| 產品尺寸(圖紙) | 長度 240 mm;寬度 157。99 mm; 高度 148.4 mm |
| 組裝後尺寸 | 240*158*150 mm |
| 組裝後重量 | 528 g (不含 Raspberry Pi) |
| 機身材料 | 環氧玻璃纖維板 |
| 微處理器 | Raspberry Pi 5 Broadcom BCM2712 64位 2.5GHz 四核 + VideoCore VII @800MHz |
| CPU (Raspberry Pi 5 參考) | Broadcom BCM2712; 四核 Cortex-A76 (ARM v8) 64位 SoC; 主頻 2.4GHz (16nm 製程) |
| GPU (Raspberry Pi 5 參考) | 800MHz VideoCore VII; 支援 OpenGLES3.1, Vulkan1.2 |
| AI 計算能力 | 500GFLOPS |
| 操作系統 | raspios-bookworm-arm64 |
| 程式語言 | Python |
| 驅動 | 四輪驅動 |
| 馬達參數 | 減速比 1:48; 6V 碳刷 TT 馬達 |
| 攝像平台自由度 | 兩個自由度;上下左右 180 度 |
| 輸入 | 廣角攝像頭;紅外線避障傳感器*2;紅外線接收器;超聲波測距傳感器;四通道循跡傳感器;IIC 接口*2;串行接口 |
| 輸出 | 被動蜂鳴器;2 個 PWM 伺服器;4 個 TT 直流馬達 |
| 電源解決方案 | 12.6V 電池組 |
| 使用壽命 | 180 分鐘 |
| 電源接口 | DC 接口 |
| 遙控方式 | 手機 APP;PC 電腦;紅外遙控 |
| 通信方式 | WiFi 網絡;紅外遙控通信 |
| 電路安全保護 | 反接保護;過流保護;低壓保護;短路保護 |
攝像頭參數
| 像素 | 500 萬像素 |
| 感光芯片 | OV5647 |
| 靜態分辨率 | 2592*1944; 支援 1080P@30FPS / 720P@60FPS / 480P@90FPS video 錄影 |
| 視野 | 65 度 |
| 尺寸 | 25*24*9 mm |
| 介面 | CSI 介面 |
| 線材材質 | FPC |
| 線長 | 30 cm |
擴展板介面(多功能機器人車擴展板)
- 紅外線避障傳感器*2
- 串口
- I2C PH2.0 接口*2
- Raspberry Pi 40pin 接口
- 可驅動 LED1(紅色)、LED2(藍色)
- 被動蜂鳴器
- 紅外接收器
- 超聲波模組接口
- OLED 接口
- PWM 伺服接口*4
- 5V 電壓指示燈
- 電池輸入指示燈
- 開關
- 直流電機接口*4
- 巡線模組接口
- 直流電源接口
- MCU 狀態指示燈
應用
- Raspberry Pi 5 機器人學習和 AI 視覺項目
- Python3 + OpenCV 實踐(跟踪、識別和自動駕駛演示)
- 通過應用程序和 Jupyter Lab 進行 FPV 機器人車編程
如需訂單協助、配置選擇或技術支持,請聯繫 https://rcdrone.top/ 或發送電子郵件至 [email protected] .
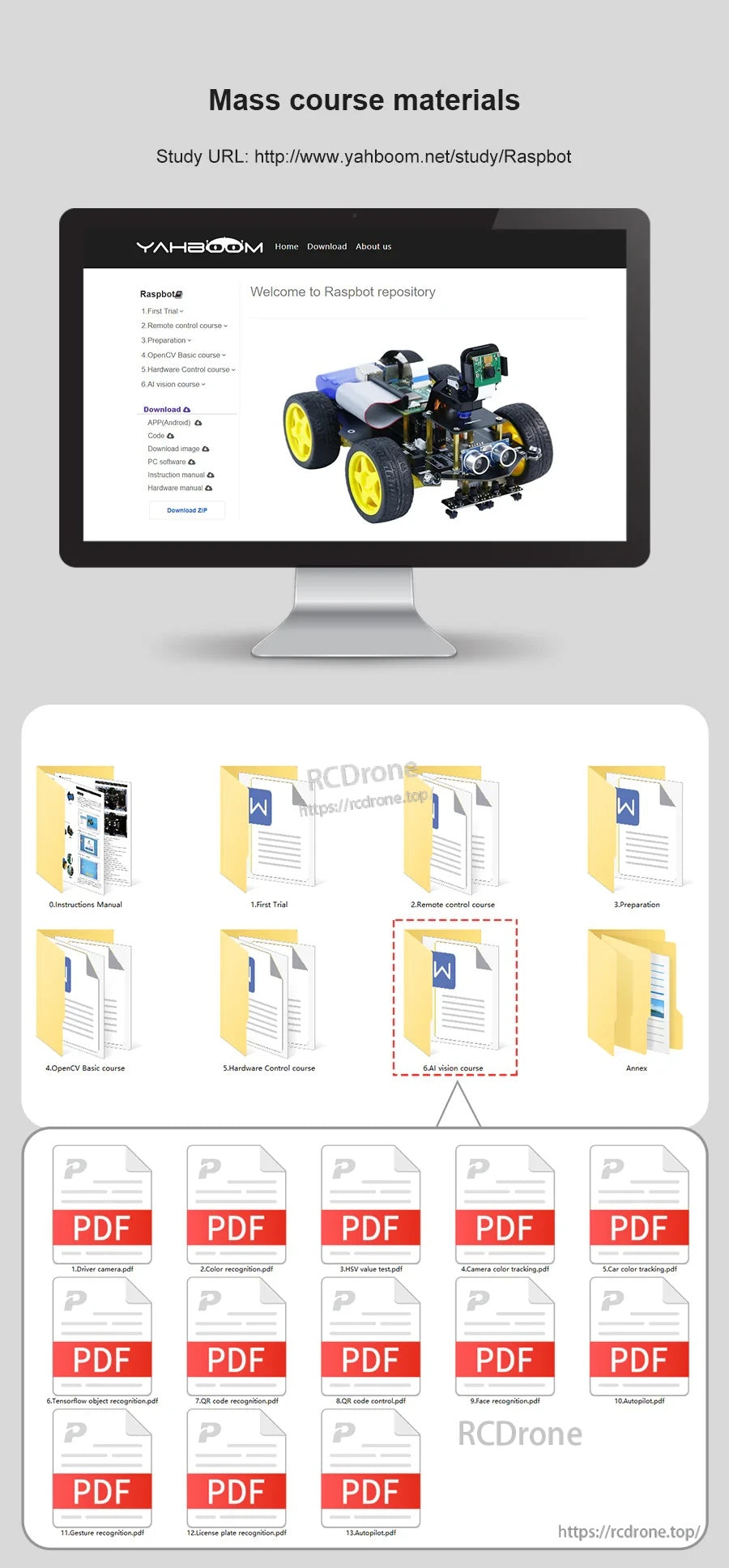
手冊
學習網址:http://www.yahboom.net/study/Raspbot
- 說明手冊
- 首次試用
- 遙控課程
- 準備
- OpenCV 基礎課程
- 硬體控制課程
- AI 視覺課程
- 附錄
- 顯示的PDF:驅動程式camera.pdf; 顏色recognition.pdf; HSV 值test.pdf; 攝像頭顏色tracking.pdf; 車輛顏色tracking.pdf; Tensorflow 物件recognition.pdf; QR 碼recognition.pdf; QR 碼control.pdf; 人臉recognition.pdf; Autopilot.pdf; 手勢recognition.pdf; 車牌recognition.pdf; Autopilot.pdf
詳情

在 Raspberry Pi 5 上開始學習 AI 視覺,使用結合 FPV 駕駛、攝像頭雲台和車載傳感器的 4WD 機器人車。
Python + 開源 CV 遊戲玩法涵蓋視覺識別、跟踪和自動駕駛,支持 FPV 控制和移動應用程序。
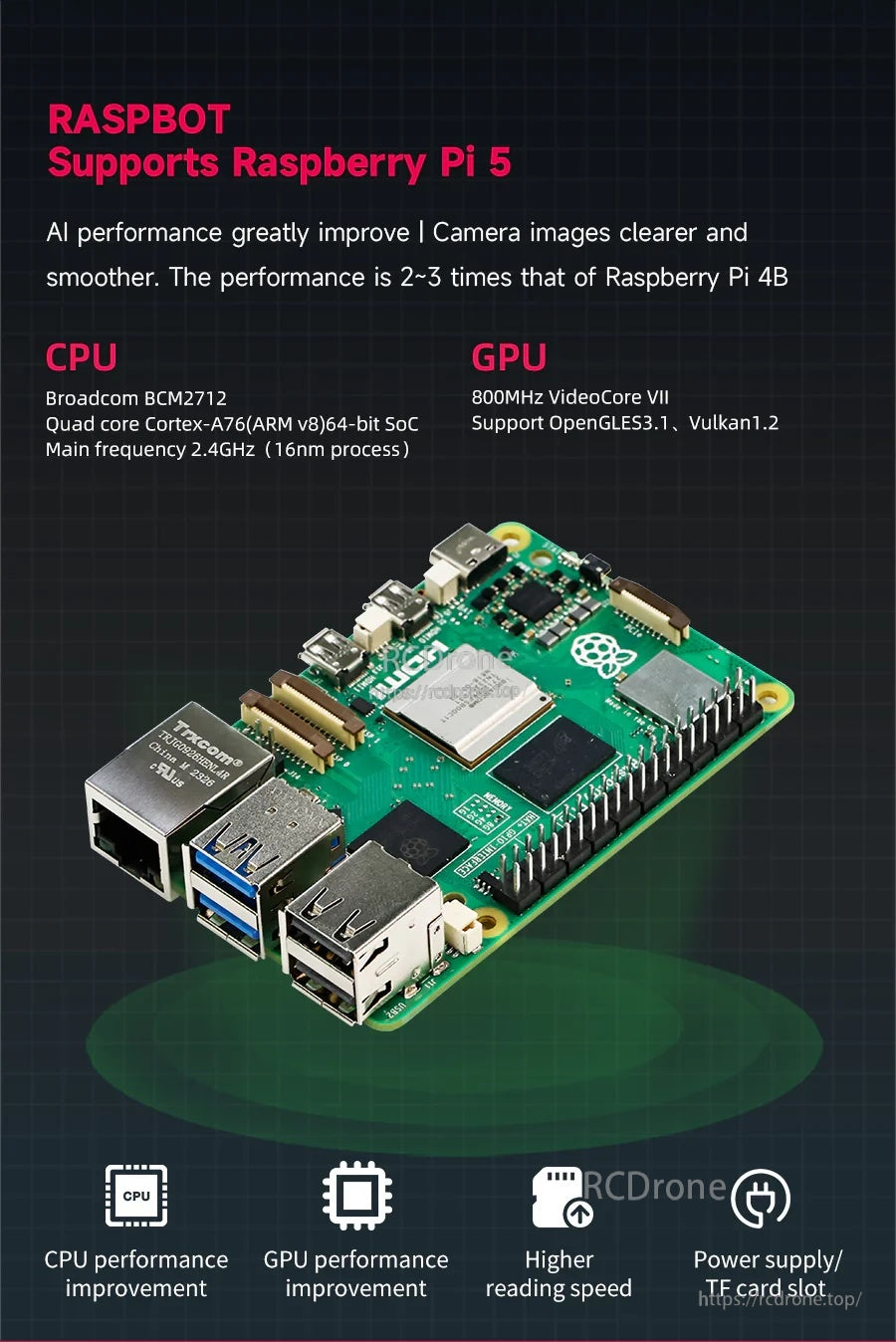
專為Raspberry Pi 5性能而設計,支持更流暢的相機處理,用於計算機視覺學習項目。
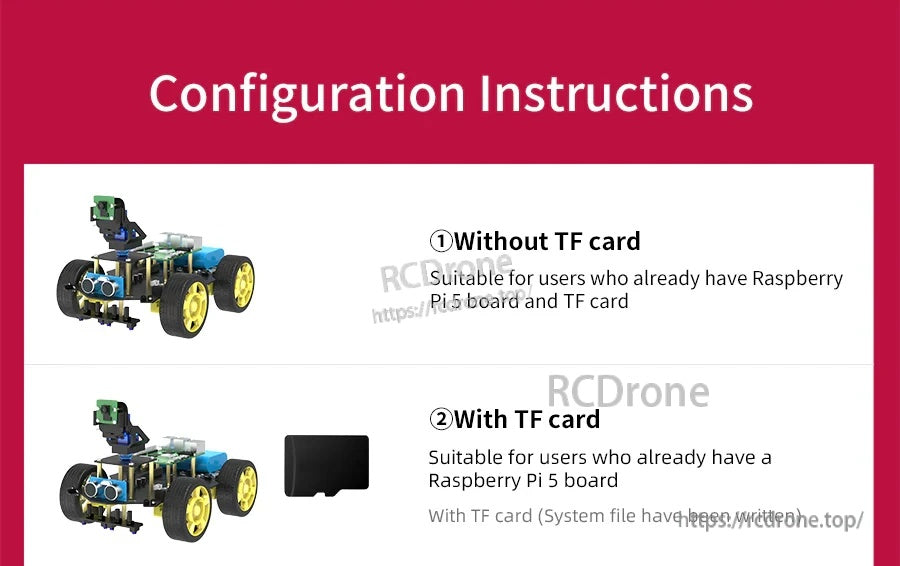
根據您是否已經擁有Raspberry Pi 5的microSD(TF)卡來選擇套件配置。
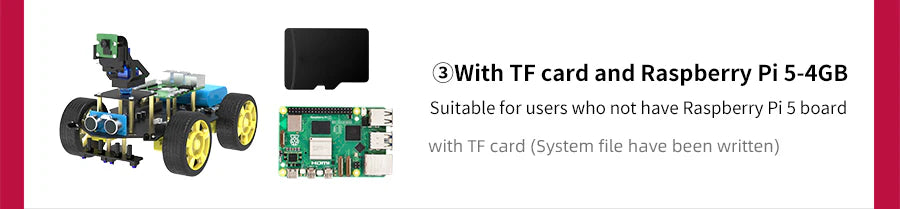
捆綁選項提供預裝TF卡和Raspberry Pi 5(4GB),以加快設置速度。

為了擴展更多空間,Raspberry Pi 5(8GB)捆綁包配有預寫TF卡,便於快速啟動。
一種經濟實惠的方式來探索Raspberry Pi上的AI視覺,將CSI相機、PTZ支架和機器人底盤結合在一個構建中。

從iOS/Android以FPV模式駕駛,實時視頻回傳和屏幕遙控界面。
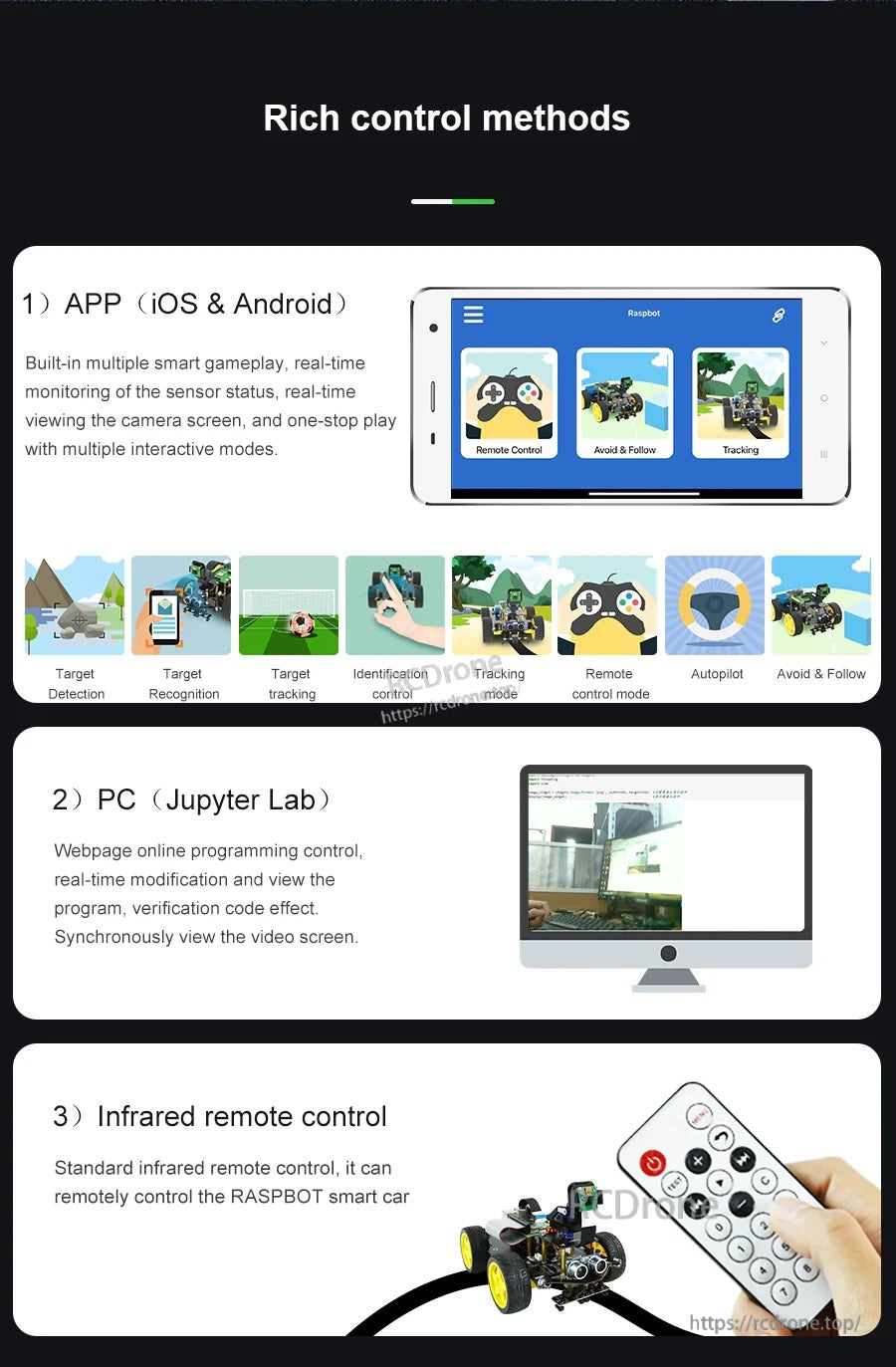
以您的方式控制——移動應用程序駕駛,JupyterLab中的PC網頁編程,或使用附帶的紅外遙控器。
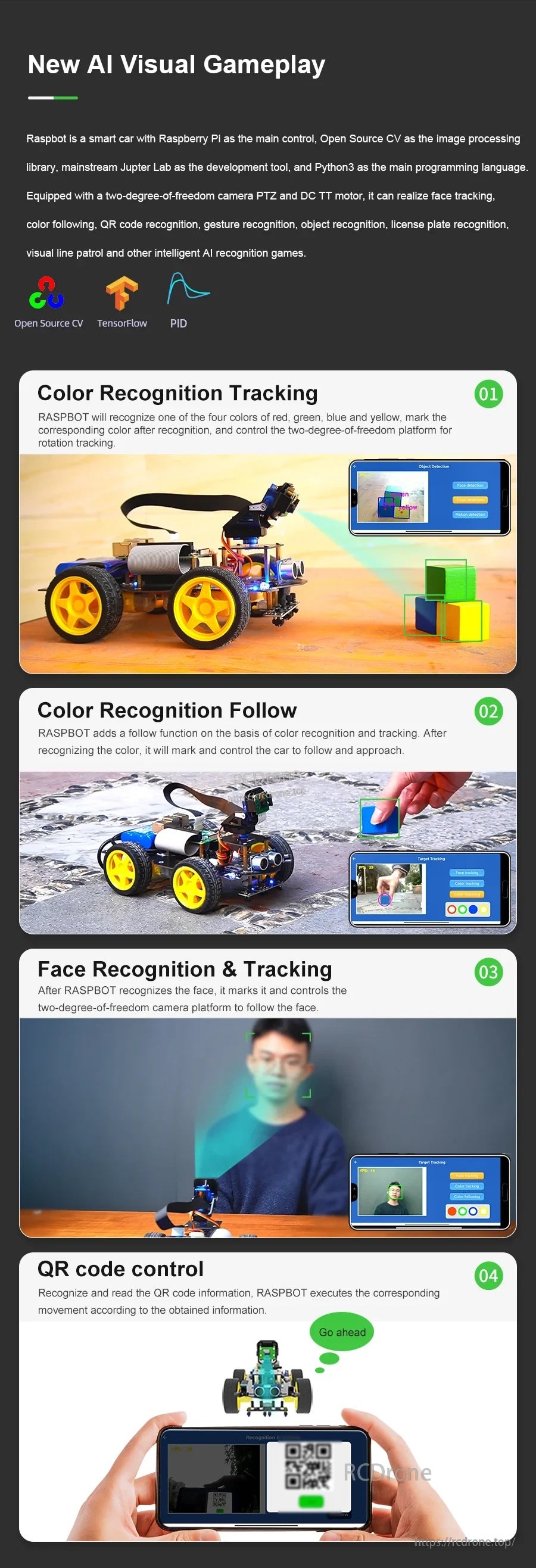
預建的演示幫助您練習顏色追蹤、跟隨行為和使用基於Python的視覺例程進行QR碼控制。

自動駕駛例程使用OpenCV處理和PID控制概念來支持自動駕駛實驗。
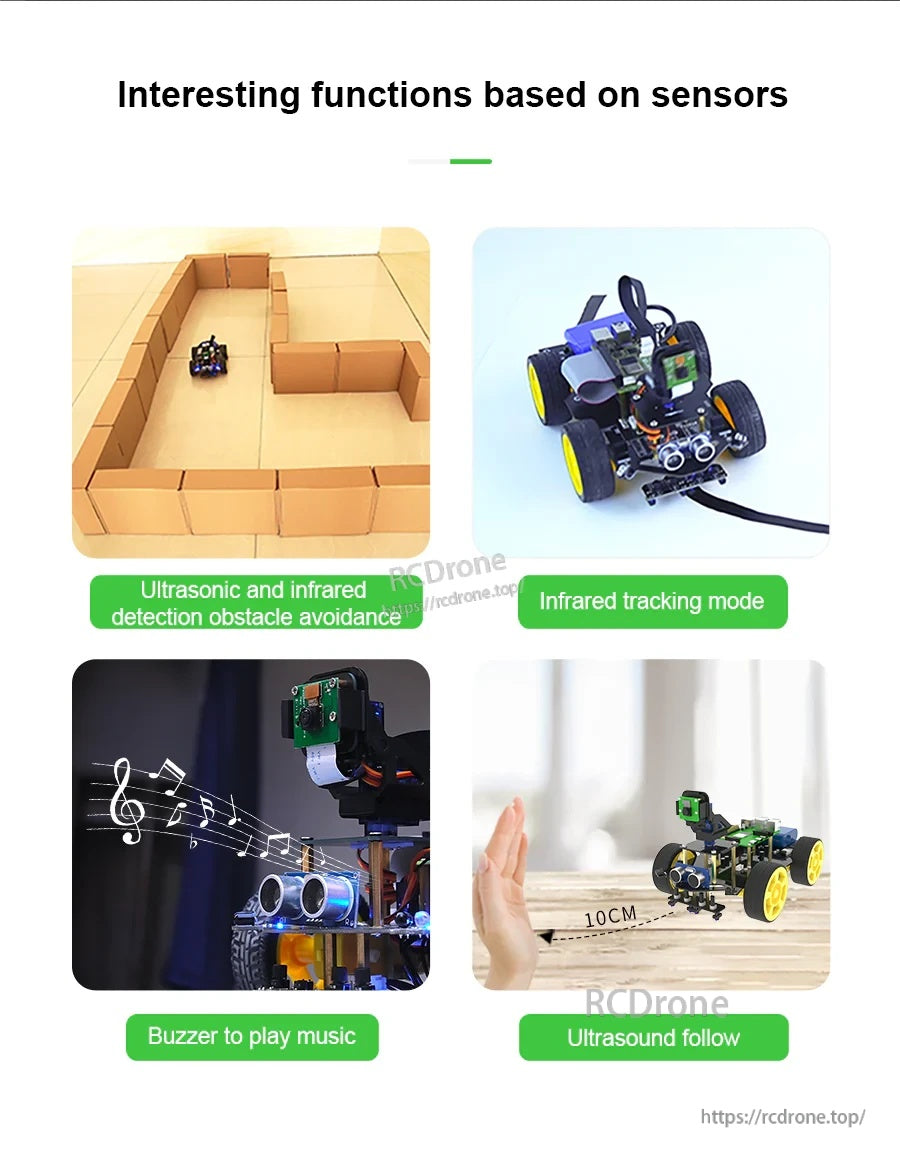
基於傳感器的遊戲包括避障、紅外線跟蹤、超聲波跟隨和蜂鳴器音效。
核心硬件集成了一個多功能擴展板,具有四輪驅動、攝像頭俯仰、超聲波測距和跟蹤模塊。
逐步的課程和可下載的文件支持組裝、編碼和視覺實驗。
在組裝之前檢查尺寸和關鍵規格,包括攝像頭接口細節和整體組裝尺寸。

組裝所需的一切都已列出,包括底盤電子設備、馬達、傳感器、電纜、遙控器和工具(選項可能有所不同)。






